Асинхронные машины
II Асинхронные машины
2.1. Устройство и принцип действия асинхронного двигателя
Слово асинхронно означает неодновременное вращение поля статора и ротора.
Асинхронные машины самые распространенные, так как они являются наиболее простыми и надежными в эксплуатации. Асинхронная машина была изобретена М.О. Доливо-Добровольским и она была настолько совершенной, что до сих пор существенного изменения не получила.
Асинхронная машина имеет две главных части:
1) статор – неподвижная часть машины;
2) ротор – подвижная часть машины.
1. Статор представляет собой магнитопровод выполненный из листов электротехнической стали в виде полого цилиндра. Внутри этот цилиндр зубчатый, т.е. имеет выступы и пазы, в которые укладывается обмотка, предназначенная для создания вращающего магнитного поля. Обмотка состоит из 3-х фаз, оси которых сдвинуты на 120°.
2.1.1. Принцип создания вращающего магнитного поля статорной обмоткой
Рекомендуемые материалы
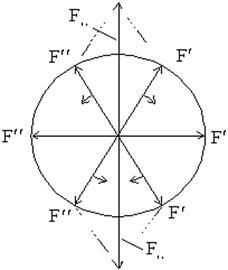
 Рассматривая положение векторов тока в различные моменты времени, мы увидим, что трехфазная обмотка будет создавать вращающее магнитное поле.
Рассматривая положение векторов тока в различные моменты времени, мы увидим, что трехфазная обмотка будет создавать вращающее магнитное поле.
Статор служит для создания вращающего магнитного поля и передачи энергии со статора на ротор.
2. Ротор – в виде сплошного цилиндра, набранного из листов электротехнической стали. С наружи имеются пазы где укладывается обмотка. Железо ротора насажено на вал. Между статором и ротором имеется воздушный зазор d = 0,3 ¸ 1,5 мм.
2.1.2. Принцип действия асинхронного двигателя
 При включении обмотки статора в сеть, создается вращающееся магнитное поле. Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток. Этот ток будет взаимодействовать с магнитным потоком. Взаимодействие вращающего магнитного поля статора с током в роторе создает вращающий момент, за счет которого ротор будет вращаться в ту же сторону, что и поле, но с небольшим отставанием.
При включении обмотки статора в сеть, создается вращающееся магнитное поле. Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток. Этот ток будет взаимодействовать с магнитным потоком. Взаимодействие вращающего магнитного поля статора с током в роторе создает вращающий момент, за счет которого ротор будет вращаться в ту же сторону, что и поле, но с небольшим отставанием.
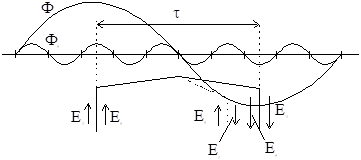
При вращении поля n1 в проводнике ротора наведется ЭДС к нам, правило правой руки. Ток также будет направлен к нам. По правилу левой руки проводник с током попал в магнитное поле на него будет действовать сила f, под действием которой ротор будет вращаться в туже сторону, что и магнитное поле статора.
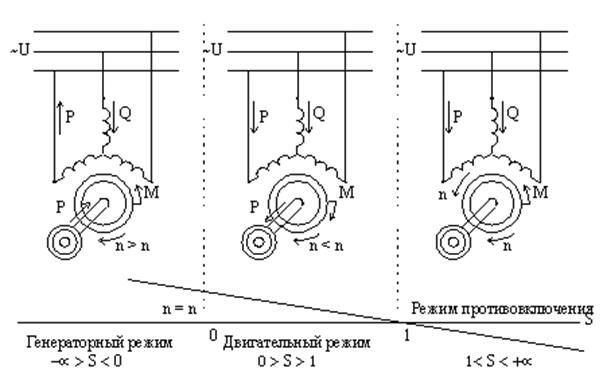
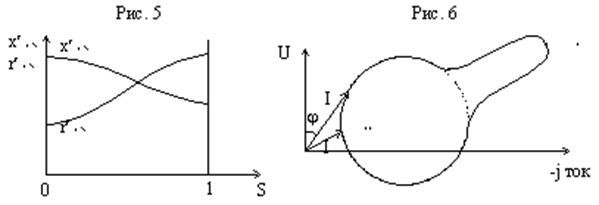
На рисунке n1 – скорость магнитного поля статора; n – скорость ротора; S – скольжение.

Для двигателей обычной серии Sн = 0,02 ¸ 0,05 скольжение зависит от нагрузки. Чем больше нагрузка (n¯), тем больше скольжение.
По конструкции ротора асинхронные машины делятся:
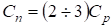
1. Асинхронная машина с фазным ротором
1. обмотки
2. контурные кольца
3. щетки
4. сопротивление
2. Асинхронная машина с короткозамкнутым ротором
2.2. Общие вопросы машин переменного тока
Эта тема относится как к асинхронным, так и к синхронным машинам.
К общим вопросам относятся:
1) обмотки машин переменного тока
2) ЭДС обмотки машин переменного тока
3) МДС (намагничивающие силы) обмоток машин переменного тока.
Устройство статора синхронной и асинхронной машин одинаково.
2.2.1. Обмотки машин переменного тока
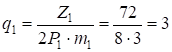
В статоре расположены три фазы сдвинутые на 120° каждая фаза на полюсном делении занимает  часть.
часть.
Обозначим:
Z1 – число пазов статора
2Р – число полюсов
Р – число пар полюсов
m1 – число фаз
 - число пазов на полюс и фазу, лежит в пределах 1 ¸ 9.
- число пазов на полюс и фазу, лежит в пределах 1 ¸ 9.
Число пазов равно
Определяющим шагом обмотки называется расстояние от начала одной катушки до конца той же катушки.
Элементы обмоток переменного тока
Из чего состоит фаза: проводник ® виток ® катушка ® катушечная группа ® фаза проводник. Два проводника составляют виток. Несколько витков составляют катушку, несколько катушек ® катушечную группу, несколько катушечных групп составляют фазу.
При однослойной обмотке – число катушечных групп в фазе = Р
При двухслойной обмотке – число катушечных групп в фазе = 2Р
Такое же соотношение максимально возможных параллельных ветвей.
С конструктивной стороны обмотки делятся на:
1) однослойные
2) двухслойные
1) Однослойные обмотки
Однослойные обмотки выполняются сравнительно редко, обычно у двигателей малой мощности. Для технологического исполнения их требуется больше меди. Однослойные обмотки характерны тем, что в пазу располагается только одна активная сторона.
Типы обмоток:
1. Концентрическая
2. Шаблонная
3. Катушечные обмотки
Концентрические обмотки выполняются чаще из жестких секций, лобовые части отгибаются в 2-3 плоскости.
Шаблонные обмотки – их секции наматываются на шаблоне и круглого провода. По расположению лобовых частей они подразделяются на цепные и вразвалку.
Катушечные обмотки широко используются на ремонтных заводах.
Пример выполнения однослойной обмотки
Дано:



 (1 ¸ 7)
(1 ¸ 7)
2) Двухслойные обмотки
|
|
Особенностью двухслойной обмотки является то, что в пазу укладывается обмотка в два слоя.
Недостатки: неудобство ремонта.
|
|
Преимущества: 1) меньше расход меди; 2) обмотку выполнить с укороченным шагом, можно избавиться от внешних гармоник ЭДС.
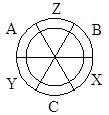
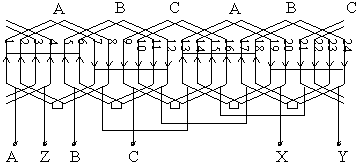
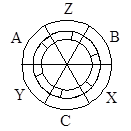
Расположение фазных зон по пазам Z1 = 24
 (1 ¸ 6)
(1 ¸ 6)
a = 30° q1 = 2
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| A | A | Z | Z | B | B | X | X | C | C | Y | Y | A | A | Z | Z | B | B | X | X | C | C | Y | Y |
| A | Z | Z | B | B | X | X | C | C | Y | Y | A | A | Z | Z | B | B | X | X | C | C | Y | Y | A |
В двухслойной обмотке число катушечных групп в фазе равно числу полюсов (2P = 4). У катушечных групп чередование катушечных групп по фазам А,С,В, таких чередований будет равно числу полюсов (2P = 4) АСВ, АСВ, АСВ, АСВ.
Каждая фаза состоит из четырех катушечных групп их соединение в фазу: Н – К – К – Н – Н – К – К – Н (Х)
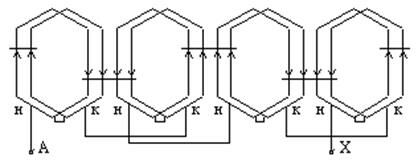
В данной обмотке чередование катушечных групп с 2 катушками, т.е.
2 – 2 – 2 – 2 – при q – целом.
Имеются обмотки с дробным q, например, в многоскоростных обмотках, когда в одних пазах укладываются две обмотки на разное число полюсов.
Дробное 
Пример.




q2 ® число 5 означает, что в чередовании участвует пять катушечных групп – d; числитель с = 2, говорит о том, что катушечные группы имеют катушек на одну больше; b – остальные катушки группы имеют по две катушки, т.е. чередование катушечных групп будет следующее:
2 – 3 – 2 – 3 – 2 – q – дробное.
Роторные обмотки
Роторные обмотки выполняются так же как и на статоре (3 фазы сдвинуты на 120°). В малых машинах делается обмотка петлевая катушечная.
В машинах же средней и большой мощности обмотки в роторе делаются волновые или даже волновые стержневые. Волновые обмотки имеют преимущество при большом числе полюсов, т.к. при этом не нужно расходовать медь для межкатушечных соединений. Выводы волновой обмотки ротора должны быть симметричными, иначе будет биение ротора. Для выводов концов обмотки и переходов используются специальные таблицы в зависимости от Z2 и 2Р. У асинхронных двигателей с короткозамкнутой обмоткой – обмотка имеет вид беличьей клетки. Для машинной укладки обмоток используется обмотка – одно-двухслойная.
2.2.2. Электродвижущая сила (ЭДС) обмотки машин переменного тока
 ЭДС фазы проследим по следующей структуре: проводник – виток - катушка - катушечная группа – фаза.
ЭДС фазы проследим по следующей структуре: проводник – виток - катушка - катушечная группа – фаза.
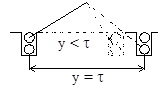
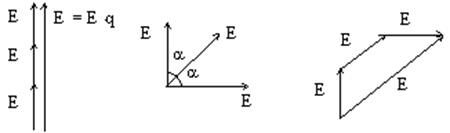
Определим ЭДС проводника и витка с полным шагом y = t.
При этом, так как проводники находятся в одинаковых магнитных условиях, то ЭДС витка будет равна арифметической сумме (см. рис.).
1. ЭДС проводника
 .
.  ,
,  ,
,
Действующее значение ЭДС проводника
2. ЭДС витка с полным шагом
3. ЭДС витка с укороченным шагом
Если виток имеет шаг y <t, то проводники витка расположены в разных магнитных условиях. Поэтому для определения ЭДС витка необходимо геометрически сложить ЭДС этих проводников.
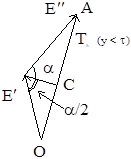

 , t - 180°, y - a,
, t - 180°, y - a,  , тогда
, тогда


4. Определение ЭДС катушки
Витки катушки лежат в одних пазах, поэтому ЭДС катушки равна ЭДС одного витка на число витков в катушке.

5. Определение ЭДС катушечной группы
 Если бы обмотка была сосредоточенной, т.е. катушки были расположены в одних осях, то ЭДС катушечной группы определялась бы как произведение ЭДС катушки на число катушек в катушечной группе, т.е. Ek×q (см. рис.) q = 3.
Если бы обмотка была сосредоточенной, т.е. катушки были расположены в одних осях, то ЭДС катушечной группы определялась бы как произведение ЭДС катушки на число катушек в катушечной группе, т.е. Ek×q (см. рис.) q = 3.
В распределенных обмотках катушки расположены в разных пазах, то для определения ЭДС катушечной группы необходимо геометрически сложить ЭДС каждой катушки, т.е. Eг < Ek×q
 . (Зная Кр, определим Eг).
. (Зная Кр, определим Eг). 
a - электрический угол.
В электрической машине необходимо различать пространственный и электрический угол.
Одной электрической окружности соответствует - 360° эл. т.е. (2t, Р). Например, если машина имеет число полюсов 2Р = 4, Р = 2, то в одной пространственной окружности две электрических. В общем случае, если машина имеет Р пар полюсов, то в одной пространственной окружности Р электрических и электрический угол a = aпр×Р.
Пример. 2Р = 4, Р = 2 получим в одной пространственной окружности две электрических.
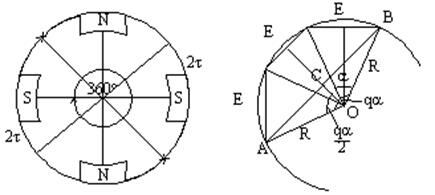
Определение коэффициента распределения - Кр.
 - ЭДС катушечной группы
- ЭДС катушечной группы
ЭДС катушки  , запишем отношение
, запишем отношение
 .
.

6. Определение ЭДС фазы.
Фаза состоит из нескольких катушечных групп, все катушечные группы расположены в одинаковых магнитных условиях, поэтому ЭДС фазы будет равна ЭДС катушечной группы умноженной на число их в фазе.
Если обмотка однослойная, то число катушечных групп в фазе равно числу пар полюсов – Р,

Если обмотка двухслойная, то число катушечных групп в фазе равно числу полюсов – 2Р
 , перепишем иначе
, перепишем иначе

 , К0 = Ку × Кр
, К0 = Ку × Кр
где W – число витков в фазе;
К0 - обмоточный коэффициент;
Ф – магнитный поток в веберах;
ФКу – максимально сцепленный поток с катушкой.
Выражение ЭДС фазы для первой гармоники.
ЭДС от высших гармоник потока
 В общем случае кривая магнитного потока на полюс несинусоидальна. Если ее разложить, то кроме первой гармоники будут гармоники высшего порядка.
В общем случае кривая магнитного потока на полюс несинусоидальна. Если ее разложить, то кроме первой гармоники будут гармоники высшего порядка.
ЭДС от потока n гармоники запишется

полюсное деление  , а число полюсов
, а число полюсов  .
.
1.  (для генератора)
(для генератора)
2. 
3.  .
.  ,
, 
Если укорочение  , то исчезнет пятая гармоника ЭДС
, то исчезнет пятая гармоника ЭДС
 ,
,  ,
, 
уменьшатся и 3 и 7 гармоники.
Пояснение, почему исчезает пятая гармоника ЭДС. Укорочение на 1/5t приводит к тому, что по контуру Е5 направлены встречно и их сумма равна 0.
Укорочение шага приводит к исчезновению пятой гармоники, третья гармоника уменьшается на половину, отсюда видно, что укорочение шага приводит к тому, что кривая ЭДС приближается к синусоиде и
он также меньше, чем для основной гармоники ЭДС.
Теперь можно подсчитать фазную ЭДС любой гармоники. Если обмотки соединены звездой, то в кривой линейных ЭДС – ЭДС кратным 3-м не будет. Если обмотки соединены в треугольник, то в линейных ЭДС их также не будет, т.к. они замкнутся по контуру.
2.2.3. Намагничивающая сила обмоток машин переменного тока
Рассмотрим в начале намагничивающую силу однофазной обмотки.
 а) Намагничивающая сила однофазной обмотки.
а) Намагничивающая сила однофазной обмотки.
Рассмотрим в начале простой случай, 2-х полюсную обмотку однослойную 2Р = 2, Р = 1 с полным шагом у = t = q = 1, т.е. катушка и будет фаза намагничивающая сила катушки F = i×Wk, а на полюс Fk =1/2×i×Wk, так как любая магнитная силовая линия сцеплена с одним и тем током i и число витков W, то н.с. на полюсном делении будет в пространстве постоянной, т.е. в пространстве намагничивающая сила катушки имеет форму прямоугольника, а во времени изменяется по синусоидальному закону, т.к.
 максимум
максимум 
Первая пространственная гармоника  ;
;
Амплитуда намагничивающей силы катушечной группы однослойной обмотки

Амплитуда намагничивающей силы катушечной группы двухслойной обмотки с укороченным шагом

Намагничивающая сила фазы для двухслойной обмотки

 Чаще используют амплитуду н.с. на один полюс
Чаще используют амплитуду н.с. на один полюс
 или
или 
Запишем закон изменения н.с. однофазной обмотки.
Для оси фазы 
Намагничивающая сила  в любой точке пространства и в любой момент времени определится
в любой точке пространства и в любой момент времени определится
 , или
, или 
Это выражение пульсирующей волны намагничивающей силы фазы. Более удобно иметь дело с вращающейся намагничивающей силой, но с постоянной амплитудой. Заменим пульсирующую н.с. двумя бегущими волнами, используя тригонометрическую формулу
 , отсюда
, отсюда
 , тогда
, тогда

 - прямая волна,
- прямая волна,  - обратная волна.
- обратная волна.
Представим графически, что пульсирующая волна равна сумме двух бегущих волн в разные стороны с постоянной амплитудой. Условием бегущей волны является постоянство аргумента при синусе, т.е. для прямой волны
 , продифференцируем
, продифференцируем  ,
, 
 , число оборотов
, число оборотов  , об/сек,
, об/сек,
в минуту  .
.
Для обратной волны  ,
,  .
.
Итак, пульсирующую н.с. фазы разложили на две бегущие волны, которые двигаются с постоянной амплитудой в разные стороны с синхронной скоростью.
б) Намагничивающая сила трехфазной обмотки.
Намагничивающая сила обмотки является базой для определения потока.
Запишем намагничивающие силы для трех фаз в виде пульсирующих волн, а затем разложим их на прямую и обратную волну, затем их сложим, то получим намагничивающую силу трехфазной обмотки

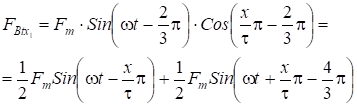
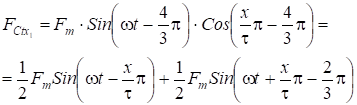
 +0,
+0,
сумма обратных волн равна 0, т.к. сдвиг на  и
и 
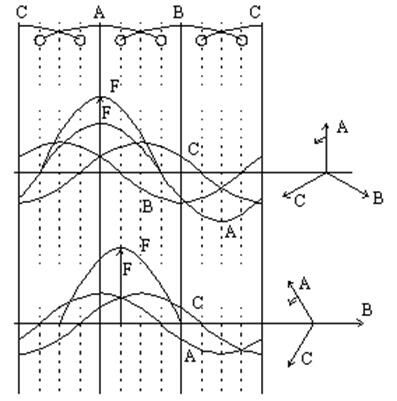
Намагничивающая сила трехфазной обмотки есть сумма прямых волн, что это бегущая волна, которая двигается вдоль зазора с синхронной скоростью и с постоянной амплитудой. Эта н.с. создает вращающееся магнитное поле, которое движется вдоль зазора с синхронной скоростью и постоянной амплитудой.
Покажем графически, что три пульсирующие волны трех фаз создают в любой момент времени бегущую волну с постоянной амплитудой.
Для изменения направления движения волны необходимо поменять чередование фаз, т.е. сменить любые две фазы.
в) Намагничивающие силы высших гармоник
Вопрос о высших гармонических намагничивающих сил очень сложен. Высшие гармоники могут быть пространственные и временные. Мы рассматриваем пространственные высшие гармоники, вызванные расположением самой обмотки в пространстве.
Амплитуда намагничивающей силы n гармоники запишется
Высшие гармоники намагничивающих сил однофазной обмотки
Пульсирующая волна.
 ,
,
разложим на две бегущие волны

Здесь тоже будет прямая и обратная волна.
Скорость прямой волны
 ,
,  ;
;  ;
; 
Скорость обратной волны

т.е. скорость н.с. n гармоники в n раз меньше основной гармоники.
Высшие гармоники намагничивающих сил трехфазной обмотки
Если намагничивающие силы высших гармоник трех фаз разложить на прямую и обратную волну, а затем их сложить, то будет видно, что высшие гармоники н.с. будут вести себя по-разному.


1. Гармоники четные исчезнут, т.к. гармоники симметричны оси абсцисс.
2. Гармоники кратные 3-м выпадут. n = 3, т.к.  - для всех трех фаз будет иметь Cos одного и того же угла, а сумма же амплитуд сдвинутых на угол и с одинаковыми амплитудами равна нулю.
- для всех трех фаз будет иметь Cos одного и того же угла, а сумма же амплитуд сдвинутых на угол и с одинаковыми амплитудами равна нулю.
Другие гармоники будут вести себя по разному, одни будут вращаться в одну сторону, другие в другую при одном чередовании фаз.
Гармоники порядка  , где а = 1, 2, 3. n = 5, 11, 17 … которым соответствует выражение
, где а = 1, 2, 3. n = 5, 11, 17 … которым соответствует выражение
Эти гармоники будут вращаться в обратную сторону по отношению к н.с. первой гармоники.
Посмотрим чередование фаз.
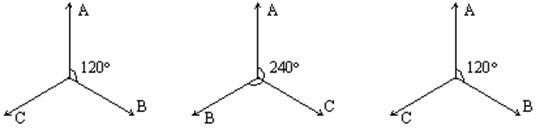
| Для первой гармоники A1 - B1 ® 120° | A5 – B5 = 120×5 = 600 = 360 + 240° обратное чередование фаз | A7 – B7 = 120×7 = 840 = 2×360 + 120° прямое чередование фаз |
Гармоники порядка  , n = 7, 13, 19 будут вращаться в сторону первой гармоники.
, n = 7, 13, 19 будут вращаться в сторону первой гармоники.
2.3. Рабочий процесс асинхронного двигателя
2.3.1. Режимы работы асинхронной машины
 Пусть в начале ротор не вращается. Магнитное поле, пересекая проводники ротора индуктируют в них ЭДС. При замкнутой цепи ротора по обмотке его потечет ток.
Пусть в начале ротор не вращается. Магнитное поле, пересекая проводники ротора индуктируют в них ЭДС. При замкнутой цепи ротора по обмотке его потечет ток.
Взаимодействие потока статора и тока ротора вызовет усилие, действующее на проводник, под действием которого ротор начнет вращаться. Вращение будет в ту же сторону, что магнитный поток. Скорость ротора будет меньше скорости вращения магнитного поля статора. Скольжение
 .
.
Разберемся, в каких пределах будет изменяться скольжение.
1. Момент зависит от потока Ф и тока I2 при U = const, поток также постоянен. Если увеличивается момент на валу, то увеличивается и момент двигателя за счет увеличения тока I2, а I2 Е2 S, S за счет увеличения интенсивного пересечения проводников ротора.
При неподвижном роторе n = 0, S = 1
Если ротор будет вращаться с n = n1, S = 0
Это диапазон скольжений соответствует двигательному режиму. Мощность потребляемая из сети будет преобразована в механическую на валу.
2. Но если под действием спускаемого груза раскрутить ротор до скорости больше синхронной, то машина перейдет в генераторный режим
n > n1, S < 0 - скольжение отрицательное
При этом режиме механическая мощность будет преобразована в электрическую, которая будет отдаваться в сеть Р1, а реактивная будет потребляться для создания магнитного потока - Q.
3. Режим противовключения.
Если например в приводе имеется большой маховик, то если отключить двигатель, то маховик будет вращаться длительное время до остановки, но если же мы переключим две фазы асинхронного двигателя, то его момент будет направлен против вращения маховика и время останова его резко сократиться. При этом режиме мощность будет потребляться из сети и механическая мощность будет теряться в роторе. Это тяжелый режим для асинхронной машины. Поэтому, если используется двигатель с фазным ротором, то на период работы в цепь ротора включают значительное сопротивление для ограничения тока. Если же используется короткозамкнутый двигатель, то пускают его при пониженном напряжении. Ниже на рисунке представлены все три режима работы асинхронной машины.
2.3.2. Режим двигателя
Рассмотрим два крайних режима двигателя:
а) холостой ход двигателя
При холостом ходе нет нагрузки на валу, ротор под действием вращающего магнитного поля статора разгонится до скорости близкой к синхронной, а ток статора равен току холостого хода. Мощность, потребляемая из сети пойдет на покрытие потерь, т.е.
Ро = Рэл1 + Рмг + Рмех + Рдоб
Разница между тр-м и двигателем будет только конструктивная. В двигателе имеется воздушный зазор. Поэтому ток холостого хода двигателя равен 20 - 30° от номинального.
б) режим короткого замыкания
При этом режиме ротор механически заторможен, а обмотка ротора закорочена. К статору подводится пониженное напряжение, при котором ток имеет значение близкое к номинальному. Мощность короткого замыкания пойдет на покрытие потерь в стали и обмотках. При номинальном напряжении пусковой ток
Iп = (5 ¸ 7)Iн.
Используя данные режима холостого хода и короткого замыкания можно построить круговую диаграмму, а по ней определить рабочие характеристики работы двигателя при нагрузке.
2.3.3. Трехфазная асинхронная машина при вращающемся роторе
При рассмотрении этого вопроса мы увидим, что частота ротора, ЭДС и индуктивное сопротивление с изменением скорости вращения ротора не остаются постоянными. Запишем выражение ЭДС неподвижного ротора:

для вращающего ротора

где f2 – частота ЭДС ротора


тогда

т.е. ЭДС ротора при вращении равна ЭДС неподвижного ротора на скольжение и частота ротора равна частоте неподвижного ротора (f1) на скольжение.
Индуктивное сопротивление ротора при неподвижном состоянии

где L2– индуктивность фазы ротора
при вращающемся роторе


т.е. индуктивное сопротивление вращающегося ротора равно индуктивному сопротивлению при неподвижном роторе на скольжение.
Таким образом, видим, что частота, ЭДС и индуктивное сопротивление ротора зависят от скольжения. Теперь можно записать выражение для тока ротора:
 Ток ротора будет создавать магнитный поток.
Ток ротора будет создавать магнитный поток.
1) Посмотрим, с какой скоростью будет вращаться магнитный поток созданный током ротора I2 по отношению к ротору.
2) Посмотрим, с какой скоростью будет вращаться магнитный поток ротора по отношению к неподвижному статору т.к.

Видим, что поле ротора независимо от скольжения по отношению к неподвижному статору вращается с синхронной скоростью, а поле статора так же вращается с синхронной скоростью по отношению к неподвижному статору. Поэтому в пространстве поле статора и ротора неподвижны между собой. Только при этом условии возможно взаимодействие. Ток ротора создает намагничивающую силу  , по закону Ленца она направлена против намагничивающей силы статора. Поэтому уравнение н.с. запишется
, по закону Ленца она направлена против намагничивающей силы статора. Поэтому уравнение н.с. запишется
 .
.
При холостом ходе ток равен I0, по мере нагрузки E2 увеличивается, растет и I2 , увеличивается F2 и поток ротора, который размагничивает поток статор, что приводит к уменьшению ЭДС Е1 и к увеличению тока I1 до такой величины, чтобы скомпенсировать размагничивающий поток ротора и обеспечить постоянство потока.
2.3.4. Привидение параметров роторной обмотки к статорной
Под приведенной роторной обмоткой понимается такая эквивалентная роторная обмотка, которая имеет такое же число фаз, такое же число витков, как и обмотка статора.
Приведение параметров делают для того, что наглядно можно было представить все вектора токов и напряжений на векторной диаграмме и произвести количественный анализ процессов, которые происходят в асинхронной машине.


1) 
 - коэффициент трансформации по ЭДС
- коэффициент трансформации по ЭДС

2)  (полная мощность ротора до и после привидения должна быть неизменной)
(полная мощность ротора до и после привидения должна быть неизменной)
 ,
, 

где  - коэффициент трансформации по току.
- коэффициент трансформации по току.
3) (потери в роторе до и после приведения должны быть неизменными)
 ,
,

где  . Для двигателей с фазным ротором
. Для двигателей с фазным ротором 
 ,
, 
4)  (угол сдвига между ЭДС и током ротора до и после приведения должен быть неизменным)
(угол сдвига между ЭДС и током ротора до и после приведения должен быть неизменным)
 ,
, 

Соответственно  . Далее во всех схемах замещения и на векторных диаграммах будем использовать приведенные параметры ротора.
. Далее во всех схемах замещения и на векторных диаграммах будем использовать приведенные параметры ротора.
2.3.5. Приведение асинхронного двигателя к эквивалентному трансформатору
По физическому смыслу работа асинхронного двигателя аналогична трансформатору, поэтому его работу и приводят к режиму трансформатора. Но у асинхронного двигателя имеются отличия от трансформатора:
1) Ротор асинхронного двигателя вращается, а трансформатор неподвижный статический аппарат. Поэтому первой задачей будет приведение асинхронного двигателя к неподвижному состоянию.
Запишем выражение для тока ротора
 - ток во вращающемся роторе
- ток во вращающемся роторе
Разделим числитель и знаменатель на скольжение S, тогда
 - ток при неподвином роторе,
- ток при неподвином роторе,
т.к. его выразили через E2 и X2 – неподвижного ротора.
2.3.6. Схема замещения роторной цепи
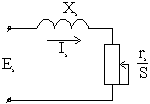
2) Асинхронный двигатель отдает с вала механическую мощность, а трансформатор электрическую. Решим эту задачу.
Представим
 Тогда схема замещения для роторной цепи будет иметь вид
Тогда схема замещения для роторной цепи будет иметь вид
Полная мощность, переданная на ротор равна E2I2.
В роторной цепи она теряется только на активных элементах. Сопротивление r2 обычно мало, поэтому мощность теряемая на сопротивлении

будет эквивалентна механической мощности, которую развивает двигатель.
Итак, работу асинхронного двигателя можно свести к работе трансформатора. Отсюда векторная диаграмма и схема замещения асинхронного двигателя будут аналогичны векторной диаграмме и схеме замещения трансформатора.
2.3.7. Векторная диаграмма асинхронного двигателя
Запишем основные уравнения ЭДС и токов для асинхронного двигателя и на основании этих уравнений построим векторную диаграмму.
1. 
2.  ,
,  ,
, 
 3. Выведем уравнение для токов
3. Выведем уравнение для токов
 ,
, 
Для двухслойной обмотки

 ,
,
тогда
,  ,
,
или
или
 ,
,
запишем иначе

На основании уравнений 1, 2, 3 построим векторную диаграмму для асинхронного двигателя. Из построения векторной диаграммы видно, что она во многом аналогична векторной диаграмме трансформатора при нагрузке.
2.3.8. Схемы замещения асинхронной машины
Для исследования работы асинхронной машины часто используются схемы замещения, которые должны отвечать основным уравнениям ЭДС и токов реальной машины.
Реально обмотки статора и ротора связаны электромагнитно. Схемы, где электромагнитная связь обмоток заменяется электрической, называются схемами замещения асинхронной машины. В теории асинхронных машин используются две схемы замещения: а) Т-образная; б) Г-образная.
Т-образная схема замещения.
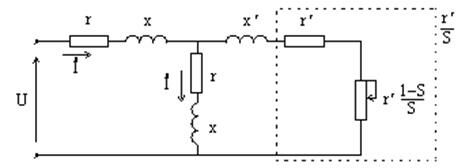
В этой схеме замещения сопротивления  в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
Поэтому в теории асинхронных машин чаще пользуются Г-образной схемой замещения. При переходе к Г-образной схеме замещения:
1) ток I1 должен оставаться неизменным, т.е. I1 = const.
2) Изменяя скольжение S = 0 ток  , т.е. ток
, т.е. ток  должен проходить по тем же сопротивлениям Z1 и Zm.
должен проходить по тем же сопротивлениям Z1 и Zm.
3) Кроме того параметры первичной обмотки и вторичной обмотки соответственно должны измениться на коэффициент С1 и  .
.
Г-образная схема замещения
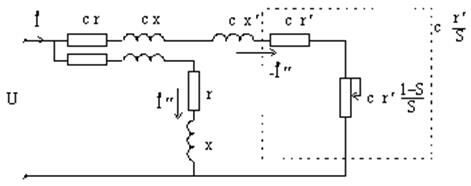
В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где  - комплексное число
- комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы
а, в Г-образной схеме ток
после преобразования получим
 ,
,
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на (см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
 ,
,
если подставить выражение тока  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим
 ,
,
тогда отношение токов

равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю  к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
Реально в машинах r1 и rm << rm и Xm. Если пренебречь сопротивлением r1 и rm, тогда коэффициент С1 примет вещественную величину
 ,
, 
Г-образная схема замещения широко используется для построения круговой диаграммы асинхронной машины, а также вывода формулы электромагнитного момента.
2.4. Вращающий момент асинхронной машины
 2.4.1. Вращающий (электромагнитный) момент асинхронной машины
2.4.1. Вращающий (электромагнитный) момент асинхронной машины
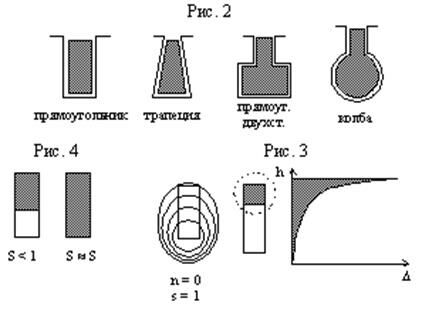
Для вывода формулы этого момента предварительно рассмотрим энергетическую диаграмму асинхронного двигателя (рис.1).
1. Активная потребляемая мощность из сети

2. В статоре имеются потери в обмотках

и магнитные потери Рмг, которые определяются из опыта холостого хода (см. рис.2).
3. Рэм – электромагнитная мощность
 ,
,
она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 - 3)Гц.
4. Потери в обмотке ротора Рэл2 определим ниже. Рмех – механические потери определяем из рис.2. Рдоб – добавочные потери принимаются равными 0,5% от Р1. Рмех - полная механическая мощность.

Мощность на валу

КПД - 
М - электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0 .
Выразим электромагнитную и полную механическую мощность через электромагнитный момент.
Pэм = M×w1,
где w1 - угловая скорость поля статора.
Pмех = M×w,
где w - угловая скорость ротора.
Потери в обмотке ротора

итак  .
.
Потери в меди (алюминии) обмотки ротора зависят от электромагнитной мощности и скольжения и прямо от параметров не зависят. Для уменьшения этих потерь номинальное скольжение должно быть как можно меньше.
Исходя из этого выражения, получим формулу электромагнитного момента
 , откуда
, откуда  (1).
(1).
Используя Г-образную схему замещения получим
 (2)
(2)
Подставив уравнение (2) в уравнение (1) получим
если  , тогда
, тогда
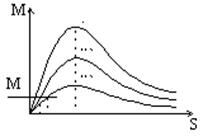
 . Зависимость M = f(S)
. Зависимость M = f(S)
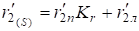
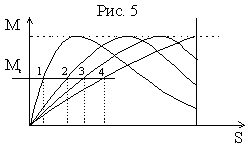
Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость электромагнитного момента от скольжения представлена на рис.3.
 Пояснение зависимости M = f(S).
Пояснение зависимости M = f(S).
Область от S = 0 ¸ Sкр
При малом скольжении X2S » 0, тогда ток в роторе  активному току, с увеличением S
активному току, с увеличением S 
 M
M
Момент зависит от потока и активной составляющей тока в роторе

В области Mmax начинает проявляться индуктивное сопротивление X2S.
Область скольжений S = Sкр ¸ 1
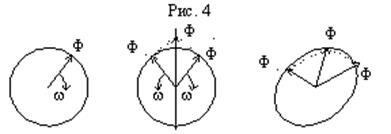
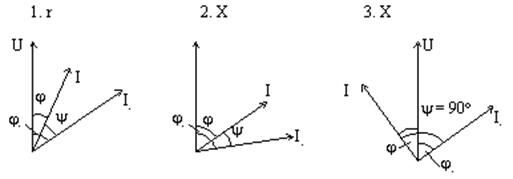
В этой области с увеличением скольжения S увеличивается индуктивное сопротивление ротора X2S = X2×S засчет которого увеличивается угол y2 между ЭДС  и током (см. рис. 4), активная составляющая при этом уменьшается, а cледовательно уменьшается и момент, т.е. S X2S
и током (см. рис. 4), активная составляющая при этом уменьшается, а cледовательно уменьшается и момент, т.е. S X2S 
 M¯
M¯
На рис.3 ток, при S = 1 равен пусковому, который в 5-7 раз больше номинального. При S = 0 ток I1 ¹ 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S = 0 ток ротора  , т.к.
, т.к. 
Кривая зависимости M = f(S) характеризуется тремя моментами:
а) Пусковой момент Мп при S = 1
б) Максимальный момент Мmax ® Sкр
в) Номинальный момент МН ® SН
Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью
2.4.2. Максимальный (критический) момент
Для определения максимального момента необходимо взять первую производную от М по S и приравнять к нулю
 .
.
Определим из полученного выражения критическое скольжение - Sкр соответствующего максимальному моменту
 , (1)
, (1)
обычно  , то
, то  ,
,
критическое скольжение определяется соотношением активного сопротивления ротора к суммарному индуктивному сопротивлению обмотки ротора и статора.
Если подставим выражение (1) в общее уравнение момента и сделаем необходимые преобразования, то получим выражение максимального момента.
Знак + - соответствует двигательному режиму
Знак - - соответствует генераторному режиму
При генераторном режиме 
 Из выражения Мкр видно, что величина максимального момента не зависит от активного сопротивления роторной цепи, но сильно оно влияет на его расположение. Если сопротивление роторной цепи увеличивать , то увеличивается Sкр и кривая момента смещается вправо
Из выражения Мкр видно, что величина максимального момента не зависит от активного сопротивления роторной цепи, но сильно оно влияет на его расположение. Если сопротивление роторной цепи увеличивать , то увеличивается Sкр и кривая момента смещается вправо
 ,
, 
Как видно из кривых, чем больше активное сопротивление в роторной цепи, тем больше пусковой момент и меньше пусковой ток. Это ценное свойство используется в двигателях с фазным ротором.
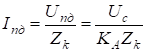
2.4.3. Расчетная формула момента
 Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
Запишем известное выражение момента
для вывода расчетной формулы используем нижнюю часть векторной диаграммы асинхронного двигателя
 ,
,  ,
,  ,
, 
тогда
тогда  , т.е. момент зависит от потока и активной составляющей тока ротора.
, т.е. момент зависит от потока и активной составляющей тока ротора.
2.4.4. Влияние высших гармоник магнитного поля на работу асинхронной машины
Высшие гармоники магнитного поля возникают:
a) вследствие ступенчатого распределения намагничивающей силы статора и ротора;
б) зубчатого строения поверхности статора и ротора;
в) неравномерным насыщением магнитной цепи машины.
Вращающие моменты, обусловленные высшими гармониками поля, могут быть разбиты на три группы:
1. Асинхронные
2. Синхронные
3. Вибрационные
1. Асинхронные моменты, cозданные высшими гармониками магнитного поля.
Гармонические магнитного поля, имеющие пространственный период меньше 2t могут возникать в асинхронной машине как в результате несинусоидальности намагничивающих сил, так и вследствие зубчатости воздушного зазора. Высшие гармоники поля передвигаются в направлении движения ротора и создаются током статора. Это поле наводит в обмотке ротора ЭДС и ток соответствующей частоты, который создает магнитное поле, передвигающееся по поверхности ротора, и вращается в воздушном зазоре синхронно с полем статора. Магнитные поля статора и ротора будут иметь одинаковые пространственные периоды и создадут результирующее поле. Это поле взаимодействуя с током в роторе создает вращающий момент, который по его природе следует рассматривать как асинхронный. Высшие гармоники поля создают соответствующие моменты, которые искажают момент от первой гармоники поля.
Рассмотрим влияние 5 и 7 гармоники поля на момент от первой гармоники поля
 ,
, 
седьмая гармоника поля вращается в сторону первой гармоники
 ,
, 
пятая гармоника поля вращается против первой гармоники.
Асинхронные моменты, обусловленные высшими гармониками поля могут быть ослабленны за счет рационального размещения зубцов в слое обмоток статора и ротора (Z1 и Z2). Обеспечение синусоидальности намагничивающей силы и максимального снижения зубцовых гармоник.
2. Cинхронные моменты от высших гармоник магнитного поля.
Не все высшие гармонические магнитного поля, созданные статором и ротором сцепляются с обеими обмотками и образуют асинхронные вращающие моменты. Это особенно характерно для зубцовых высших гармоник. При определенных скоростях вращения ротора отдельные гармонические зубцового поля статора могут двигаться синхронно с соответствующими гармоническими зубцового поля статора. Под действием магнитных сил в этом случае возникают механические воздействия между статором и ротором и создаются синхронные моменты для какого-то одного значения скольжения. При этом пространственный период основной зубцовой гармоники статора и ротора должен быть одинаков. То есть
![]() т.е. при
т.е. при ![]()
 т.е. при
т.е. при 
синхронные моменты будут сильно проявляться.
Синхронные моменты могут быть ослаблены за счет скоса и правильного выбора соотношений зубцов статора и ротора.
3. Вибрационные силы и моменты
Зубцовые и другие магнитные поля статора ротора, образующие синхронные моменты, проявляющиеся не только при взаимном синхронном их вращении, но и при любых других скоростях вращения. В этом случае они образуют периодически меняющиеся вращающиеся моменты, которые в течение одного полупериода направлены в сторону вращения ротора, а в течении другого полупериода в обратном направлении. Такие периодически меняющиеся моменты могут создавать вибрации ротора и статора, которые становятся особенно заметными при наличии резонансных явлений. При неблагоприятных соотношениях зубцов статора и ротора могут возникнуть не только тангенциальные, но так же и радиальные магнитные силы притяжения, действующие на статор и ротор и перемещающиеся вдоль окружности воздушного зазора при вращении ротора, эти силы вызывают вибрацию машины.
Анализ этих процессов показывает, что вибрационные силы и моменты проявляются особенно сильно, если


![]() 2.5. Круговая диаграмма асинхронной машины
2.5. Круговая диаграмма асинхронной машины
 2.5. Круговая диаграмма асинхронной машины
2.5. Круговая диаграмма асинхронной машиныРабочие и другие характеристики асинхронного двигателя, определяющие рабочие свойства машины, могут быть получены:
1. Путем непосредственной нагрузки.
2. Расчетным путем (определение параметров и расчет характеристик).
3. Косвенный метод (по данным опыта холостого хода и короткого замыкания). Используя данные опыта холостого хода и короткого замыкания можно построить упрощенную круговую диаграмму, а из нее получить данные для построения рабочих характеристик.
Из Г–образной схемы замещения
![]() ,
, ![]()
 ,
, 
Обозначим в рабочей ветви
![]() ,
, ![]() ,
, ![]() ,
, ![]()
 ,
,  ,
,  ,
, 
тогда
ток - 
Геометрическим местом тока является окружность.
Построение круга диаграммы.
Из опыта холостого хода для UН находим
Р0 и I0, I0 =  ,
,  ,
, 
и определяем  ,
, 
а по ним строится вектор тока хх – I0, задавшись масштабом тока mI (A/см)
Для построения точки А, где S = 1 приводим ток Iк, мощность Рк и Cosjк к номинальному напряжению Iп ® Uн. Из рис. 2
 , откуда
, откуда 
 ,
,  ,
,
Откладываем отрезок  ,
,  получаем точку А. Соединив точку А с О получим хорду окружности. Опуская перпендикуляр из середины хорды до линии
получаем точку А. Соединив точку А с О получим хорду окружности. Опуская перпендикуляр из середины хорды до линии  получим центр окружности
получим центр окружности  .
.
Построение линии OF. Определение точки В.
 ,
,  , r1 - известно
, r1 - известно
откуда отрезок  .
.
Получим точку В. Соединив точку О с В и продлив до окружности получим точку F где S = ±¥. Мощность  , т.е.
, т.е.
 ,
, 
Задавшись mI, определим масштаб мощности
Тогда мощность
 ,
,  ,
, 
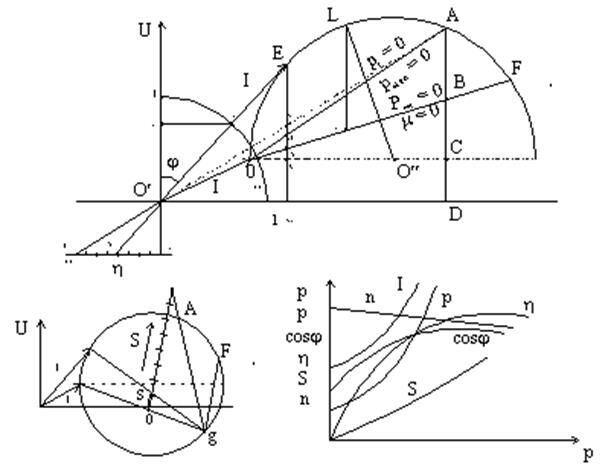
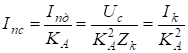
Как получить данные из круговой диаграммы для построения рабочих характеристик?
P1, I1, h, Cosj1, S, n = f(P2)
Задавшись током I1
I1 = (0,25; 0,5; 0,75; 1,0; 1,25) Iн
Табл. 1
| I1 = | 0,25 | 0,5 | 0,75 | 1,0 | 1,25 |
| p1 | |||||
| p2 | |||||
| Cos j1 | |||||
| S | |||||
| n | |||||
| h |
Для каждого значения тока I1 определяем (1-6) и сводим в таблицу 1. По данным таблицы строятся рабочие характеристики
1. 
2.
3. 
4. S =
5. 
6. 
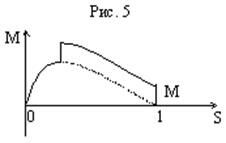
 ,
, 
и сводим в таблицу 1. По данным таблицы строятся рабочие характеристики. Скольжение определяется по рис.5.
2.6. Пуск трехфазных асинхронных двигателей
Основные величины, которые определяют режим пуска, являются пусковой ток Iп и пусковой момент Мп. При пуске возникают большие токи, которые снижают напряжение в сети, а у асинхронных двигателей  . В короткозамкнутых асинхронных двигателях
. В короткозамкнутых асинхронных двигателях  , Мп мал у двигателей с фазным ротором
, Мп мал у двигателей с фазным ротором  , Мп - большой. При тяжелых условиях пуска применяют двигатель с фазным ротором.
, Мп - большой. При тяжелых условиях пуска применяют двигатель с фазным ротором.
Способы пуска.
1. Пуск под номинальным напряжением.
2. Пуск при пониженном напряжении:
а) Реакторный
б) Автотрансформаторный
в) Пуск посредством переключения обмотки статора со звезды на треугольник
3. Пуск двигателя с фазным ротором.
2.6.1. Пуск под номинальным напряжением (прямой пуск)
Прямой пуск асинхронных двигателей простой и нет необходимости в дополнительной аппаратуре.
Недостатки:
а) большие пусковые токи, что снижает напряжение в сети, а
б) большие ударные электромагнитные моменты
в) большие динамические усилия возникают в обмотках статора.
Поэтому асинхронные двигатели большой мощности пускаются при пониженном напряжении.
2.6.2. Пуск при пониженном напряжении
а) реакторный способ пуска
 При пуске для ограничения пускового тока в фазы двигателя включается сопротивление реактора, т.е.
При пуске для ограничения пускового тока в фазы двигателя включается сопротивление реактора, т.е.
 ,
,
часть напряжения падает на реакторе, а на двигатель подается пониженное напряжение. После разгона асинхронного двигателя ток в статоре уменьшится, уменьшится падение напряжения на реакторе. Напряжение на двигателе возрастет. Затем замыкают контакторы К и двигатель подключается на полное напряжение.
Обозначим
 - коэффициент допустимой кратности,
- коэффициент допустимой кратности,
 ,
,
пусковой момент
 .
. 
 т.е. если уменьшить ток в 2 раза (Кпс), момент уменьшиться в 4 раза. Это является недостатком реакторного способа пуска.
т.е. если уменьшить ток в 2 раза (Кпс), момент уменьшиться в 4 раза. Это является недостатком реакторного способа пуска.
б) автотрансформаторный способ пуска
 ,
, 
Отсюда мы видим, что если пусковой ток уменьшается в  раз, то и момент пусковой во столько же раз, т.е. чем при реакторном пуске.
раз, то и момент пусковой во столько же раз, т.е. чем при реакторном пуске.
Порядок пуска: замыкается контактор К1, подается напряжение на автотрансформатор, двигатель при этом пускается при пониженном напряжении. После разгона размыкается контактор К1, и автотрансформатор работает как реактор, затем замыкается контактор К2 и на двигатель подается полное напряжение.
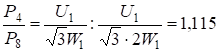
в) пуск посредством переключателя обмотки статора со звезды на треугольник.
 При пуске обмотка статора соединена в звезду, фазное напряжение меньше линейного на
При пуске обмотка статора соединена в звезду, фазное напряжение меньше линейного на  , поэтому пусковой ток уменьшится. После разгона двигателя обмотку статора переключают в треугольник. При соединении обмотки статора в звезду пусковой ток и пусковой момент уменьшаются в 3 раза по сравнению с пуском при соединении обмотки статора в треугольник.
, поэтому пусковой ток уменьшится. После разгона двигателя обмотку статора переключают в треугольник. При соединении обмотки статора в звезду пусковой ток и пусковой момент уменьшаются в 3 раза по сравнению с пуском при соединении обмотки статора в треугольник.
 ,
,  ,
, 
отнесем
 ,
,  ,
, 
необходимо учитывать, что при пуске момент уменьшается в 3 раза.
 2.6.3. Пуск двигателя с фазным ротором
2.6.3. Пуск двигателя с фазным ротором
Пуск этого двигателя происходит при полном напряжении. Но за счёт введения активного сопротивления в роторную цепь увеличиваем пусковой момент и уменьшаем пусковой ток.
Пуск производится в несколько ступеней. Это делается для того, чтобы уменьшить время пуска.
2.7. Асинхронные двигатели с обмоткой ротора специального исполнения
Как было установлено, что одним из способов улучшения пусковых характеристик асинхронного двигателя является повышение активного сопротивления в цепи ротора.
Однако наличие пусковых сопротивлений, переключающих устройств, контактных колен, повышает стоимость, снижает надёжность и усложняет эксплуатацию. Эти недостатки можно избежать, применяя роторы специального исполнения, имеющие К.З. обмотки в виде беличьей клетки, активные и индуктивные сопротивления которых меняются в процессе пуска в ход. по мере разбега с изменением частоты. В роторах подобных конструкций используется эффект вытеснения тока.
Вообще для асинхронных двигателей необходимо отметить такое противоречие:
 Если активное сопротивление в роторе большое, то пусковой момент большой, а ток пусковой ограничен, т.е. получаются хорошие пусковые характеристики, а рабочие характеристики получаются плохими, т.к. при том же моменте сопротивления на валу, скольжение возрастёт, а это приведёт к ухудшению рабочих характеристик. И наоборот, если активное сопротивление ротора будет малым, то рабочие характеристики будут хорошими (скольжение мало), пусковые характеристики плохими (см. рис.1).
Если активное сопротивление в роторе большое, то пусковой момент большой, а ток пусковой ограничен, т.е. получаются хорошие пусковые характеристики, а рабочие характеристики получаются плохими, т.к. при том же моменте сопротивления на валу, скольжение возрастёт, а это приведёт к ухудшению рабочих характеристик. И наоборот, если активное сопротивление ротора будет малым, то рабочие характеристики будут хорошими (скольжение мало), пусковые характеристики плохими (см. рис.1).
Асинхронные двигатели с обмоткой ротора специального исполнения решают эти противоречия компромиссно.
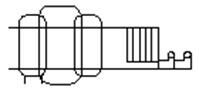
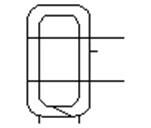
2.7.1. Короткозамкнутый асинхронный двигатель с глубоким пазом на роторе
В этой конструкции стержни заложены в пазы ротора, имеют большие радиальные размеры по сравнению с шириной. Конструкции стержней имеют следующий вид:
Идея эффекта вытеснения тока в стержне следующая:
При пуске n = 0, скольжение = 1, а частота в роторе f2 = f1.
Ток в стержне созданный основной ЭДС будет иметь поля рассеяния, которые будут изменяться с частотой = 50 Гц и наводить в нижней части стержня (проводник находиться в железе) ЭДС, которая создает вихревые токи направленные встречно основному току и будут вытеснять его на периферию (к зазору), (рис.3). Площадь прохождения уменьшается, а это приведет к увеличению активного сопротивления, а индуктивное сопротивление стержня уменьшится, т.к. магнитная проводимость полем рассеяния уменьшается, это приводит к улучшению пусковых характеристик.
При S = Sн плотность тока в стержне распределится равномерно.
По мере разгона ротора частота f2 уменьшается, а следовательно и частота пересечения стержня полями рассеяния уменьшится. Уменьшатся вихревые токи и основной ток будет глубже проникать в стержень.
При скольжении S = Sн частота f2 = 2-3 Гц и влиянием потоков рассеяния можно пренебречь и ток в стержне ротора будет проходить по всей площади стержня, что приведет к тому, что активное сопротивление ротора будет малым, а это приведет к тому, что рабочие характеристики будут благоприятными.
Обычно сопротивление r2 возрастает в 3-4 раза, а индуктивное сопротивление снижается на 30-40% при S = 1.
При клинообразной форме стержня эффект вытеснения проявляется в большей степени, т.е. r2 возрастает сильнее, вытеснение тока проявляется только в стержне пазовой части. Активные и индуктивные сопротивления роторной цепи запишутся:

где  ,
,  - сопротивления при S = Sн; Kr - коэффициент увеличения активного сопротивления при S = 1; Kx - коэффициент снижения индуктивного сопротивления при S = 1.
- сопротивления при S = Sн; Kr - коэффициент увеличения активного сопротивления при S = 1; Kx - коэффициент снижения индуктивного сопротивления при S = 1.
где 
x - приведенная высота стержня
h - высота стержня
вст - ширина стержня
вп - ширина паза
f2 - частота ЭДС ротора
r - удельное сопротивление материала ротора.
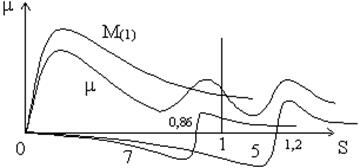
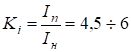
На рис.5 представлено изменение активного и индуктивного сопротивления обмотки ротора при изменении S = 1 ¸ 0.
Так как параметры  ,
,  переменны для различных скольжений, то геометрическим методом тока I, не будет окружность, а будет сплошной кривой представленной на рис.6.
переменны для различных скольжений, то геометрическим методом тока I, не будет окружность, а будет сплошной кривой представленной на рис.6.
Следует отметить, что за счет большего рассеяния роторной обмотки Cosj1н и перегрузочная способность меньше, чем у двигателей с круглым стержнем на роторе.
Кратность пускового тока
Кратность пускового момента
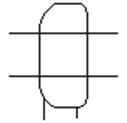
2.7.2. Короткозамкнутый асинхронный двигатель с двойной клеткой на роторе
Принцип работы: При пуске работает пусковая обмотка, обладающая большим активным сопротивлением, что улучшает пусковые характеристики ( ). При скольжении S » Sн работает рабочая обмотка, имеющая малое активное сопротивление, что обеспечивает хорошие характеристики.
). При скольжении S » Sн работает рабочая обмотка, имеющая малое активное сопротивление, что обеспечивает хорошие характеристики.
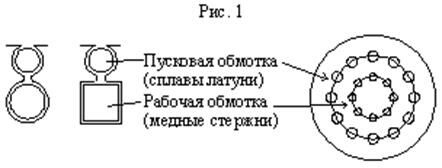
Идея: При пуске в ход (f2 » f1) индуктивное сопротивление нижней клетки значительно больше, чем верхней, так как она расположена глубже в пазу, поэтому пусковой ток ротора будет проходить главным образом по верхней клетке, обладающей большим активным сопротивлением, это обеспечивает большой пусковой момент и пониженный пусковой ток. По мере разбега двигателя частота f2 уменьшается, и ток постепенно перераспределяется между клетками. При малых скольжениях индуктивное сопротивление обмоток ротора ничтожно малы и токи в клетках распределяются обратно пропорционально их активным сопротивлениям. Поэтому основной ток в роторе проходит преимущественно по рабочей обмотке, имеющей меньшее активное сопротивление. При малом активном сопротивлении роторной обмотки рабочие характеристики получаются хорошими.
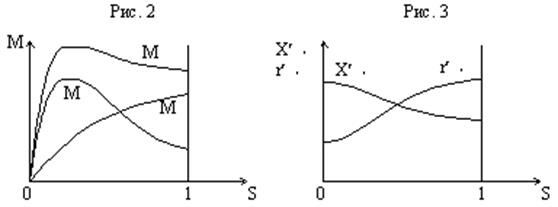
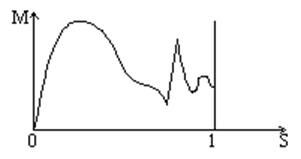
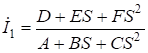
На рис.2 представлено изменение моментов пусковой и рабочей обмотки, а также суммарного момента при S = 1¸0. На рис.3 показано изменение эквивалентных сопротивлений  ,
,  роторной цепи при S = 1¸0. Так как параметры роторной цепи при изменении скольжения изменяются, то геометрическим местом конца вектора тока I не будет окружность, будет представлять собой сложную кривую.
роторной цепи при S = 1¸0. Так как параметры роторной цепи при изменении скольжения изменяются, то геометрическим местом конца вектора тока I не будет окружность, будет представлять собой сложную кривую.
Если параметры схемы замещения выразить через постоянные коэффициенты, то ток статора можно представить следующим выражением:
 ниже покажем геометрическое место конца вектора I.
ниже покажем геометрическое место конца вектора I.
Конструкция двигателя сложнее, но он обладает большим пусковым моментом, поэтому применяется там, где необходимы повышенные пусковые моменты (транспортеры, дробилки, шаровые машины и т. д.).
Кратность пускового тока:
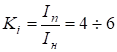
Кратность пускового момента
 Cosjн и перегрузочная способность этого двигателя ниже, чем у двигателя с одной клеткой (круглой) на роторе, т.к. магнитное рассеяние в роторе больше, чем у одной обмотки.
Cosjн и перегрузочная способность этого двигателя ниже, чем у двигателя с одной клеткой (круглой) на роторе, т.к. магнитное рассеяние в роторе больше, чем у одной обмотки.
Характер изменения момента (механические характеристики) для различных двигателей показан на рис.5.
У двигателей с глубоким пазом и с двойной клеткой Мкр уменьшается из-за большого магнитного рассеяния на роторе.
2.8. Регулирование частоты вращения асинхронных двигателей
Для асинхронного двигателя частота вращения ротора определяется по формуле
, или  ,
,
откуда видно, что скорость вращения ротора можно регулировать:
1. f = var - изменять частоту подводимого напряжения.
2. p = var - изменять число пар полюсов.
3. S ¬ r2 - изменять скольжение:
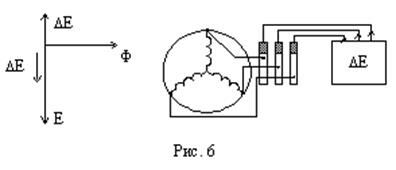
DE
а) сопротивлением r2 в цепи ротора.
б) введением DE в роторную цепь.
2.8.1. Регулирование частоты вращения двигателя изменением частоты
Для регулирования частоты вращения асинхронного двигателя необходим преобразователь частоты. При регулировании необходимо стремится к тому, чтобы с изменением частоты не ухудшались рабочие характеристики. Для чего необходимо, чтобы с изменением частоты f поток оставался постоянным
( )
)  ,
,
 т.е. при регулировании частоты одновременно необходимо регулировать и напряжение. Регулирование скорости с условием
т.е. при регулировании частоты одновременно необходимо регулировать и напряжение. Регулирование скорости с условием

является экономичным. Для поддержания lm, Cosj, h, как показали исследования можно достичь этого, если выполняется условие
 .
.
Регулирование изменением частоты происходит плавно. На рис.1 представлены механические характеристики при различных значениях частоты.
2.8.2. Регулирование частоты вращения двигателя путем изменения числа пар полюсов
Это способ регулирования является ступенчатым. Переключение производится обмоткой статора с одной синхронной скорости на другую. Обычно ротор при этом короткозамкнутый.
Наибольшее распространение получили обмотки с переключением числа полюсов 1:2. Кроме того, имеются обмотки разработанные Харитоновым для станков, которые переключают число полюсов как 1:2, так и отличных от этого соотношения. Кроме того, в промышленности используются обмотки на принципе - Полюсной амплитудной модуляции, разработанной англичанином Райклифом. Мы рассмотрим обмотки только при переключении числа полюсов 1:2.
Обычно регулирование производится на две, три, четыре ступени. Обычно на статоре укладывается либо одна обмотка с переключением, либо две с переключением на четыре скорости. Это дает возможность увеличить пределы регулирования, но понижает использование машины, поскольку работает одна обмотка.
Требования к обмотке.
1. Схема обмотки должна иметь минимальное число переключаемых элементов.
2. На всех ступенях насыщение магнитной системы машины не должно превышать допустимых значений.
3. Обмоточные коэффициенты на всех ступенях вращения должны быть достаточно высокими.
4. При включении обмотки не должны возникать значительные отрицательные асинхронные и синхронные вращающие моменты и вибрационные силы, обусловленные высшими гармониками магнитного поля.
5. Для каждой ступени устанавливается определенная мощность по нагреву.
6. Направление вращения ротора должно быть неизменным.
 Выполнить эти условия сложно и не всегда разрешимо.
Выполнить эти условия сложно и не всегда разрешимо.
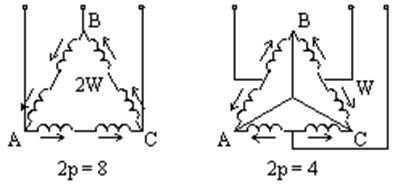
Принцип переключения числа полюсов основан на том, что изменяя поток в одной из полуфаз обмотки изменяется число полюсов. Этот принцип продемонстрирован на рис. 1.
Электромагнитная мощность для любого числа Р обмотки статора определяется соотношением
 ,
,  ,
,
пользуясь этим соотношением, проанализируем работу нескольких схем.
1. Y/Y - 8/4
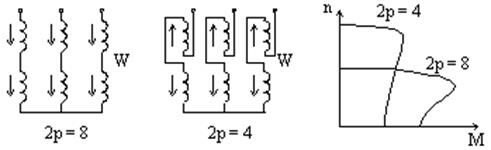

Работа при Р = const

2. Y/YY - 8/4
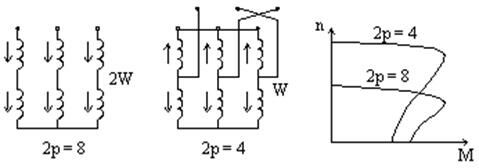
3. D/YY - 8/4
Работа при постоянной мощности
Р = const
2.8.3. Регулирование частоты вращения двигателя сопротивлением в цепи ротора (с фазным ротором)
Как известно, если увеличивать r2 в цепи ротора, то скольжение, при постоянном моменте сопротивления, возрастает, а скорость уменьшается (рис.5).
Потери в роторной цепи P = PэмS, т.е. при глубоком регулировании потери Pэм возрастают, а в двигателе большой мощности это не допустимо. Поэтому в двигателях большой мощности регулирование частоты вращения производят за счет введения DЕ в роторную цепь. При любом скольжении ЭДС DЕ должна иметь ту же частоту, что и основная ЭДС Е2S роторной обмотки. Идея регулирования сводится к тому, что если DЕk направлена встречно с Е2S, то скорость уменьшается, а если согласно с Е2S, то скорость увеличивается.
2.8.4. Регулирование частоты вращения изменением подводимого напряжения
Этот способ регулирования не дает больших результатов. Диапазон регулирования получается небольшим (см. рис.7).
В практике используются различные импульсные способы регулирования частоты вращения на базе тиристоров.
2.9. Асинхронная машина в качестве генератора
В качестве самостоятельного генератора асинхронная машина употребляется очень редко.
Этот режим встречается в период торможения двигателей. Но иногда асинхронная машина используется в генераторном режиме. В этом режиме асинхронная машина может работать либо в тормозном режиме, при этом для создания потока используется энергия сети, либо в автономном режиме с использованием емкости для самовозбуждения.
Обычно синхронный генератор потребляет из сети реактивную мощность для создания магнитного потока. Чтобы перевести асинхронную машину в генераторный режим, ее нужно разгрузить, а затем вращать ротор со скоростью выше синхронной (n > n1), при этом скольжение становится отрицательным. Фаза ЭДС ротора изменяется на 180°. Это приводит к тому, что активная составляющая тока ротора изменит свой знак, а реактивная составляющая оставит свое направление, т.к. независимо от режима машиной потребляется реактивная мощность для создания магнитного потока.
Докажем это аналитически. Ток в роторе
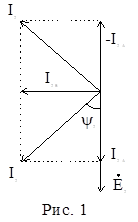
, из рис.1. ток  ,
,  тогда
тогда  , т.е. S < 0,
, т.е. S < 0,
то активная составляющая тока ротора изменит свой знак.
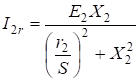
Реактивная составляющая тока ротора I2r не изменит своего знака при переходе машины в генераторный режим.
 ,
,  ,
, 
2.9.1. Векторная диаграмма асинхронного генератора

Из векторной диаграммы видно, что активная составляющая тока в роторе, а следовательно и активная составляющая тока в статоре изменили свой знак.
2.9.2. Однофазный двигатель
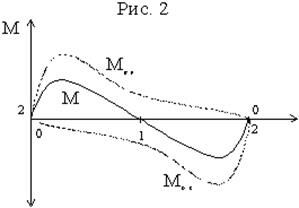
 Однофазный асинхронный двигатель по своим рабочим характеристикам уступает 3х фазному. Но он имеет то преимущество, что питается от однофазной сети. У однофазного двигателя в пазах статора укладываются две обмотки сдвинутые в пространстве на 90° эл. градусов. Но вторая (пусковая обмотка) используется только на период пуска, после чего она отключается. Ротор обычно короткозамкнутый. Однофазная обмотка создает пульсирующий магнитный поток, который можно разложить на прямой поток и обратный. При пуске (n = 0) моменты от прямого и обратного потока равны и противоположны. По этому пусковой момент Мп = 0. Если сдвинуть ротор по направлению прямого поля, то ротор разгонится до скорости близкой к скорости поля Фпр.
Однофазный асинхронный двигатель по своим рабочим характеристикам уступает 3х фазному. Но он имеет то преимущество, что питается от однофазной сети. У однофазного двигателя в пазах статора укладываются две обмотки сдвинутые в пространстве на 90° эл. градусов. Но вторая (пусковая обмотка) используется только на период пуска, после чего она отключается. Ротор обычно короткозамкнутый. Однофазная обмотка создает пульсирующий магнитный поток, который можно разложить на прямой поток и обратный. При пуске (n = 0) моменты от прямого и обратного потока равны и противоположны. По этому пусковой момент Мп = 0. Если сдвинуть ротор по направлению прямого поля, то ротор разгонится до скорости близкой к скорости поля Фпр.
Его скорость n = n1(1 - S) по отношению к прямому полю. Скорость вращения обратного поля относительно ротора определится:
 ,
,
т.е. обратное поле по отношению к ротору вращается почти с двойной скоростью. Отсюда индуктивное сопротивление ротора от обратного поля  будет большим, а активная составляющая тока в роторе будет малой и момент от обратного поля будет малым. А момент от прямого поля будет большим, т.к. скольжение при пуске уменьшается, уменьшается Х2пр, а следовательно активная составляющая от прямого поля будет возрастать и момент так же возрастет, что подтверждается на кривых момента от прямого и обратного поля.
будет большим, а активная составляющая тока в роторе будет малой и момент от обратного поля будет малым. А момент от прямого поля будет большим, т.к. скольжение при пуске уменьшается, уменьшается Х2пр, а следовательно активная составляющая от прямого поля будет возрастать и момент так же возрастет, что подтверждается на кривых момента от прямого и обратного поля.
 Из рис.2 видно, что при S = 1 пусковой момент равен нулю (Мп = 0).
Из рис.2 видно, что при S = 1 пусковой момент равен нулю (Мп = 0).
Для создания пускового момента используется пусковая обмотка. Обмотка возбуждения и пусковая обмотка создают вращающееся магнитное поле, которое наводит в обмотке ротора ЭДС и ток, и создается асинхронный момент.
При пуске включается пусковая обмотка и создается асинхронный момент, после разгона ротора пусковая обмотка отключается ключом К.
Условия создания кругового поля двумя обмотками:
1. Обмотки в пространстве должны быть сдвинуты на 90°.
2. Токи и потоки в обмотках должны быть сдвинуты во времени на 90°.
3. Намагничивающие силы обмоток должны быть равны FА = FВ
При невыполнении одного из них поле будет эллиптическим.
На рис.5 представлена зависимость момента от скольжения с учетом пусковой обмотки.
Обратите внимание на лекцию "23 Постановка граничных условий в классической теории оболочек".
Представим диаграммы токов обмоток при различных фазосдвигающих элементах.
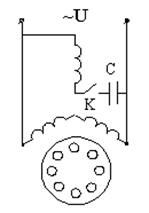
Использование 3х фазного двигателя в однофазном режиме.
 , мкФ
, мкФ