
Назначение и области применения системы автоведения
1. Назначение и области применения системы автоведения. Принципы оптимального управления ЭПС.
2. Алгоритмы и программы автоматического управления ЭПС.
3. Точность движения поездов при автоведении.
4. Автономные системы автоведения электропоездов, пассажирских и грузовых поездов.
5. Системы телемеханического управления ЭПС.

Автоматическое управление поездами позволяет увеличить пропускную способность наиболее загруженных участков, так как при этом повышается точность выполнения графика движения и улучшается использование тяговых свойств локомотивов; при автоматическом управлении машинист может уделять большее внимание обеспечению безопасности движения поезда.
Обычно автоматическое управление поездом осуществляют три взаимосвязанные системы: система безопасности движения, обеспечивающая установленные межпоездные интервалы и допустимые скорости движения, система тягово-тормозной автоматики, регулирующая силы тяги и торможения с целью наиболее полного использования мощности локомотива и сцепления колес с рельсами; система автоведения (автомашинист), регулирующая с заданной точностью время хода поезда в соответствии с графиком движения при экономном расходе электроэнергии и полном использовании пропускной способности. Система автоведения должна выполнять свои функции под контролем систем безопасности движения и тягово-тормозной автоматики.
В качестве системы безопасности движения на отечественном ЭПС преимущественно применяют автоматическую локомотивную сигнализацию непрерывного типа с контролем скорости (АЛСН).
Рекомендуемые материалы
Системы тягово-тормозной автоматики предусматривают автоматическое регулирование силы тяги при пуске и тормозной силы при остановке пригородных электропоездов и поездов метрополитена. Все шире устройства автоматики применяют и для электровозов.
Наиболее благоприятны условия внедрения систем автоведения на метрополитене. Этому способствует единообразие режимов движения поездов на коротких перегонах, постоянство метеорологических условий, отсутствие на пути людей, животных и др. С другой стороны, несмотря на небольшую протяженность такие системы должны обеспечивать высокую точность управления.
Условия работы пригородных поездов также достаточно благоприятны для автоведения, хотя и не так стабильны как на метрополитене. Осуществить применение систем автоведения на электровозах значительно сложнее. Здесь режимы ведения поездов необходимо дифференцировать в зависимости от веса и длины поезда, которые изменяются в широких пределах. При длинносоставных поездах надо учитывать влияние переломов профиля. Поэтому система автоматического управления должна охватывать наиболее часто повторяющиеся и легко формализуемые операции, выполнение которых заметно влияет на время хода поезда по участку и на расход энергии. К ним относится:
– регулирование скорости поезда;
– торможение на спусках;
– торможение перед входными сигналами.
Условия работы пассажирских электровозов более благоприятны для внедрения автоматизации: более стабильный вес поезда, его небольшая длина, меньшая склонность к буксованию, применение электропневматических тормозов.
Принципы оптимального управления ЭПС. Состояние поезда как объекта управления в каждый момент времени характеризуется, как известно из курса «теория электрической тяги», скоростью v, пройденным путем S и затраченным временем t. Совокупность величин v, S, t можно назвать координатами движения поезда.
Наибольшие допустимые значения координат движения поезда или их производных по времени (скорость, ускорение, темп изменения ускорения) называют ограничениями. Ограничения можно разделить на безусловные, зависящие только от основных характеристик поезда и потому неизменные для рассматриваемого поезда, и условные, связанные с конкретными условиями движения. К ним можно отнести:
– ограничения скорости по условиям безопасности движения;
– ограничение пускового ускорения и тормозного замедления по сцеплению;
– ограничение нарастания ускорения и замедления по условиям комфорта.
Обеспечение необходимых значений координат движения поезда назовём целью управления.
Цель управления поездом можно сформулировать в виде трёх условий:
S = Sз; v = vзк; t = Тз,
где Sз – заданный путь (длина перегона); Тз – заданное время хода по перегону; vзк – заданная скорость в конце перегона.
Поставленная цель управления поездом можно достигнута несколькими способами, отличающимися разными фазовыми траекториями (кривыми движения) и расходом энергии на тягу.
Обычно задачи оптимального управления решают или вариационным методом (Л.Эйлера), или по принципу максимума (Л. С. Понтрягина), или же методом динамического программирования (Р. Беллмана). Во всех этих случаях определяют фазовые траектории, соответствующие экстремальному значению критерия оптимальности. Непосредственное применение этих методов для решения поставленной задачи даёт фазовую траекторию с частыми переключениями режимов работы локомотива.
Если отклонения от оптимальной кривой движения поезда невелики, они не приводят к существенному увеличению расхода энергии. Поэтому целесообразно ограничиться выбором квазиоптимальной кривой, при  которой возможно обеспечить небольшое количество переключений с одного на другой режим работы локомотива. При этом расход энергии близок к теоретически минимальному. Кривая движения поезда на перегоне постоянного профиля состоит из четырёх участков: разгона с наибольшим допустимым ускорением, движения с постоянной скоростью, выбега и торможения с заданным замедлением (см. рис. 10.1). Такая форма диаграммы справедлива и тогда, когда начальная и конечная скорости не равны нулю, т.е. при проследовании станции без остановки.
которой возможно обеспечить небольшое количество переключений с одного на другой режим работы локомотива. При этом расход энергии близок к теоретически минимальному. Кривая движения поезда на перегоне постоянного профиля состоит из четырёх участков: разгона с наибольшим допустимым ускорением, движения с постоянной скоростью, выбега и торможения с заданным замедлением (см. рис. 10.1). Такая форма диаграммы справедлива и тогда, когда начальная и конечная скорости не равны нулю, т.е. при проследовании станции без остановки.
На коротких перегонах в условиях пригородного движения и метрополитена режим движения с постоянной скоростью отсутствует, а на длинных перегонах – это один из основных режимов движения поезда. Снижение заданного времени хода приводит к сокращению длины участка движения с постоянной скоростью (кривые для времени Т1 и Т2 на рис. 10.1). Если время хода мало (Т3 и Т4), то этот участок отсутствует. При минимальном возможном времени Т5 диаграмма движения содержит только два участка: разгон с максимально возможным ускорением и торможение с заданным замедлением.
Повышение скорости поезда vн в начале и vк в конце перегона приводит соответственно к уменьшению длин участков разгона или торможения. Перегон, имеющий п различных элементов профиля, можно рассматривать как п перегонов постоянного профиля с ненулевой скоростью в точках изменения профиля.
Для автоматической реализации квазиоптимального управления необходимы автоматические системы пускового, тормозного регулирования и поддержания постоянной скорости. Эти системы относятся к внутренней тягово-тормозной автоматике ЭПС.

Процесс управления поездом заключается в преобразовании информации о цели управления и координатах движения поезда в информацию о необходимых управляющих воздействиях. Систему формальных правил, по которым производится это преобразование, называют алгоритмом управления поездом. Информацию одели управления можно представить в виде заданных значений координат движения Sз, vз, Тз, или в виде зависимостей между ними, которые называют программой управления поездом.
По характеру преобразования информации в процессе управления различают следующие виды алгоритмов: алгоритмы без обратной связи (разомкнутые), предполагающие контроль только одной координаты движения поезда – команда управления подается, когда контролируемая величина превышает заданное значение; алгоритмы со ступенчатой корректировкой, предусматривающие изменение заданного значения основной координаты движения g1, на некоторую заданную постоянную величину Δg1 если корректирующая координата у2 отклонится от заданного значения g2 в контрольной точке на величину большую установленной Δg2:
у1 ≥ g1 при │у2 – g2│<│Δg2│;
у1 ≥ g1 ± Δg1 при у2 – g2 ≥ ±Δg2
(на рис. 10.2а заштрихованная область); алгоритмы с пропорциональной корректировкой, предполагающие контроль также двух или трех координат движения поезда, одна из которых основная, а остальные – корректирующие (см. рис. 10.2б); нелинейные алгоритмы, предусматривающие определение заданного значения основной координаты по уравнению движения поезда в зависимости от текущих значений v, S, t; алгоритмы с настройкой, имеющие несколько программ, каждая из которых выражает заданное значение основной координаты в зависимости от других координат. Выбор какой-либо программы определяется изменением параметров поезда, главным образом его массы и сопротивления движению. Программы для таких алгоритмов обычно составляют так, чтобы оптимизировать управление поездом при определенных его параметрах. Реализация этих алгоритмов требует сложного оборудования и их следует применять только при значительных изменениях параметров поезда.
Алгоритмы управления ЭПС в режиме тяги. Системы автоматического пуска наиболее широко распространены на электропоездах, где ограничение по сцеплению обычно лежит за пределами допустимых токов двигателей. На грузовых электровозах пусковой ток ограничен условиями сцепления и систему автоматического пуска надо дополнять системой автоматической стабилизации сцепления.
Отправление поезда с остановочного пункта производится либо автоматически в функции времени, либо вручную по команде машиниста. Перед подъёмами или на длинных перегонах необходим повторный разгон, если дальнейшее следование на выбеге может чрезмерно снизить скорость поезда. Перед подъёмами эта команда подается в функции пути, а на длинных перегонах с однородным профилем – в функции скорости.
Переход на выбег с контролем одной координаты. В этом случае возможны три варианта простейших алгоритмов:
v> v0н = const; S ≥ Sдн= const; t≥ Тдн = const . (10.1)
 На диаграмме рис. 10.3 точка N соответствует моменту отключения тяговых двигателей при номинальных параметрах. Назовем ее точкой номинального перехода на выбег. Она характеризуется номинальными Координатами v0н, Sдн и Тдн. Время хода по перегону Тн, состоит из времени движения до отключения тяговых двигателей Тдн (путь Sдн), а также времени выбега и торможения Тон (путь Sон). Предположим, что в результате изменения параметров поезда его тяговые свойства ухудшились и изменились кривые движения (штриховые линии на рис. 10.3). При алгоритме, предусматривающем контроль скорости, переход на выбег произойдёт в точке 1, а если контролируется путь или время – соответственно в точках 2 и 3. Следовательно, изменятся составляющие времени хода поезда по перегону. При алгоритме перехода на выбег Sд >const обе эти составляющие возрастают (Тд2 >Тдн и Т02 >Т0н) в результате снижения скорости начала выбега vо2 <vон. В случае Тз3 ≥const первая составляющая не изменится (Тз3 =Тдн), но значительно возрастёт вторая (Т03 >Т0н) вследствие снижения скорости начала выбега v03<v02<v0н, и одновременного увеличения длин путей выбега и торможения S03 >S0н. Поэтому поезд опоздает еще больше, чем при Sд ≥ const, т.е. ΔТ3 > ΔТ2. При алгоритме v0 ≥ const обе составляющие времени хода изменятся в соответствии с изменением пути разгона Sд1 > Sдн. Эти составляющие имеют противоположные по знаку приращения и результирующее опоздание поезда ΔТ1 окажется наименьшим из всех рассмотренных алгоритмов: ΔТ1< ΔТ2< ΔТ3.
На диаграмме рис. 10.3 точка N соответствует моменту отключения тяговых двигателей при номинальных параметрах. Назовем ее точкой номинального перехода на выбег. Она характеризуется номинальными Координатами v0н, Sдн и Тдн. Время хода по перегону Тн, состоит из времени движения до отключения тяговых двигателей Тдн (путь Sдн), а также времени выбега и торможения Тон (путь Sон). Предположим, что в результате изменения параметров поезда его тяговые свойства ухудшились и изменились кривые движения (штриховые линии на рис. 10.3). При алгоритме, предусматривающем контроль скорости, переход на выбег произойдёт в точке 1, а если контролируется путь или время – соответственно в точках 2 и 3. Следовательно, изменятся составляющие времени хода поезда по перегону. При алгоритме перехода на выбег Sд >const обе эти составляющие возрастают (Тд2 >Тдн и Т02 >Т0н) в результате снижения скорости начала выбега vо2 <vон. В случае Тз3 ≥const первая составляющая не изменится (Тз3 =Тдн), но значительно возрастёт вторая (Т03 >Т0н) вследствие снижения скорости начала выбега v03<v02<v0н, и одновременного увеличения длин путей выбега и торможения S03 >S0н. Поэтому поезд опоздает еще больше, чем при Sд ≥ const, т.е. ΔТ3 > ΔТ2. При алгоритме v0 ≥ const обе составляющие времени хода изменятся в соответствии с изменением пути разгона Sд1 > Sдн. Эти составляющие имеют противоположные по знаку приращения и результирующее опоздание поезда ΔТ1 окажется наименьшим из всех рассмотренных алгоритмов: ΔТ1< ΔТ2< ΔТ3.
Переход на выбег с контролем трех координат. Наиболее точно точку перехода на выбег можно выбрать на основании тяговых расчётов, но это требует громоздких вычислений. Так как отклонения точки фактического перехода на выбег от номинальной точки обычно невелико, то алгоритмы перехода на выбег можно существенно упростить, заменив квадратичную зависимость основного сопротивления движению на выбеге линейной и разложив уравнение движения поезда в ряд Тейлора по приращениям времени выбега и торможения ΔТ0, пути выбега и торможения ΔS0 и скорости начала выбега Δv0 (см. рис. 10.1). При этом можно получить следующую линейную зависимость, которая определяет положение точки фактического перехода на выбег относительно номинальной
ΔТ0=кS ΔS0 – кv Δv0.
В этой и последующих зависимостях следует учитывать знак приращений. Коэффициенты кS и кv представляют собой частные производные от времени выбега и торможения Т0 соответственно по длине выбега и торможения S0, а также по скорости начала выбега v0:
кS ≈ Твн / Sвн;  .
.
Выдержать время прибытия на следующий остановочный пункт, установленное графиком, можно, выполнив условие
ΔТ0 + Δτ0 + ΔТд ≤ 0,
где Δτ0 – опоздание поезда в точке номинального перехода на выбег; ΔТд – дополнительное время работы двигателей.
После выполнения преобразований общее для алгоритма перехода на выбег с контролем трёх координат и пропорциональной корректировкой уравнение имеет вид:
кSΔS0 – кvΔv0 + Δτ0 + ΔТд ≤ 0. (10.2)
Заменив ΔS0 = Sдн – Sд; Δv0= v0 – v0н; ΔТд = Тд – Тдн получим
кS Sд + кvv0 – Δτ0 – Тд ≥ кS Sдн + кvv0н – Тдн.
Для реализации этого алгоритма, помимо контроля опоздания поезда в точке номинального перехода на выбег необходимо измерять все три координаты движения и использовать три постоянные: кS, кv а также правую часть последнего выражения. Из трёх координат движения поезда любая может быть основной, а две другие – корректирующими.
Переход на выбег с контролем двух координат. Предположив, что за время ΔТд (см. рис. 10.1) поезд имеет постоянное ускорение а0н можно написать
ΔТд = Δv0/а0н и ΔS0= – v0н ΔТд . (10.3)
Используя эти соотношения и неравенство (10.2), выявим зависимость приращения корректирующей координаты от опоздания Δτ0. Выразив в неравенстве (10.2) ΔТд и ΔS0 через Δv0 получим выражение для корректировки по скорости
Δv0 ≥ а0нΔτ0 /(кSv0н + кvа0н –1). (10.4)
На основании выражений (10.2) и (10.3) можно установить закон корректировки по времени
ΔТд ≥ Δτ0 /(кSv0н + кvа0н –1) (10.5)
и по пути
ΔS0 ≥ –v0нΔτ0 /(кSv0н + кvа0н –1). (10.6)
Алгоритм перехода на выбег с контролем двух координат определяется двумя неравенствами: (10.1) для контроля основной координаты и одним из (10.4)…(10.5) для корректировки. Возможны девять вариантов алгоритма перехода на выбег с контролем двух координат. Каждый из этих алгоритмов требует контроля двух координат движения поезда, а каждый перегон должен, характеризоваться двумя постоянными: заданным значением основной координаты и передаточным коэффициентом корректирующего устройства.
 Алгоритмы управления ЭПС при торможении. Цель управления поездом в режиме торможения состоит в том, чтобы к моменту прибытия поезда в точку k (см. рис. 10.1) снизить его скорость до заданного значения vзк. Такое торможение называется прицельным, Оно осуществляется системой автоматического регулирования скорости (рис. 10.4), в которой заданная скорость переменная величина, зависящая от расстояния Sт между головой поезда и точкой k. Эта скорость определяется соотношением
Алгоритмы управления ЭПС при торможении. Цель управления поездом в режиме торможения состоит в том, чтобы к моменту прибытия поезда в точку k (см. рис. 10.1) снизить его скорость до заданного значения vзк. Такое торможение называется прицельным, Оно осуществляется системой автоматического регулирования скорости (рис. 10.4), в которой заданная скорость переменная величина, зависящая от расстояния Sт между головой поезда и точкой k. Эта скорость определяется соотношением
Sт = vзТп + (vз2 – vзк2)/(2атр), (10.7)
где Тп – время срабатывания тормозов; атр – расчётное замедление поезда.
Из выражения можно получить зависимость vз(Sт), которая называется программой управления поездом при торможении или сокращению тормозной программой.
Вследствие нелинейности тормозных характеристик, а также наличия случайных изменений массы поезда, параметров его тормозной системы и сопротивления движению, фактическое замедление ат отличается от расчетного атр. Для компенсации влияния этих отклонений предусматривается чередование нескольких (обычно двух) градаций тормозного замедления ат1 и ат2, которым соответствуют тормозные программы vз1(Sт) и vз2(Sт). В системе прицельного торможения эти программы реализуются функциональными преобразователями ФПI и ФП2.
Исполнительный элемент ИЭ преобразует сигнал рассогласования фактической v и заданной vз скорости в сигнал управления тормозами поезда, который прямо или косвенно определяет значение тормозного замедления поезда ат.
Команда на торможение с замедлением ат1 выдается, когда разность фактической скорости поезда v и заданной vз1 превышает порог чувствительности исполнительного элемента  , т.е. когда
, т.е. когда
v – vз1 ≥ . (10.8)
Тормозное замедление поезда снижается до значения ат2 после того, как в процессе торможения скорость поезда становится меньше vз2 на величину , т.е. когда
vз2 – v ≥ . (10.9)
Поезд движется с замедлением ат2 до тех пор, пока снова не будет выполнено условие (10.8). Процесс торможения, объединяющий два смежных интервала времени, для которых выполняются условия (10.8) и (10.9), будем называть циклом регулирования тормозного замедления или циклом торможения. Циклы торможения повторяются, пока поезд не достигнет заданной скорости vзk в точке k.
Таким образом, система прицельного торможения представляет собой релейную автоматическую систему, работающую в режиме автоколебаний. Неравенства (10.8) и (10.9) являются алгоритмом работы этой системы.
В зависимости от ее конкретного исполнения величины ат1, ат2, могут быть либо постоянными, либо функциями v, vз или S.
Система прицельного торможения с параллельными программами предусматривает изменение тормозного замедления поезда от ат1 до ат2 и обратно в пределах всего тормозного пути Sт. Каждому значению Sт соответствуют два значения заданной скорости: vз1 и vз2, как это показано на рис. 10.5. Если изображающая точка находится выше кривой vз1(S) или ниже кривой vз2(S), это соответствует торможению поезда с замедлением соответственно ат1 или ат2. Когда изображающая точка переходит в область между кривыми vз1(S) и vз2(S), то величина тормозного замедления не изменяется.
 Система прицельного торможения с параллельными программами будет работать в автоколебательном режиме, если расчетные тормозные замедления ат1 и ат2 удовлетворяют условиям
Система прицельного торможения с параллельными программами будет работать в автоколебательном режиме, если расчетные тормозные замедления ат1 и ат2 удовлетворяют условиям
ат1м > атр1 > ат2б и ат1м > атр2 > ат2б,
где ат1м и ат2б – соответственно наименьшее значение атр1 и наибольшее значение атр2, возможные при воздействии на поезд случайных факторов.
Отсюда следует, что атр1 и атр2 могут быть приняты одинаковыми. Существенное уменьшение объекта исходной информации и упрощение функциональной схемы достигается в случае, когда
vз1(Sт) – vз2(Sт)=Δvз=const.
 При этом функциональная схема содержит только один функциональный преобразователь ФП1. Вторая тормозная программа реализуется исполнительным элементом с характеристикой, показанной на рис. 10.6. Параллельные программы применены в системах прицельного торможения электропоезда ЭР200, Парижского метрополитена и в других системах.
При этом функциональная схема содержит только один функциональный преобразователь ФП1. Вторая тормозная программа реализуется исполнительным элементом с характеристикой, показанной на рис. 10.6. Параллельные программы применены в системах прицельного торможения электропоезда ЭР200, Парижского метрополитена и в других системах.
 В системе прицельного торможения с последовательными программами тормозной путь разделён на несколько участков, на каждом из которых может быть подана команда торможения только с одной опредёленной градацией замедления (рис. 10.7). Расчетные тормозные замедления ат1 и ат2 для построения тормозных программ vз1(S) и vз2(S) должны отвечать следующим условиям:
В системе прицельного торможения с последовательными программами тормозной путь разделён на несколько участков, на каждом из которых может быть подана команда торможения только с одной опредёленной градацией замедления (рис. 10.7). Расчетные тормозные замедления ат1 и ат2 для построения тормозных программ vз1(S) и vз2(S) должны отвечать следующим условиям:
атр1 ≥ ат1б и атр2 ≤ ат2м.
Практически расчетное замедление атр2 можно принять равным нулю. Системы прицельного торможения с последовательными программами применены на метрополитенах Москвы, Ленинграда, Нью-Йорка.

Причины неточного движения поездов. Большинство параметров, определяющих скорость и время хода поезда по перегону – величины случайные, которые можно описать с помощью законов распределения или их числовых характеристик. Так, для случайной величины Х числовыми характеристиками являются математическое ожидание тХ, среднее квадратичное отклонение σХ, коэффициент вариации VХ = σХ /тХ. Обычно эти характеристики определяют на основе статистической обработки опытных данных.
Напряжение на токоприемнике Uс подчиняется закону распределения, близкому к нормальному. При этом чаще всего VU = 0,06…0,07. В условиях децентрализованного питания контактной сети VU = 0,03.
Масса поезда М зависит от его составности и характера груза или от населенности пассажирских вагонов. Коэффициент вариации массы можно принимать для грузовых поездов VМ = 0,15…0,40, для пригородных электропоездов VМ =0,04…0,07, для поездов метрополитена VМ =0,06…0,075.
Основное сопротивление движению поезда распределено по нормальному закону: для пассажирских и порожних вагонов σW = 0,8…0,85 Н/кН, а для гружёных грузовых вагонов σW = 0,35…0,4 Н/кН.
Расчёт точности движения поездов. Любую координату движения поезда у можно рассматривать как функцию параметров поезда Uс, М, W‚ т.е., как функцию нескольких независимых случайных величин. Для координаты движения поезда
ту = у (тU, тM, тW); и  .
.
Эти соотношения точны только при линейной зависимости у(U, М, W). Если нелинейность выражена сильно, необходимо вводить по правки.
Время хода поезда по перегону также величина случайная, имеющая, как известно, три составляющие
Т = Тд + Т в+ Тт ,
где Тд – время разгона (ускорения); Т в – время выбега; Тт – время торможения.
Вариация напряжения U влияет только на величину Т и на начальные координаты выбега, а вариация массы поезда – на времена разгона Тд и выбега Тв, а также на начальные координаты выбега. Вариация сопротивления движению влияет преимущественно на время Тв. Среднее квадратичное отклонение времени торможения обычно невелико и его можно не учитывать. Обобщая сказанное, можно написать
 ,
,
где  и
и  – составляющие среднего квадратичного отклонения времени разгона, вызванные изменением соответственно напряжения на токоприемнике и массы поезда;
– составляющие среднего квадратичного отклонения времени разгона, вызванные изменением соответственно напряжения на токоприемнике и массы поезда;  и
и  – то же времени выбега, вызванные изменением соответственно массы поезда и удельного основного сопротивления движению;
– то же времени выбега, вызванные изменением соответственно массы поезда и удельного основного сопротивления движению;  и
и  – то же времени выбега, вызванные изменением начальных координат выбега вследствие изменения соответственно напряжения и массы поезда (знак «–» – при переходе на выбег по скорости, а знак «+» – по пути или времени).
– то же времени выбега, вызванные изменением начальных координат выбега вследствие изменения соответственно напряжения и массы поезда (знак «–» – при переходе на выбег по скорости, а знак «+» – по пути или времени).
Составляющие средних квадратичных отклонений, значения которых не превышают 30% результирующего, можно не учитывать, так как это обеспёчиваёт результирующую погрешность не более 5%.
Рассмотрим показатели точности алгоритма перехода на выбег с контролем скорости. Величинам, характеризующим точность алгоритмов перехода на выбег v0=const; Sд=const и Тд=const присвоены соответственно индексы 1, 2 и 3.
Для времени и пути разгона при изменении напряжения на токоприемнике:
 ; и
; и  ,
,
где v0н – скорость окончання разгона поезда; а0н – ускорение поезда при номинальном напряжении для v= v0н Тдн, Sдн – время и путь разгона до скорости v0 при номинальных значениях U и М.
Удельная сила тяги и значительная часть удельного основного сопротивления движению обратно пропорциональны массе поезда. Для времени и пути разгона при изменениях массы поезда:
 и
и  .
.
Погрешность времени выбега зависит от изменений массы поезда и основного сопротивления движению, а также от вариации начальных координат выбега. Среднее квадратичное отклонение времени выбега вследствие изменения массы поезда
 .
.
Эта зависимость получена в предположении, что всё удельное основное сопротивление движению обратно пропорционально М, а так же без учета ряда малых слагаемых величины . Среднее квадратичное отклонение времени выбега вследствие изменений сопротивления движению
. Среднее квадратичное отклонение времени выбега вследствие изменений сопротивления движению
 ,
,
где ζ– постоянная перевода из одной системы единиц в другую; Твн – время выбега при номинальных условиях; vтн – скорость начала торможения при номинальных условиях.
Формулы для расчета составляющих среднего квадратичного отклонения координат движения поезда сведены в табл. 10.1.
Выбор алгоритма перехода на выбег. При ручном управлении влияние случайных факторов компенсирует машинист, а степень компенсации зависит от его квалификации и опыта. В случае автоматического управления их компенсацию осуществляет система автоведения. Прb выборе алгоритма её работы необходимо сопоставить допустимое отклонение поезда от графика Δτдоп и среднее квадратичное отклонение времени хода по перегону σТ при заданном уровне возмущающих воздействий.
Время хода по перегону Т для любого поезда практически не вый дет за пределы Тз ± Δτдоп, если
Δτдоп≥3σТ. (10.10)
Таблица 10.1
| Координаты движения поезда | Составляющие среднего квадратичного отклонения координат движения поезда при различных алгоритмах перехода на выбег | ||
| v0=const | Sд=const | Тд=const | |
|
Тд |
и |
| - |
|
Sд |
и | - |
|
| v0 | - |
|
|
|
Тв |
|
|
|





Неравенство (10.10) определяет допустимость применения алгоритма перехода на выбег с контролем одной координаты (зона ІІІ на рис. 10.8). Если оно не выполнено, то необходима корректировка.
 При ступенчатой корректировке (зона ІІ на рис. 10.8) наилучшие показатели точности получаются, если корректирующее воздействие равно I,4σТ при отклонении фактического времени хода Т от заданного Тз более чем на ±0,8σТ (рис. 10.9а).
При ступенчатой корректировке (зона ІІ на рис. 10.8) наилучшие показатели точности получаются, если корректирующее воздействие равно I,4σТ при отклонении фактического времени хода Т от заданного Тз более чем на ±0,8σТ (рис. 10.9а).
 При такой корректировке нормальный закон распределения случайной величины Т преобразуется (рис. 10.9б) и вероятность того, что время хода поезда о учётом ступенчатой корректировки не выйдет за пределы Тпр± ±σТ, составляет 97,5%. Таким образом, применять алгоритм со ступенчатой корректировкой возможно, если
При такой корректировке нормальный закон распределения случайной величины Т преобразуется (рис. 10.9б) и вероятность того, что время хода поезда о учётом ступенчатой корректировки не выйдет за пределы Тпр± ±σТ, составляет 97,5%. Таким образом, применять алгоритм со ступенчатой корректировкой возможно, если
Δτдоп ≥ σТ. (10.11)
При Δτдоп ≤ σТ необходимо применять алгоритмы перехода на выбег с пропорциональной корректировкой с контролем двух или трех координат (зона І на рис. 10.8).
Такие алгоритмы позволяют практически полностью компенсировать влияние случайных факторов в режиме тяги.
Погрешность таких алгоритмов определяется только влиянием случайных факторов в режиме выбега и характеризуется неравенством
Δτдоп≥3σТв.
Имея в виду, что σТв ≤ σТ, можно привести последнее неравенство к виду
 . (10.12)
. (10.12)
Графическая интерпретация не равенств (10.10), (10.11) и (10.12) приведена на рис. 10.8, где каждой совокупности σТ, σТв и Δτдоп соответствует определённая точка.
Когда уровень возмущающих факторов, оцениваемых значениями σТ и σТв, не позволяет реализовать требуемую величину Δτдоп (незаштрихованная область на рис. 10.8), необходимо уменьшить время выбега, применив режим движения о постоянной скоростью.
Причины неточной остановки поёздов. Точность остановки поезда в результате прицельного торможения зависит от правильности выбора точки начала торможения и от стабильности тормозного замедления. Погрешность выбора начальных координат торможения определяется тем, насколько точно реальная тормозная программа совпадает с теоретической. Тормозное замедление поезда рассчитывается по известной из курса «Теория электрической тяги» выражением
 .
.
 Здесь масса поезда М и основное сопротивление движению w0 являются случайными величинами; тормозная сила поезда В зависит от таких случайных факторов, как давление в тормозных цилиндрах и коэффициент трения тормозных колодок, характеристики тяговых двигателей и сопротивлений тормозных резисторов. При плавном регулировании тормозное замедление – случайна величина, не зависящая от времени (рис. 10.10а), а при ступенчатом (рис. 10.10б, в) оно претерпевает ряд скачкообразных изменений в случайные моменты времени. Поэтому тормозное замедление ат представляет собой не просто случайную величину, а случайную зависимость ат(t), которая характеризуется математическим ожиданием и корреляционной функцией. В частности, для прямоугольных (см. рис. 10.10б) и пилообразных (рис. 10.10в) функций тормозного замедления, которые характерны для пневматического и электрического торможения, корреляционная функция
Здесь масса поезда М и основное сопротивление движению w0 являются случайными величинами; тормозная сила поезда В зависит от таких случайных факторов, как давление в тормозных цилиндрах и коэффициент трения тормозных колодок, характеристики тяговых двигателей и сопротивлений тормозных резисторов. При плавном регулировании тормозное замедление – случайна величина, не зависящая от времени (рис. 10.10а), а при ступенчатом (рис. 10.10б, в) оно претерпевает ряд скачкообразных изменений в случайные моменты времени. Поэтому тормозное замедление ат представляет собой не просто случайную величину, а случайную зависимость ат(t), которая характеризуется математическим ожиданием и корреляционной функцией. В частности, для прямоугольных (см. рис. 10.10б) и пилообразных (рис. 10.10в) функций тормозного замедления, которые характерны для пневматического и электрического торможения, корреляционная функция
 ,
,
где σат – среднее квадратичное отклонение тормозного замедления; τ – интервал времени между рассматриваемыми значениями случайной функции; λ – математическое ожидание числа ступенчатых изменений тормозного замедления в единицу времени; ρ – поправочный коэффициент: ρ = 1 при синхронном изменении тормозной силы во всех вагонах поезда и ρ = 0,5 при отсутствии синхронизации.
Выражение для коэффициента вариации тормозного замедления
 ,
,
где VB и VM – коэффициенты вариации тормозной cилs В и массы поезда М; ηа – относительная чувствительность авторежима, т.е. отношение отноcительного изменения пусковой силы тяги к относительному изменению массы поезда; при отсутствии авторежима ηа = 0, при идеальном авторежиме ηа = 1.
Если кривая ат(t) имеет пилообразную форму c постоянной амплитудой колебания, то сила В подчиняется равновероятному закону, при котором
 ,
,
где кнВ – коэффициент неравномерности тормозного усилия.
Точность прицельного торможения с последовательными программами. Влияние случайных факторов в процессе прицельного торможения обусловливает вариацию координат движения поезда в конце каждого цикла торможения.
При последовательных тормоз программах количество циклов торможения – величина постоянная и вариация скорости начала торможения в каждом цикле может быть компенсирована тормозной программой. Поэтому для определения точности остановки достаточно рассмотреть влияние случайных факторов только в последнем цикле торможения.
 Для этих условий математическая модель системы прицельного торможения может быть представлена в виде двух последовательно соединенных интегрирующих звеньев; на вход её воздействует ат(t) стационарная случайная функция (рис. 10.11). Случайная функция на выходе первого интегратора соответствует скорости поезда в режиме торможения vт(t), а на выходе второго – тормозному пути Sт(t). Эти случайные функции уже не являются стационарными. Отклонение точки фактической остановки поезда от расчётной представляет собой случайную величину, распределенную по нормальному закону.
Для этих условий математическая модель системы прицельного торможения может быть представлена в виде двух последовательно соединенных интегрирующих звеньев; на вход её воздействует ат(t) стационарная случайная функция (рис. 10.11). Случайная функция на выходе первого интегратора соответствует скорости поезда в режиме торможения vт(t), а на выходе второго – тормозному пути Sт(t). Эти случайные функции уже не являются стационарными. Отклонение точки фактической остановки поезда от расчётной представляет собой случайную величину, распределенную по нормальному закону.
Пользуясь правилами интегрирования случайных функций и пренебрегая малыми слагаемыми, можно найти выражение для среднего квадратичного отклонения тормозного пути
 ,
,
где vт – скорость начала последнего цикла торможения.
Из этой формулы видно, что точность прицельного торможения с последовательными программами можно повысить путем снижения скорости начала последнего цикла торможения, синхронизации изменений тормозной силы во всех вагонах поезда и увеличения числа ступеней ее регулирования.
Точность прицельного торможения с параллельными тормозными программами. В этом варианте количество циклов торможения величина случайная и чтобы определить точность остановки поезда, необходимо рассматривать работу замкнутой системы автоматического регулирования его скорости.
Структурная схема системы прицельного торможения, приведенная на рис. 10.12 соответствует функциональной схеме, изображенной на рис. 10.4. Формирователь программной скорости 1 воспроизводит уравнение (10.7). В результате линеаризации этого выражения можно получить зависимость
vз=vзн – кS
где vзн – начальное значение заданной скорости;
 .
.
 Элемент сравнения 2 вырабатывает сигнал, равный отклонению фактической скорости поезда от заданной Δv= =v – vз. Исполнительный элемент 3 преобразует величину Δv в сигналы, пропорциональные установившимся значениям тормозных замедлений. Вид характеристики исполнительного элемента определяется способами регулирования, количеством градаций и характером изменения тормозного замедления. В большинстве случаев исполнительный элемент имеет характеристику, показанную на рис. 10.6 и его выходной сигнал, который может принимать два значения тормозного замедления ат1 и ат2 сокращенно обозначен ат1,2.
Элемент сравнения 2 вырабатывает сигнал, равный отклонению фактической скорости поезда от заданной Δv= =v – vз. Исполнительный элемент 3 преобразует величину Δv в сигналы, пропорциональные установившимся значениям тормозных замедлений. Вид характеристики исполнительного элемента определяется способами регулирования, количеством градаций и характером изменения тормозного замедления. В большинстве случаев исполнительный элемент имеет характеристику, показанную на рис. 10.6 и его выходной сигнал, который может принимать два значения тормозного замедления ат1 и ат2 сокращенно обозначен ат1,2.
Апериодическое звено 4 преобразует длительность выходного сигнала исполнительного элемента в сигнал, пропорциональный мгновенному значению тормозного замедления ат. Зависимость между мгновенным и установившимся значениями тормозных замёдлений определяется уравнением
ат= ат1,2[1-exp(–t/Т)]
где t – длительность выходного сигнала исполнительного элемента; Т – постоянная времени тормоза.
На рис. 10.12 изображены только основные звенья структурной схемы. В зависимости от конкретного исполнения системы структурная схема может быть дополнена различными корректирующими звеньями и, в частности, обратными связями по скорости и тормозному замедлению.
Работа замкнутой системы прицельного торможения сопровождается периодическими колебаниями рассогласования скоростей Δv. Точность прицельного торможения зависит от амплитуды этих колебаний, а плавность – от частоты. Амплитуда Δvб и частота ω автоколебаний в этой системе могут быть определены методом гармонической линеаризации:
 ; (10.13)
; (10.13)
 . (10.14)
. (10.14)
Амплитуда отклонения тормозного пути  . Подставим сюда выражения (10.13) и (10.14) и пренебрегая слагаемыми второго порядка малости, получим
. Подставим сюда выражения (10.13) и (10.14) и пренебрегая слагаемыми второго порядка малости, получим
 . (10.15)
. (10.15)
 Из уравнений (10.14) и (10.15) видно, что повышение точности торможения путем уменьшения Δvз; ограничено повышением частоты тормозных воздействий ω на поезд и снижением плавности торможения. Отклонение тормозного пути зависит также от изменения массы поезда и нестабильности характеристик тормозов.
Из уравнений (10.14) и (10.15) видно, что повышение точности торможения путем уменьшения Δvз; ограничено повышением частоты тормозных воздействий ω на поезд и снижением плавности торможения. Отклонение тормозного пути зависит также от изменения массы поезда и нестабильности характеристик тормозов.
Сравнив наибольшие отклонения тормозных путей при последовательных и параллельных программах (рис. 10.13), можно сделать следующие выводы. При параллельных программах точность остановки не зависит от скорости начала торможения, а при последовательных зависит практически линейно. В случае высоких скоростей начала торможения большую точность обеспечивают параллельные программы, а для низких – последовательные. Повышение точности прицельного торможения с параллельными программами ограничено ростом частоты тормозных воздействий на поезд и снижением плавности торможения.

Системы автоматического управления движением пассажирских поездов (САУ ПП) делятся на одно- и двухконтурные. Одноконтурные САУ ПП осуществляют выбор позиции управления N электровоза в зависимости от рассогласования ΔТ между фактичеcким временем хода по контрольному участку и программным. Каждой позиции управления соответствуют определенные позиции контроллеров и тормозных кранов. В двухконтурных САУ ПП вычисляется требуемая скорость движения в зависимости от рассогласования ΔТ (первый контур), а затем в соответствии с вычисленной скоростью регулятором скорости (второй контур) выбирается позиция управления.
Одноконтурные САУ ПП. Системы автоматического управления пассажирскими поездами с одним контуром управления (рис. 10.14) состоят из объекта управления ОУ, регулятора времени хода РВ, программного блока ПБ, исполнительного элемента ИЭ и тормозного блока ТБ. Объект управления – поезд имеет управляемую величину Т(sk) – время хода по контрольному участку пути. На поезд оказывает влияние возмущающее воздействие Fв, препятствующее реализации заданного времени хода. Регулятор времени хода РВ, состоящий из чувствительного элемента времени хода ЧЭ, элемента сравнения времени хода ЭС и управляющего элемента УЭ, предназначенного для выработки управляющего воздействия.
Чувствительный элемент ЧЭ преобразует величину t в цифровой код в определенных точках пути sk, где k= 0, 1, 2, ... Поэтому на вы ходе ЧЭ будет дискретная функция дискретного аргумента tи(sk) в то время, как на входе – непрерывная функция непрерывного аргумента t(s). При этом Δsk =sk – sk-1 – длина k-того контрольного участка, по которому задано время хода. Таким образом, ЧЭ осуществляет дискретизацию управляемой величины t по пути.
Элемент сравнения ЭС реализует операцию вычитания и определяет рассогласование между измеренным значением и заданным программным временем хода:
ΔТ(sk)=tи(sk) – Тп(sk).
Управляющий элемент УЭ, реализует закон управления, осуществляя преобразование ΔТ(sk) в номер N позиции управления; он выбирает номер ходовой позиции или нулевую позицию (выбег). Если номер позиции управления выбирается только в зависимости от рассогласования по управляемой величине ΔТ(sk), то САУ ПП относится к классу автоматических систем с управлением по отклонению. Если N определяется в зависимости от Fв и ΔТ(sk), то управление осуществляется как по отклонению, так и по возмущению. В этом случае САУ ПП относится к классу автоматических систем с комбинированным управлением.
 Исполнительный элемент ИЭ непосредственно воздействует на цепи локомотивной автоматики, получая информацию от УЭt, или тормозного блока ТБ.
Исполнительный элемент ИЭ непосредственно воздействует на цепи локомотивной автоматики, получая информацию от УЭt, или тормозного блока ТБ.
Программный блок ПБ служит для хранения программ движения поезда и состоит из чувствитель-ного элемента пути ЧЭ дискретизатора пути ДП и постоянных запоми-нающих устройств ПЗУ программ движения. На рис. 10.14 приведены блоки основной программы времени хода от пути по контрольным участкам Тп(sk), про-граммы номера позиции и режима ведения поезда (тяга или выбег) Nп(sk) и программы допустимых скоростей vд(sk). Про-граммы Тп(sk) и vд(sk) необходимы в любых автономных САУ ПП. Программа Nп(sk) ис-пользуется для улуч-шения качества управ-ления в ряде автономных САУ ПП. Дискретизатор пути ДП программного блока определяет границы контрольных участков.
Тормозной блок ТБ осуществляет прицельное торможение у платформ, уменьшение скорости по сигналам автоматической локомотив ной сигнализации (АЛС) и в случае превышения поездом значения vд. Он состоит из чувствительного элемента скорости ЧЭv элемента выбора наименьшей ограничивающей скорости ЭВНС, элемента сравнения скорости ЭСv, постоянного запоминающего устройства программ торможения ПЗУ ПТ и управляющего элемента торможения УЭТорм.
Элемент ЧЭ осуществляет измерение скорости и преобразование ее в цифровой код. ЭВНС выбирает наименьшее значение скорости из поступающих значений из ПЗУ и по сигналам АЛС. Выбранная скорость сравнивается с измеренной в ЭСv, где реализуется операция вычитания. Рассогласование по скорости Δv поступает на УЭТорм, который в зависимости от значения Δv формирует сигнал перехода на выбег. Этот сигнал поступает на УЗ и является для него приоритетным В том случае, когда переход на выбег не обеспечивает необходимого уменьшения скорости, УЭТорм формирует сигнал торможения, поступающий в исполнительный элемент ИЭ. Траектория торможения (в том числе и до полной остановки) задана в ПЗУ ПТ.
Функции тормозного блока могут быть реализованы системами безопасности, в частности, системой автоматического управления торможением САУТ. Поэтому ПБ и ТБ относятся к дополнительным устройствам САУ ПП; без них, как и без основных, работоспособность системы автоведения не может быть обеспечена.
Основным контуром управления является контур регулирования времени хода. САУ ПП, которые реализуют один из законов управления N(ΔTk), N(ΔTk, Fв), являются одноконтурными.
По числу программ движения поезда одноконтурные САУ ПП делятся на одно-, двух- и трехпрограммные; в число программ не входят программы vд(sk) и тормозные программы, так как они не влияют на выбор закона управления временем хода. Однопрограммные одноконтурные САУ ПП имеют основную программу движения Тп(sk) и реализуют закон управления
N = Ns+ΔN(Тk),
где Ns – базовая позиция управления; ΔN(Тk) – количество дополнительных позиций управления, выбираемых УЭt для компенсации отклонения ΔTk.
Двухпрограммные одноконтурные САУ ПП имеют программы движения Тп(sk), Nп(sk) и реализуют следующие законы управления:
N = Nпi(ΔТk, sk) и N = Nп(sk) +ΔN(ΔТk),
где Nпi(ΔТk, sk) – вариант i-того номера программной позиции на k-том контрольном участке, выбираемый УЭt в зависимости от ΔТk.
Структурные схемы одно- и двухпрограммных одноконтурных САУ ПП можно получить, воспользовавшись рис. 10.14.
Трёхпрограммные одноконтурные САУ ПП хранят программы движения Тп(sk), Nп(sk), vп(sk) и реализуют закон управления:
N = Nп(sk) +ΔN(ΔТk, Δvk),
где Δvk = Δv(sk) – рассогласование по скорости в конце k-того контрольного участка.
Двухконтурная САУ ПП. Структурная схема двухконтурной САУ ПП (рис. 10.15), помимо устройств ПБ и ТБ, аналогичных применяемым в одноконтурной САУ ПП, содержит регулятор времени хода РВ, отличный от используемого в одноконтурных системах, и регулятор скорости РС.
 Регулятор времени хода РВ определяет рассогласование по времени ΔТ(sk) и преобразует его в заданное значение скорости vз(sk), которое определяется в сумматоре скорости СМv как алгебраическая сумма программного значения скорости vп(sk) и Δv[ΔТ (sk)] вычисляемоuо в УЭt.
Регулятор времени хода РВ определяет рассогласование по времени ΔТ(sk) и преобразует его в заданное значение скорости vз(sk), которое определяется в сумматоре скорости СМv как алгебраическая сумма программного значения скорости vп(sk) и Δv[ΔТ (sk)] вычисляемоuо в УЭt.
Регулятор скорости РС, состоящий из чувствительного элемента скорости ЧЭv, элемента сравнения скоростей ЭСv, управляющего элемента УЭ предназначен для поддержания с требуемой точностью заданного уровня скоростей vз(sk). Чувствительный элемент ЧЭv преобразует непрерывную функцию скорости непрерывного аргумента t в цифровой эквивалент vи(nTv), где п=0,1,2, ...; Tv – шаг дискретизации по времени. Элемент сравнения ЭСv определяет рассогласование между измеренной vи и заданной vз скоростями движения: Δv = vи – vз. Управляющий элемент УЭv выбирает управляющее воздействие (для электровозов с дискретным управлением силой тяги это номер позиции N контроллера) в зависимости от Δv. Таким образом, регулятор скорости реализует закон управления N(vз). Исполнительный элемент ИЭ связывает регулятор скорости с цепями управления тягового привода.
Наличие в САУ ПП регулятора скорости позволяет сделать регулятор времени двухконтурных систем универсальным для локомотивов всех типов. На ряде современных пассажирских электровозов регулятор скорости входит в состав локомотивной автоматики. Наличие двух программ Тп(sk), и vп(sk), необходимых для функционирования рассмотренной двухконтурной САУ ПП, позволяет отнести эту систему управления к классу двухпрограммных. В том случае, когда УЭt вычисляет значение заданной скорости vз как оператор над ΔТ(sk), не используя информацию о программной скорости, двухконтурные САУ ПП переходят в разряд однопрограммных систем.
Основной задачей, реализуемой централизованной системой автоведения поездов метрополитена (ЦСАВПМ), является выполнение планового графика движения при компенсируемых возмущениях. В условиях сбоя движения, когда возмущения таковы, что ресурсов нагона и уменьшения длительностей стоянок недостаточно для выполнения ‘графика движения (некомпенсируемые возмущения), в системе авто ведения под контролем диспетчера пересчитывается плановый график движения так, чтобы максимально обеспечить провозную способность линии. При условии выполнения планового или пересчитанного графика движения система автоведения должна так осуществлять управление, чтобы обеспечить минимизацию расхода энергии на тягу поездов.
ЦСАВПМ содержит два функциональных контура управления. Верхний функциональный контур реализует вычисление длительностей стоянок и времени хода для всех поездов данной линии. Входной ин формацией в этом контуре является программа (график) движения поездов, измеряемыми величинами – время прибытия и отправления поездов со станций и (или) время прохождения контрольных точек. Выходные величины – вычисленные длительности стоянок и время хода.
Нижний функциональный контур реализует вычисленные верхним контуром длительности стоянок, время хода поездов и дополнительно осуществляет прицельное торможение и оборот состава в тупиках. Под прицельным торможением понимается как выполнение заданных скоростных ограничений в фиксированных координатах пути под контролем систем обеспечения безопасности движения, так и останов ка поезда на станции и в оборотных тупиках с требуемой точностью.
В соответствии с расположением аппаратуры система автоведения содержит следующие уровни: центральный пост управления (ЦПУ); систему передачи дискретной информации «ЦПУ – станция», «станция –ЦПУ»; станционное устройство (СУ); систему передачи дискретной информации с СУ на поезд и с поезда на СУ; поездное устройство управления.
Алгоритмы управления движением поездов на линии метрополитена. Контур верхнего уровня, получая информацию о движении поездов, определяет рассогласование между параметрами исполненного и заданного графиков, вычисляет требуемые длительности стоянок и время хода по перегону. В системах автоматического управления движением поездов метрополитена нашли применение графиковые, интервальные и графиково-интервальные алгоритмы.
В графиковых алгоритмах с первоочередным использованием ресурса стоянки отклонение времени прибытия поезда на станцию от графикового компенсируется изменением длительности стоянки. Отклонение времени отправления поезда со станции от графикового компенсируется изменением времени хода поезда по перегону. При этом ограничениями являются минимальная длительность стоянки, которая определяется как время, необходимое для высадки и посадки пассажиров (обычно 15 с), минимальное время хода поезда по перегону, минимальный интервал попутного следования поезда, задаваемый системами обеспечения безопасности движения.
Интервальные алгоритмы так же, как и графиковые, делятся на алгоритмы с первоочередным использованием ресурса длительности стоянки, с неизменной длительностью стоянки и с первоочередным использованием ресурса времени хода.
При интервальном алгоритме с первоочередным использованием ресурса стоянки ее длительность изменяется для компенсации отклонения интервала по прибытии, а время хода – для компенсации отклонения интервала по отправлению.
При интервальных алгоритмах с неизменной длительностью стоянки ликвидация отклонения исполненного графика от планового осуществляется только изменением времени хода поезда по перегону.
При интервальном алгоритме с первоочередным использованием ресурса времени хода сначала используется изменение времени хода. Если ресурс по уменьшению времени хода исчерпан, изменяется длительность стоянки.
Интервальные алгоритмы непосредственно не привязывают движение поезда к астрономическому времени.
Графиково-интервальные алгоритмы формируют управления, используя информацию об отклонениях графикового и фактического времени прибытия и отправления поездов, а также ин формацию об отклонениях интервалов по прибытии и отправлению. Рассмотрим один из алгоритмов этой группы. При допустимых отклонениях исполненного графика от планового применяется графиковый алгоритм с первоочередным использованием ресурса длительности стоянки. Если интервал по отправлению сзади идущего (п+1)-го поезда с (j –1)-й станции больше заданного, определяемого из условий недопустимости сверхнормативного скопления пассажиров на j-той станции из-за опоздания (п+1)-го поезда, то п-ый (впереди идущий поезд) принудительно «выбивается» из графика и задерживается на j-той платформе на фиксированное время. Таким образом уменьшается время, в течение которого на платформе j-той станции отсутствует поезд. Управляющее воздействие на изменение времени хода для принудительно задержанных поездов не формируется. Опаздывающий (п+1)-ый поезд должен реализовать минимальное время хода.
Системы автоведения электропоездов САВПЭ разработаны с упреждающим тяговым расчётом и перераспределением времени хода по участку с целью минимизации расхода энергии на тягу. В памяти системы автоведения заложено время хода по участку от начальной до конечной станции, В процессе движения система автоведения получает информацию с частотно-импульсного датчика о скорости и пройденном расстоянии, тай- мер микроконтроллера вычисляет оставшееся до конечной станции время хода, исключая длительности стоянок. Микроконтроллер распределяет время хода между впереди лежащими перегонами так, чтобы уменьшить расход энергии на тягу. Эта задача решается циклически (время цикла 1 с). Упреждающий тяговый расчет реализуется также циклически для определения точки перехода на выбег из условия выполнения расчётного времени хода до первой остановки электропоезда.
После перехода на выбег упреждающий тяговый расчет производится для того, чтобы определить, требуется ли дополнительное включение тяговых двигателей. При необходимости дополнительного включения вычисляется его координата. После чего тяговый расчет выполняется для определения точки перехода на выбег.
Циклически осуществляемый тяговый расчёт дает возможность в начале каждого нового цикла вводить измеренные координаты движения (расстояние, скорость, оставшееся до остановки время хода). Так по существу, реализуется обратная связь в цифровой системе автоведения.

Телемеханика — отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи.
Применительно к ЭПС системы телемеханики используют для:
– управления дополнительными электровозами в соединенных поездах;
– электровозами-толкачами и маневровыми электровозами;
– передачи командной информации на электровоз о скорости надвига состава на сортировочных горках;
– управления ЭПС во время его испытаний в критических по условиям безопасности ситуациях;
– передачи информации в централизованных системах автоведения.
Системы телеуправления применяют при территориальном удалении распорядительных устройств от объектов управления. При этом возможны следующие системы телеуправления, принцип построения которых для цепей прямой связи поясняют схемы рис. 10.16.
 Системы местного управления (рис. 10.16а), в которых задающий сигнал g без всякого изменения попадает по линиям связи в устройство управления УУ. На сигнал g (а также на любой другой аналогичный распорядительный сигнал) в линии связи воздействуют возмущения Σqс. Уровни многих из них находятся в прямой зависимости от протяженности линий связи lс. В частности, для электрических сигналов в виде напряжений U возмущением будет и падение напряжения ΔUс в линии связи. Так,
Системы местного управления (рис. 10.16а), в которых задающий сигнал g без всякого изменения попадает по линиям связи в устройство управления УУ. На сигнал g (а также на любой другой аналогичный распорядительный сигнал) в линии связи воздействуют возмущения Σqс. Уровни многих из них находятся в прямой зависимости от протяженности линий связи lс. В частности, для электрических сигналов в виде напряжений U возмущением будет и падение напряжения ΔUс в линии связи. Так,
Uвых с= Uвх с –ΣΔUс= Uвх с –icΣri0li,
где Uвх с, Uвых с – значения напряжения сигнала соответственно на входе и выходе линий связи; ic, ri0, li – соответственно ток сигнала, удельные (на единицу длины) сопротивления участков линии связи и их протяженность.
От длины линий связи зависит также значение индуктированных в них напряжений помех и ряд других возмущений. Поэтому такая система пригодна только при линиях связи небольшой длины. В линиях связи большой протяжённости сигналы будут недопустимо искажаться, а уровень их мощности снижается.
Дистанционная система управления (рис. 10.16б), предусматривающая обязательное усиление сигналов g усилителями УС, включёнными на выходе линий связи. Дистанционным является управление ЭПС по системе нескольких (многих) единиц. В качестве усилителей здесь используют приводы электромеханических элементов и другие аналогичные устройства. Хотя в дистанционных системах распорядительные сигналы и усиливаются, но в линиях связи они подвергаются таким же искажениям, как и в местных системах. Поэтому и здесь рас стояние lс не может быть значительным.
Система телеуправления – телемеханического управления (рис. 10.16в), которая предусматривает передачу распорядительных сигналов с помощью специальных передатчиков и приемников, т.е. устройств, предназначенных для передачи информации на любые расстояния. Передатчики осуществляют преобразование поступающих сигналов g в сигналы другой физической природы gт, обладающих наиболее высокой помехоустойчивостью. Приемники преобразуют сигналы gт в сигналы исходного вида g. С помощью телеуправления можно решать ряд задач, неразрешимых при других системах управления. Отметим лишь те из них, которые имеют наиболее существенное значение применительно к управлению локомотивами и движением поездов:
– объединение в общую систему сопряженного автоматического управления нескольких однородных объектов, например всех локомотивов, выполняющих поездную работу на каком-то участке, узле, направлении. Такая система должна обеспечивать согласованность (синхронность) следования всех поездов, в результате чего повышается пропускная способность участка, узла, дороги. Именно в этом заключена может быть наибольшая эффективность телеуправления, особенно если его внедряют на участках с предельным использованием пропускной способности;
– объединение в общую систему комплексного управления нескольких подсистем разнородных по характеру. В этом случае целесообразно автоматизировать такие функционально связанные подсистемы, как локомотивное хозяйство, организация движения, система тягового электроснабжения. Именно на этом принципе должна строиться единая автоматическая система управления транспортным процессом, назначение которой – оптимизация всего транспортного процесса;
– обеспечение диспетчерского воздействия на работу сложных комплексных систем и отдельных объектов, входящих в эти системы. Под диспетчерским воздействием понимают дискретную и, как правило, дистанционную настройку, как всей системы, так и ее отдельных элементов. Диспетчерское воздействие может осуществляться в системах, состоящих из самых различных объектов, в том числе и неавтоматизированных. На железнодорожном транспорте диспетчерское управление применяют очень широко.
Примером может быть система диспетчерской централизации, при которой дистанционное автоматическое связывание сочетается с неавтоматическим управлением объектами – поездами. Широкое внедрение в современное диспетчерское управление вычислительной и вычислительно-управляющей техники, а также современных средств передачи информации постепенно превращают его в систему комплексного автоматического телеуправления (автотелеуправления); перенос распорядительных устройств автоматики, наиболее чувствительных к воздействию возмущений, с ЭПС на центральный пост управления. При этом можно полностью исключить воздействие на них механических процессов (толчков, вибраций), нестабильности температур и напряжений. В условиях центрального поста нет таких жёстких габаритных ограничений, как при размещении оборудования на ЭПС, что позволяет, в частности, существенно повысить помехозащищенность распорядительных устройств автоматики. Может быть значительно повышен уровень обслуживания этих устройств.
 В системах местного и дистанционного управления для каждого вида передаваемых распорядительных сигналов требуется отдельная физическая линия связи (например, отдельный поездкой провод). В системах телеуправления передатчики осуществляют кодирование сигналов – преобразование их в импульсные или высокочастотные. При этом для каждой системы сигналов нет необходимости в отдельной физической линии связи, достаточно лишь выделить определённый диапазон несущих частот для каждой из них или как-то иначе подразделить эти системы сигналов, т.е. выделить для них каналы связи. По одной физической линии, связи можно организовать большое число каналов связи.
В системах местного и дистанционного управления для каждого вида передаваемых распорядительных сигналов требуется отдельная физическая линия связи (например, отдельный поездкой провод). В системах телеуправления передатчики осуществляют кодирование сигналов – преобразование их в импульсные или высокочастотные. При этом для каждой системы сигналов нет необходимости в отдельной физической линии связи, достаточно лишь выделить определённый диапазон несущих частот для каждой из них или как-то иначе подразделить эти системы сигналов, т.е. выделить для них каналы связи. По одной физической линии, связи можно организовать большое число каналов связи.
В системах телеуправления возможно применение односторонней и двусторонней связи. При односторонней связи (рис. 10.17а) возможно только управление по разомкнутому циклу, т.е. только получение на ПУ информации о ходе каких-либо процессов на КП. В более распространённых системах с двусторонней связью (рис. 10.17б) передаются распорядительные сигналы как прямой, так и обратной связи от чувствительных элементов ЧЭ. На КП имеется обычно своя местная система автоматики и устройства управления УУ для каждого объекта ОУ.
В соответствии с назначением обычно различают:
– системы телеуправления (ТУ) осуществляют передачу информации в виде команд на включение и отключение агрегатов электроподвижного состава, на изменение уставок различных регуляторов.
– системы телесигнализации (ТС) передают дискретную информацию о состоянии агрегатов электроподвижного состава.
– системы телеизмерения (ТИ) осуществляют передачу из мерительной информации. В частности, такой информацией является результат измерения тока управляемого на расстоянии электровоза, его скорости, напряжения на токоприемнике, давления в тормозной магистрали и т.д.
– системы телеконтроля (ТК) являются частным случаем телеизмерения и телесигнализации. В этих системах на контролируемом пункте осуществляется измерение контролируемой величины и сравнение результата измерений с допустимым значением параметра. Информация о нахождении измерительного параметра в поле допуска или о выходе этого параметра за допустимые значения передается на пункт управления по тракту телесигнализации.
 – системы телерегулирования (ТР) реализуют управление на расстоянии объектами с бесконечным множеством состояний на базе систем ТУ-ТС-ТИ. Информация о состоянии объекта управления ОУ (рис. 10.18) по тракту ТС-ТИ передается с контролируемого пункта КП на управляющее устройство УУ пункта управления ПУ. Устройство управления, получив информацию о состоянии ОУ и сравнив его с внешней информацией (в частности, это может быть программа управления), вырабатывает управляющее воздействие и передает его по тракту ТУ на объект управления контролируемого пункта. По существу, получаем замкнутую систему автоматического управления на расстоянии. В автоматических системах управляющее устройство реализуется, как правило, на базе средств вычислительной техники. В автоматизированных системах роль управляющего устройства играет диспетчер (или машинист головного локомотива при телерегулировании вспомогательным локомотивом в составе соединенного поезда).
– системы телерегулирования (ТР) реализуют управление на расстоянии объектами с бесконечным множеством состояний на базе систем ТУ-ТС-ТИ. Информация о состоянии объекта управления ОУ (рис. 10.18) по тракту ТС-ТИ передается с контролируемого пункта КП на управляющее устройство УУ пункта управления ПУ. Устройство управления, получив информацию о состоянии ОУ и сравнив его с внешней информацией (в частности, это может быть программа управления), вырабатывает управляющее воздействие и передает его по тракту ТУ на объект управления контролируемого пункта. По существу, получаем замкнутую систему автоматического управления на расстоянии. В автоматических системах управляющее устройство реализуется, как правило, на базе средств вычислительной техники. В автоматизированных системах роль управляющего устройства играет диспетчер (или машинист головного локомотива при телерегулировании вспомогательным локомотивом в составе соединенного поезда).
– системы передачи данных (СПД) используются для обмена дискретной информацией между уровнями управления. В частности, аппаратура передачи данных (АПД) обеспечивает передачу информации между уровнями централизованной системы автоведения, реализованной на базе типовых средств вычислительной техники.
Линия связи – физическая среда, по которой передаются сигналы. Под сигналом понимают физический носитель сообщения для передачи телемеханических сигналов используются линии связи: проводные, световодные, радиотракт, контактная сеть. В случае передачи по одной линии связи различных сигналов реализуется уплотнение линии связи, т. е. создание нескольких каналов связи.
Система телеуправления ЭПС – наиболее перспективное направление развития комплексных систем управления ими. В большинстве случаев, автоматизировав управление одиночными локомотивами; нельзя полностью решить задачу автоматизации процесса движения поездов на участке или направлении. Для повышения пропускной и провозной способности необходима сопряженная автоматизация всех локомотивов и управление ими как единой системой. Такую задачу можно решать только, применяя автотелеуправление локомотивами и движением поездов. Эффект телеуправления тем выше, чем больше пассажи или грузопотоки на участке.
 Структура систем автотелеуправления зависит от целей, поставленных при их создании. В простейшем случае система может предусматривать автоматическое сопряженное управление движением поездов в пределах участка или линии без использования обратных связей и без корректировки движения. Подобные разомкнутые системы простейшего телеуправления возможны лишь тогда, когда результаты воздействия всех возмущений могут быть компенсированы изменением продолжительности стоянки на промежуточных и концевых остановочных пунктах. Систему можно эффективно применять только, если продолжительность стоянки tc>Δtп, где Δtп – отклонение времени движения на перегоне. Это возможно, когда уровень возмущений сравнительно невелик (особенно, если невелики колебания нагрузки). Поэтому система пригодна для отдельных линий метрополитена и некоторых видов промышленного электрического транспорта.
Структура систем автотелеуправления зависит от целей, поставленных при их создании. В простейшем случае система может предусматривать автоматическое сопряженное управление движением поездов в пределах участка или линии без использования обратных связей и без корректировки движения. Подобные разомкнутые системы простейшего телеуправления возможны лишь тогда, когда результаты воздействия всех возмущений могут быть компенсированы изменением продолжительности стоянки на промежуточных и концевых остановочных пунктах. Систему можно эффективно применять только, если продолжительность стоянки tc>Δtп, где Δtп – отклонение времени движения на перегоне. Это возможно, когда уровень возмущений сравнительно невелик (особенно, если невелики колебания нагрузки). Поэтому система пригодна для отдельных линий метрополитена и некоторых видов промышленного электрического транспорта.
В подобной разомкнутой системе телеуправления (рис. 10.19) используются только сигналы ТУ, подаваемые от центрального поста к объектам управления.
На центральном посту управления программное устройство ПРУ выдает в зависимости от времени задающие сигналы gп(t), которые поступают в контрольно-смещающее устройство КСУ, обеспечивающее смещение их во времени для различных поездов. При этом

где Δtj – заданные интервалы следования поездов; обычно Δt1 = Δt2=…= Δti= Δt.
При этом
 gп1(t)= gп п[t– (п–1)Δt].
gп1(t)= gп п[t– (п–1)Δt].
Пройдя через кодирующее устройство КУУ, сигналы Σgп i(t) через передатчик ПД и каналы связи поступают на поезда в виде кодов Σкgп i(t). Здесь их воспринимают приемники ПР1…ПРп и после декодирования в декодирующих устройствах локомотивов ДКУ1…ДКУп они поступают в систему управления локомотива в виде задающих сигналов gп 1…gп п (поездных).
На элементе графика движения поездов при такой разомкнутой системе телеуправления (рис. 10.20) жирными линиями показаны нитки планового графика, который при правильном выборе исходных показателей можно считать математическим ожиданием процесса движения поездов. Здесь интервал между поездами Δt постоянный (жёсткий) и задается заранее.
Под влиянием возмущений фактическую продолжительность движения на перегоне tпф можно рассматривать как случайную величину, близкую к значению этого времени tп, определяемому графиком. При правильном выборе tп его можно считать математическим ожиданием величины tпф.
Отклонения процессов движения представлены на рисунке тонкими линиями. В рассматриваемой системе время стоянки tс представляет собой тот ресурс регулирования, за счет которого компенсируются все неточности управления и все воздействия возмущений. Этот ресурс не безграничен, так как всякое увеличение времени стоянок вызывает снижение участковой скорости vc:
vc =L/(Σtп + Σ tс),
где L – длина участка; Σtп, Σ tс – общие времена соотвётственно движения на перегонах и стоянок в пределах участка.
При телеуправлении возможны два предельных случая корректирования режимов работы локомотивов и движения поездов: первый — корректирование распространяется на все управляемые поезда, второй – на их ограниченное число, в предельном случае на один поезд. В этих случаях необходима различная рабочая информация, различна и структура цепей обратной связи. В первом случае это должна быть какая-то обобщенная информация, например об изменении общих грузопотоков на линии, во втором – достаточна информация о фактическом продвижении каждого поезда (по соответствующим цепям обрат ной связи).
Системы диспетчерского автоматического телеуправления локомотивами. Повышенный уровень возмущений и многорежимность работы электровозов предъявляют к системам телеуправления особые требований. В этом случае наиболее приемлемы системы диспетчерского автоматического телеуправления. Это иерархические системы, в которых индивидуальное (бортовое) автоматическое управление локомотивом дополнено сопряженным диспетчерским управлением совокупностью поездов.
Под диспетчерским управлением, которое может быть и неавтоматическим, понимают дискретную настройку систем управления от дельными объектами по общим законам сопряженного управления. На железнодорожном транспорте часто такое управление сводится к ускорению или замедлению продвижения отдельных поездов для оптимизации перевозочного процесса.
В дальнейшем будем рассматривать только системы диспетчерского управления, в которых широко применяются современные средства автоматики и телеуправления. Такое управление следует осуществлять прежде всего на локомотивах с широким применением САР различного назначения и систем автомашиниста. В перспективных системах необходимо также использовать такие возможности систем диспетчерского управления, как сопряженное автоуправление не только раз личными объектами, но и различными системами или подсистемами. Такая система предусматривает индивидуальное автоматическое управление объектами (локомотивами), корректируемое в соответствии с задачами, стоящими перед всей сопряженной системой участка, дороги, направления, узла.
В связи с этим нет необходимости осуществлять непрерывную телесвязь между локомотивами и центральным постом управления. Эта связь может быть спорадической и устанавливаться на очень короткие промежутки времени. Возможно применять различные средства связи, но представляется, что в рассматриваемых условиях наиболёе целесообразна периодическая связь между локомотивами и фиксированными напольными постами связи.
Например, связь между локомотивами и постом осуществляется дискретно через напольные посты контроля ПК и информации НИ (рис. 10.21), в принципе они могут быть территориально не связаны, однако по ряду причин целесообразно их совмещать. Через эти посты между ЦПУ и локомотивами устанавливается двусторонний обмен сигналами ТУ и телеконтроля ТК (в некоторых случаях возможно и сигналами ТИ).
На локомотиве сигналы телеконтроля (а также телеизмерений) Σхк в кодирующих устройствах КК кодируются в сигналы Σкхк, а затем с помощью передатчика ПДК передаются на напольные посты НИ. Вследствие дискретности связи соответствующая информация должна в устройствах КК, ПДК и НИ предварительно накапливаться.
 На ЦПУ кодированные сигналы принимаются приемниками ПРК и декодируются в декорирующих устройствах ДКК. В дальнейшем как рабочая информация эти сигналы поступают в решающее устройство РУ, создавая цепь обратной связи.
На ЦПУ кодированные сигналы принимаются приемниками ПРК и декодируются в декорирующих устройствах ДКК. В дальнейшем как рабочая информация эти сигналы поступают в решающее устройство РУ, создавая цепь обратной связи.
Решающее устройство РУ может иметь двустороннюю связь с внешними источниками информации ВИ, представляющими собой другие сопряженные системы (на пример, систему тягового электроснабжения). Очевидно РУ должно представлять собой устройство, способное выполнять вычислительные и логические операции, обладающее достаточно большим объёмом памяти. Не исключена необходимость непрерывного или периодического диспетчерского наблюдения, для чего должен быть предусмотрен специальный пульт УДН.
Сигналы ТУ с РУ поступают в кодирующее устройство КУ и затем передатчиками ПДУ передаются на посты ПК, а оттуда в виде кодированных сигналов управления Σкху – на локомотив в момент установления связи между ним и НК. На локомотиве сигналы принимаются приемником ПРУ и после декодирования в устройствах ДКУ в виде поступают в логическое устройство ЛУ, предназначенное для ввода их в систему САУ или САР локомотива с целью настройки соответствующих подсистем.
Объём передаваемой информации ТУ и ТИ зависит от того, какие задачи ставятся, перед системой диспетчерского управления. Он может быть небольшим, если необходимо, например, лишь воздействовать на процесс продвижения поездов. Объём информации значительно расширяется, если наряду с этим ставятся дополнительные задачи, относящиеся, например, к оптимизации режимов работы локомотивов. Вследствие периодичности использования каналы связи будут в такой системе обладать большой избыточностью. Возможны некоторые способы ее снижения. Например, можно использовать одни и те же каналы связи для нескольких напольных постов.
В принципе система, приведённая на рис. 10.21, позволяет решить все основные задачи автоматического телеуправления электровозами, а также задачи сопряженного управления различными транспортными системами.
 Система автоведения поездов Ленинградского метрополитена. Опоздание поездов на метрополитене вызывается обычно задержками на станциях, так как при децентрализованном питании контактного рельса обеспечивается хорошая стабильность питающего напряжения, а изменение веса поезда в зависимости от наполнения вагонов пассажирами в достаточной мере компенсируется авторежимом.
Система автоведения поездов Ленинградского метрополитена. Опоздание поездов на метрополитене вызывается обычно задержками на станциях, так как при децентрализованном питании контактного рельса обеспечивается хорошая стабильность питающего напряжения, а изменение веса поезда в зависимости от наполнения вагонов пассажирами в достаточной мере компенсируется авторежимом.
Если поезд прибывает к номинальной точке перехода на выбег с некоторым опозданием Δτ0, то для компенсации этого опоздания переход на выбег надо произвести позднее, увеличив длительность режима тяги на время ΔТд. Таким образом, корректировка осуществляется по времени.
Рассмотрим кривые движения поезда по некоторому перегону (рис. 10.22). Линии 0-1-4-5 и 0-1′-4′-5′ изображают зависимости v(S) и t(S) при номинальном режиме движения, соответствующем заданному времени хода поезда Тпр, а линии 0-2-3-5 и О′-2′-3′-5′ – при отправлении поезда с предыдущей станции с опозданием Δτ и прибытием на следующую станцию точно по расписанию. В точке номинального перехода на выбег (точка 1) поезд будет иметь опоздание Δτ0.
Переход на выбег в номинальном режиме осуществляется в точке 1 на расстоянии Sдн от начала перегона при скорости v0н, время выбега и торможения Т0н. Если необходимо нагнать опоздание Δτ, переход на выбег осуществляется в точке 2. Зависимость между величиной Δτ0 и дополнительным временем работы двигателей ΔТд линейна и определяется уравнением (10.5).
Для реальных перегонов зависимости ΔТд(Δτ0) могут несколько отличаться от прямой линии вследствие влияния переломов профиля в пределах участка пути ΔS0 а также некоторого изменения кs и кv по мере удаления от точки номинального перехода на выбег. Однако эта нелинейность несущественна.
Система состоит из центрального пункта управления, путевых устройств и поездного оборудования. Передача команд с центрального пункта управления на путевые устройства производится по кабельным линиям связи, а сигналов от путевых устройств к поездному оборудованию – путем электромагнитной индукции.
Центральный пункт управления выдает сигналы программного времени отправления поездов с конечных и промежуточных станций, а также сигналы программного времени проследования поездами контрольных точек на перегонах в соответствии с графиком движения.
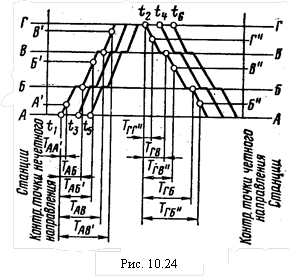
 Данные о программном времени отправления поездов с конечных станций закодированы в устройстве ввода программы УВ центрального поста управления ЦПУ (рис. 10.23). Суточная программа зафиксирована в нескольких вариан-тах (на обычный день, выходной день, часы пик и пр.). На ЦПУ име-ется не менее двух УВ, в одном из которых происходит считывание про-граммы, а на другом может быть заблаго-временно установле-на и отстроена заме-щающая программа; поэтому одну про-грамму можно заме-нить другой практи-чески мгновенно и в любой момент вре-мени. Устройство ввода выдает сигна-лы отправления нечетных поездов с конечной станции А в моменты времени t1, t3, t5, ... и чётных с конечной станции Г в моменты t2, t4, t6, ... (рис. 10.24). При параллельном графике движения поездов времена ТАА′, ТАБ, ТАБ′, ТАВ, ТАВ′ от момента отправления с промежуточных станций Б и В, а также до момента проследования контрольных точек А′, Б′, В′ на перегонах одинаковы. Это же относится и к временам ТГГ″, ТГВ, ТГВ″, ТГБ, ТГБ″ для четных поездов.
Данные о программном времени отправления поездов с конечных станций закодированы в устройстве ввода программы УВ центрального поста управления ЦПУ (рис. 10.23). Суточная программа зафиксирована в нескольких вариан-тах (на обычный день, выходной день, часы пик и пр.). На ЦПУ име-ется не менее двух УВ, в одном из которых происходит считывание про-граммы, а на другом может быть заблаго-временно установле-на и отстроена заме-щающая программа; поэтому одну про-грамму можно заме-нить другой практи-чески мгновенно и в любой момент вре-мени. Устройство ввода выдает сигна-лы отправления нечетных поездов с конечной станции А в моменты времени t1, t3, t5, ... и чётных с конечной станции Г в моменты t2, t4, t6, ... (рис. 10.24). При параллельном графике движения поездов времена ТАА′, ТАБ, ТАБ′, ТАВ, ТАВ′ от момента отправления с промежуточных станций Б и В, а также до момента проследования контрольных точек А′, Б′, В′ на перегонах одинаковы. Это же относится и к временам ТГГ″, ТГВ, ТГВ″, ТГБ, ТГБ″ для четных поездов.
Сигналы программного отправления поездов с конечных станций передаются в путевые устройства (шкафы автоведения) этих станций и одновременно в программно-задающую машину П3М (см. рис. 10.23). Она вырабатывает для соответствующих промежуточных станций и перегонов выходные сигналы, сдвинутые относительно входных на интервалы времени ТАА′, ТАБ, ТАБ′, ТАВ, ТАВ′.
Путевые устройства предназначены для передачи сигналов управления на поезда. Вдоль пути на деревянных досках уложена одновитковая петля из изолированного провода, которая питается от отдельного генератора высокой частоты. Значение передаваемых сигналов определяется частотами генераторов. Так, для передачи сигналов «Ход», «Торможение», «Открытие правых дверей», «Открытие левых дверей» используют частоты 20, 25, 32, 42 кГц. Эти устройства принято называть программами.
Сигнал отправления поезда поступает в программу хода, если включились следующие реле: РПО под действием сигнала программного отправления, поступи с ЦПУ, реле РВмин при фактическом времени стоянки поезда на станции, превышающем установленный минимум, и реле Р3О при разрешающем сигнале выходного светофора. В случае, когда сигнал программного отправления по каким-либо при чинам не поступит, контактами реле РВмакс генератор частоты хода будет подключен к программе хода после того, как время фактической стоянки поезда превысит установленный максимум. Поездное оборудование воспримет сигнал от программы хода и поезд отправится.
В конце программы хода расположен фотодатчик, фиксирующий момент проследования поедом контрольной точки. Он состоит из фотоприемника с фоторезистором и светильника, расположенного на противоположной стороне пути. Проходя мимо контрольной точки, поезд прерывает луч света, направленный на фотоприемник, в результате чего срабатывает реле, включенное в цепь фоторезистора Если поезд следует без опоздания, то сигнал фотодатчика о фактическом проследовании поезда через контрольную точку приходит одновременно с сигналом с центрального поста о программном времени. Программа нагона не включается и поезд, дойдя до конца программы хода, переходит на выбег.
Если поезд имеет опоздание, то сигнал фотодатчика поступает в блок нагона несколько позже сигнала с центрального поста. Блок нагона измеряет промежуток времени между этими сигналами Δτ0, устанавливает дополнительное время включения двигателей ΔТд и на это время подключает генератор частоты хода к программе нагона. Величина ΔТд определяется в зависимости от Δτ0 по уравнению (10.5).
Служебное торможение осуществляется реостатным тормозом под контролем токового реле торможения. При скоростях ниже 10…15 км/ч он замещается пневматическим тормозом.
На подходе к станции включается двухступенчатая система прицельного торможения с последовательными программами.
Тормозная программа выполнена в виде одновитковой петли о многократным перекрещиванием и постоянно подключена к генератору частоты торможения. Шаг перекрещивания
ΔSт пр = vзΔtэ,
где vз – скорость, определяемая по программной кривой рис. 10.7 для каждой точки пути; Δtэ – эталонное время.
При движении поезда вдоль тормозной программы в приемных катушках индуктора наводится переменная ЭДС, которая резко падает до нуля в точках перекрещивания петли. Поэтому сигналы торможения имеют импульсный характер. Преобразователь этих сигналов сравнивает длительность импульсов, поступающих на его вход, с эталонным временем и при их равенстве выдает команду на включение первой ступени автоматического реостатного торможения. Также выдаются команды на включение второй ступени торможения.
 Кроме того, эта система автоматически осуществляет подтормаживание поезда на затяжных спусках, торможение поезда перед запрещающим сигналом, открывание и закрывание дверей вагонов и станций закрытого типа и оборот поезда в тупиках конечных станций. Функции машиниста сводятся к включению системы и контролю за её работой.
Кроме того, эта система автоматически осуществляет подтормаживание поезда на затяжных спусках, торможение поезда перед запрещающим сигналом, открывание и закрывание дверей вагонов и станций закрытого типа и оборот поезда в тупиках конечных станций. Функции машиниста сводятся к включению системы и контролю за её работой.
Система автоведения поездов Московского метрополитена. Система (рис. 10.25) построена по иерархическому принципу трёхступенчатого телеуправления.
Высшая ступень управления продвижением поездов – центральный пост управления ЦПУ, задающий программу движения поездов на линии как совокупность интервалов попутного следования, стоянок и времен хода по перегонам. Эти сигналы, вырабатываемые на ЦПУ программным устройством ПРУ, через передатчик ПД ТУ по каналам связи ТУ подаются на вторую ступень управления – в станционные устройства СУ. Каждое СУ управляет поездами одного направления движения на одном перегоне, формируя команды, подаваемые на них по каналам прямой связи ПС с помощью индуктивных датчиков прямой связи. Для этого в состав СУ входит устройство управления отправлением поездов УО и устройство выключения тяговых двигателей (тяги) УВТ. От них на поезд поступают команды отправления, выключения двигателей, открытия дверей в др.
Система управления поезда представляет собой третью ступень; она воспринимает команды с помощью приемников ПР КУ, откуда через логическое устройство ЛУ они поступают в исполнительные устройства НУ, Помимо команд от СУ, на поезд подаются также команды от пассивных датчиков ПД и датчиков торможения ДТ1, ДТ2, т. е. напольных элементов, установленных на перегоне и выдающих постоянные сигналы. В рассматриваемой системе с помощью таких элементов выдаются сигналы торможения и сигналы, необходимые для отключения тяговых двигателей устройством отключения тяговых двигателей.
Оно представляет собой простейшее вычислительно-управляющее устройство и выдает команду на отключение тяговых двигателей при выполнении условия
Тпр – Тдi > Т0i ,
где Тпр – программное время хода по рассматриваемому перегону; Тдi – время хода от предыдущей станции до i-того путевого датчика; Т0i – расчетное время хода на выбеге по оставшейся части перегона, если тяговые двигатели выключить у i-того датчика.
Путевые датчики располагают так, чтобы расчетное время движения на выбеге при отключении тяговых двигателей у i-того датчика было на 1 с меньше, чем при отключении их у предыдущего (i – 1) датчика, т.е.
Т0 i = Т0 i-1 – 1 или Т0 i = Т01 – (i – 1),
где i – количество пройденных путевых датчиков; Т01 – расчетное время хода на выбеге при отключении тяговых двигателей у первого датчика.
Тогда
Тпр – Тдi ≥ Т01 – (i – 1) или Тпр – Т01 ≥ Тдi – (i – 1)
Контроль за выполнением последнего неравенства осуществляет программное вычислительное устройство отключения тяговых двигателей УВТ а помощью каналов обратной связи ОС. При этом УВТ выдаёт по каналу ПС сигнал на отключение тяговых двигателей, который поступает на поезд, после прохождения через ближайший путевой индукционный датчик.
Алгоритм отключения тяговых двигателей поясняют кривые движения поездов t(L) на перегоне между станциями А и Б (рие. 10.26). Здесь Г – кривая движения для средних расчётных условий (соответствует графику движения); О – для поезда, отправленного со станции А с опозданием, а прибывшего на станцию Б в назначенное время для поезда Г тяговые двигатели должны быть включены на участке пути от станции А до точки Lг, а от этой точки и до станции Б поезд должен двигаться с выключенными двигателями. Для поезда О тяговые двигатели необходимо выключать наболъшем расстоянии от стаиции А в точке Lо. На основе расчётов для каждого перегона и опытной проверки, учитывая различные вероятвостные условия движения поездов, можно получить зависимость tвт(L) представленную в виде кривой В. Она определяет необходимые точки выключения тяговых двигателей при условии, что рассмотренные поезда прибудут на станцию Б вовремя. Здесь величина tвт‚ равна разности между tхз и ординатами кривой В.
Точки L1 и Lп соответствуют границам участка, на котором должны выключаться тяговые двигатели при различных условиях. Точка L1 определена из условия минимальной допустимой скорости прибытия поезда на станцию Б, а точка Lп соответствует условиям ограничения по максимальной допустимой скорости движения или условиям рационального расхода энергии.
Время tпр(L) можно определить как
tвт= tвтб – tпр(L). (10.16)
Функцию tпр(L) можно назвать функцией вагона и определять по графику В. Величина tвтб (как видно из рис. 10.26) – максимальное значение tвт соответствующее точке L1. Из выражения (10.16) получим уравнение, положенное в основу алгоритма работы УВТ
t – (tхз – tвтб) – tпр(L)=0. (10.17)
 УВТ выдает команды на выключенце тяговых двигателей, когда левая часть уравнения (10.17) меньше или равна нулю. Если поезд имеет ходовые характеристики более благоприятные (кривая Г1 на рис. 10.26), чем расчётный (кривая Г), то его двигатели будут выключены при значении Lг1<Lг. Увеличение продолжительности выбега в этом случае компенсирует ускоренный разгон поезда при включённых тяговых двигателях. При худших ходовых характеристиках поезда (кривая Г2) двигатели будут выключены позже в точке, соответствующей Lг2>Lг, что также компенсирует отклонение ходовых характерйстик поезда. Таким образом, принятый принцип построения алгоритма обладает свойством в какой-то мере автоматически компенсировать отклонения в процессе движения поездов, которые вызываются отклонениями их ходовых характеристик: различиями в нагрузке, разницей в диаметрах бандажей колесных пар и другими причинами.
УВТ выдает команды на выключенце тяговых двигателей, когда левая часть уравнения (10.17) меньше или равна нулю. Если поезд имеет ходовые характеристики более благоприятные (кривая Г1 на рис. 10.26), чем расчётный (кривая Г), то его двигатели будут выключены при значении Lг1<Lг. Увеличение продолжительности выбега в этом случае компенсирует ускоренный разгон поезда при включённых тяговых двигателях. При худших ходовых характеристиках поезда (кривая Г2) двигатели будут выключены позже в точке, соответствующей Lг2>Lг, что также компенсирует отклонение ходовых характерйстик поезда. Таким образом, принятый принцип построения алгоритма обладает свойством в какой-то мере автоматически компенсировать отклонения в процессе движения поездов, которые вызываются отклонениями их ходовых характеристик: различиями в нагрузке, разницей в диаметрах бандажей колесных пар и другими причинами.
В тех алучаях, когда эти различия велики и их нельзя полностью компенсировать таким путем (например, для поездов из вагонов различных серий), соответствующие коррективы вводят в процессе работы УВТ. Для этого предусматривается подача в УВТ сигналов специальными датчиками ДПВ, информирующими о серии вагонов поезда.
Рабочую информацию о выполнении функции tпр(L) можно получить, если в промежутке между точками L1 и Lп установить напольные датчики (ДВ-ДОС) в такой последовательности, чтобы для любой точкц пути количество их от точки L1 было пропорционально tпр для этой точки. Сигналы этих датчиков позволяют корректировать время хода поездов на перегонах.
Программы торможения поездов на станциях – трёхступенчатые, обеспечивающие разомкнутую систему прицельного торможения. Для них использованы пассивные путевые датчики, представляющие собой пакеты шихтованной стали. При проходе над таким датчиком катушки поездного индуктора резко возрастает ее индуктивное сопротивлёние и снижается ток в цепи катушки. Возникающие при этом в приемных устройствах поезда сигналы имеют импульсный характер.
Команда начала ступени торможения выдается, когда продолжительность импульса соответствует эталонному времени.
Станционные устройства связаны с ЦПУ цепью обратной связи, в которую входят передатчик, каналы и приемники ТС, устройства исполнительных сигналов УИС и диспетчерского контроля ДК.
Автономные системы автоведения и системы автоведения для электровозов и электропоездов. Централизованные системы автоведения поездов позволяют в полной мере решать задачу автоматического управления совокупностью поездов на участке. Для осуществления таких систем, работающих по принципу телеуправления, требуется большое число каналов связи. Экономически оправдано применение централизованных систем лишь при значительном числе однотипных поездов на участке. Иногда, особенно при небольших объёмах движения, более выгодно использовать системы автономного автоведения поездов. Применять автономные системы целесообразно и в условиях скоростного движения поездов.
Повышение скоростей движения и усложнение оборудования требует освобождения машиниста от всё большего числа операций управления и передавать их автоматическим системам. При этом управление тяговыми процессами ЭПС обычно сводится к регулированию скорости движения. Автоматическая система выполняет все операции переключений в цепях управления ЭПС при пуске, торможений или для поддержания скорости на заданном уровне. Наиболее совершенные из подобных систем – системы «автомашинист» – вьполняют сложные функции управления. Они обе печивают соблюдение графика движения, осущеатвление целевого (прицельного) торможения, воздействие на процессы движения по сигналам АЛС (об изменение скорости). В ряде случаев на эти системы возлагают также функции автоматической оптимизации режимов работы локомотивов по каким-то определённым показателям, например, по минимальному расходу энергии на тягу.
 В состав системы управления высокоскоростного ЭПС (рис. 10.27а) входят элементы, обеспечивающие подчиненное регулирование скорости v. Это регулятор тока РТ и регулятор скорости РС с задатчиком тока ЗТ, определяющим задаваемый ток Iз в зависимости от рассогласовяния по скорости Δv. Рассогласование определ-яяется как разница заданной vз и фактической v скоростей: Δv=vз–v. Значение vз устанав-ливается как наименьшее из трех возможных: vз КМ, vз 0 и vз ЦТ (рис. 10.27б). Здесь vз КМ – предельное значение (огра-ничение) скорости, задаваемое машинистом с помощью кон-троллера управления КМ; vз 0 – ограничение скорости, зада-ваемое блоком ограничений скорости, реализующим по-стоянные ограничения, заранее заложенные в него, а также ограничения, вызываемые по-казаниями АЛС; vз ЦТ – пере-менное ограничение скорости, задаваемое блоком целевого торможения автомашиниста. Этот блок вырабатывает зависимость скорости поезда от тормозного пути, обеспечивающего остановку поезда в заданном месте – у платформы или перед сигналом.
В состав системы управления высокоскоростного ЭПС (рис. 10.27а) входят элементы, обеспечивающие подчиненное регулирование скорости v. Это регулятор тока РТ и регулятор скорости РС с задатчиком тока ЗТ, определяющим задаваемый ток Iз в зависимости от рассогласовяния по скорости Δv. Рассогласование определ-яяется как разница заданной vз и фактической v скоростей: Δv=vз–v. Значение vз устанав-ливается как наименьшее из трех возможных: vз КМ, vз 0 и vз ЦТ (рис. 10.27б). Здесь vз КМ – предельное значение (огра-ничение) скорости, задаваемое машинистом с помощью кон-троллера управления КМ; vз 0 – ограничение скорости, зада-ваемое блоком ограничений скорости, реализующим по-стоянные ограничения, заранее заложенные в него, а также ограничения, вызываемые по-казаниями АЛС; vз ЦТ – пере-менное ограничение скорости, задаваемое блоком целевого торможения автомашиниста. Этот блок вырабатывает зависимость скорости поезда от тормозного пути, обеспечивающего остановку поезда в заданном месте – у платформы или перед сигналом.
Блоки ограничений скорости и целевого торможения работают по сигналам счетчика пройденного пути, который непрерывно вычисляет путь, пройденный поездом, производя интегрирование сигналов скорости, поступающих от датчика скорости ДС. В автомашинисте имеется также блок перехода на выбег, который в соответствии со временем хода по перегону, заданным программой движения, определяет необходимые моменты отключения тяговых двигателей, например, перед остановками или перед элементами пути, на которых ограничена скорость движения поездов.
Независимо от отмеченных ограничений скорости, задаваемых автомашинистом, машинист может по своему усмотрению снижать скорость поезда с помощью контроллера КМ. Этим удовлетворяются основные требования обеспечения безопасности движения, так как машинист может реагировать на любые непредвцденные ситуации, которые могут возникнуть при движении поезда, не вызывая реакции автомашиниста.
 В рассмотренную комплексную систему может входить двухконтурная система регулирования режимов работы тяговых двигателей (рис. 10.28). Ее внешний контур (центральный блок управления) имеет один канал, по которому передаются сигналы v, Δv, Iз – общие для всех групп тяговых двигателей. Внутренний контур разделён на столько одинаковых параллельных канна-лов, сколько имеется групп тяговых двигателей ТД1…ТДп.
В рассмотренную комплексную систему может входить двухконтурная система регулирования режимов работы тяговых двигателей (рис. 10.28). Ее внешний контур (центральный блок управления) имеет один канал, по которому передаются сигналы v, Δv, Iз – общие для всех групп тяговых двигателей. Внутренний контур разделён на столько одинаковых параллельных канна-лов, сколько имеется групп тяговых двигателей ТД1…ТДп.
Кроме тяговых двигате-лей, в каждый канал входят: исполнительные элементы в виде преобразовательных устройств ПР1…ПРп, блоки управления ими Р1…Рп, выполняющие функции элементов управления, элементы сравнения СУ1…СУп, выявляющие рассогласование по току в каждом канале ΔI1 … ΔIп. Общий задающий сигнал ΔI для всех каналов и раздельное регулирование по каждому каналу обеспечивают равномерное распределение нагрузки между группами тяговых двигателей.
 Пока не достигнуто ограничение по скорости vогр происходит разгон поезда, диаграмма которого приведена на рис. 10.29. Участок 0а соответствует включению тяговых двигателей при токе Iтр, обеспечивающем трогание поезда с места; аb – постепенному нарастанию тока до предельного значения с интенсивностью, соответствующей интенсивности нарастания ускорения в пределах не выше 0,5…0,6 м/с3; bс – стабилизации пускового тока до момента выхода на естественную характеристику полного поля; эта стабилизация может быть заменена программным регулированием, обеспечивающим изменение пускового тока в соответствии с его ограничением по условиям сцепления; сd – стабилизации пускового тока регулированием возбуждения, которая может быть заменена программным регулированием тока, обеспечи-вающим постоянство силы тяги; dе – разгону по естественной характеристике при наибольшем ослаблении возбуждения до заданного ограничения по скорости; еfd – снижению тока сначала путем усиления возбуждения, затем снижением напряжения двигателей до тех пор, пока сила тяги не сравняется с сопротивлением движению поезда и не установится постоянная скорость vогр.
Пока не достигнуто ограничение по скорости vогр происходит разгон поезда, диаграмма которого приведена на рис. 10.29. Участок 0а соответствует включению тяговых двигателей при токе Iтр, обеспечивающем трогание поезда с места; аb – постепенному нарастанию тока до предельного значения с интенсивностью, соответствующей интенсивности нарастания ускорения в пределах не выше 0,5…0,6 м/с3; bс – стабилизации пускового тока до момента выхода на естественную характеристику полного поля; эта стабилизация может быть заменена программным регулированием, обеспечивающим изменение пускового тока в соответствии с его ограничением по условиям сцепления; сd – стабилизации пускового тока регулированием возбуждения, которая может быть заменена программным регулированием тока, обеспечи-вающим постоянство силы тяги; dе – разгону по естественной характеристике при наибольшем ослаблении возбуждения до заданного ограничения по скорости; еfd – снижению тока сначала путем усиления возбуждения, затем снижением напряжения двигателей до тех пор, пока сила тяги не сравняется с сопротивлением движению поезда и не установится постоянная скорость vогр.
Рассмотренные системы автоведения с автономным управлением свойственны большинству скоростных локомотивов: электровозов и электропоездов. В частности, подобные системы применены на скоростном электровозе постоянного тока ЧС200 и скоростном электропоезде ЭР200.
На электровозе ЧС200 в качестве исполнительных элементов исполызован реостатный контроллер, осуществляющий также переключение группировок тяговых двигателей, и импульсный преобразователь для плавного регулирования возбуждения. Эти элементы используют как в режиме тяги, так и при реостатном торможении. Подобные исполнительные элементы применены и на электропоезде ЭР200, но импульсные преобразователи здесь использованы не только для плавного регулирования возбуждения, но и для плавного межступенчатого регулирования сопротивления пускового реостата. Практиче для стабилизации скорости используют только зону ходового регулирования, т.е. регулирование возбуждения путём его ослабления. При этом пусковые реостаты полностью выведены. При нескольких группировках тяговых двигателей и глубоком ослаблелии возбуждения эта зона охватывает почти весь используемый диапазон скоростей, свойственных скоростному движению.
Функциональная схема системы автоведения электровоза ЧС200 (рис. 10.30) представляет собой разновидность систем описанных ранее.
 Машинист воздействует на систему, прежде всего задавая ограничение скорости vр с помощью набора кнопок Кн, выполняющих роль кнопочного контроллера управления. Переключатель П позволяет машинисту задавать предельные значения пускового и тормозного тока. Функции системы «автомашинист» выполняет комплект блоков Б1…Б4. Блок Б1 осуществляет вычисление отклонения от заданного времени хода; блок Б2 хранит заданный график движения и заданные ограничения скоростей. Блок Б4 управляет целевым торможением в соответствии с сигналами, поступающими через приемные катушки КПр на дешифратор Дш АЛС, а также с сигналами бесконтактных точечных (путевых) датчиков ДП2…ДП4. Последние подают сигналы в характерных точках пути, соответетвующих остановочным пунктам, началу участков с ограничениями скорости, и служат точками корректировки пройденного пути. Такая корректировка необходима потому, что основная информация о пройденном пути вырабатывается в систем автоведения в результате интегрирования сигналов скорости vS, поступающих от скоростемера Ск. При этом всегда могут возникать некоторые накапливающиеся неточности, например, в результате даже незначительной пробуксовки колесных пар. Поступление в систему сигналов от датчиков ДП позволяет корректировать необходимую информацию именно в те моменты, когда требуются точные данные о месте расположения поезда. Приблизительно такое же значение для работы блока Б4 имеют сигналы, поступающие о дешифратора АЛС, которые также дублируются индикатором Инд.
Машинист воздействует на систему, прежде всего задавая ограничение скорости vр с помощью набора кнопок Кн, выполняющих роль кнопочного контроллера управления. Переключатель П позволяет машинисту задавать предельные значения пускового и тормозного тока. Функции системы «автомашинист» выполняет комплект блоков Б1…Б4. Блок Б1 осуществляет вычисление отклонения от заданного времени хода; блок Б2 хранит заданный график движения и заданные ограничения скоростей. Блок Б4 управляет целевым торможением в соответствии с сигналами, поступающими через приемные катушки КПр на дешифратор Дш АЛС, а также с сигналами бесконтактных точечных (путевых) датчиков ДП2…ДП4. Последние подают сигналы в характерных точках пути, соответетвующих остановочным пунктам, началу участков с ограничениями скорости, и служат точками корректировки пройденного пути. Такая корректировка необходима потому, что основная информация о пройденном пути вырабатывается в систем автоведения в результате интегрирования сигналов скорости vS, поступающих от скоростемера Ск. При этом всегда могут возникать некоторые накапливающиеся неточности, например, в результате даже незначительной пробуксовки колесных пар. Поступление в систему сигналов от датчиков ДП позволяет корректировать необходимую информацию именно в те моменты, когда требуются точные данные о месте расположения поезда. Приблизительно такое же значение для работы блока Б4 имеют сигналы, поступающие о дешифратора АЛС, которые также дублируются индикатором Инд.
Блок Б3 осуществляет считывание сигналов блоков Б2 и Б4 и выдаёт сигналы ограничения скорости vб на логический блок ЛБ. Здесь этот сигнал сравнивается с аналогичными сигналами vрг и vв, поступающими непосредственно от блоков Б2 и Б4 и из них выбирается сигнал, соответствующий наименьшему значению скорости vv. В логическом элементе ЛЕ ограничение скорости может быть откорректировано непосредственно машинистом. Блок ЛБ представляет собой комплект логических элементов И, выбирающих после минимальное значение заданной скорости из нескольких значений поступающих от различных блоков.
В блок Б1 поступают в качестве сигналов, корректирующих место нахождение поезда, сигналы точечных путевых датчиков ДП1, расположенных на границе станций. Эти сигналы корректируют момент запуска считывающего устройства блока Б3 в начале каждого перегона.
На регулятор скорости РС поступают сигналы блока ЛЕ, задающие ограничения скорости, а также от блока Б2 сигналы начала выбега (отключения тяговых двигателей). В свою очередь блок РС выдает задающие сигналы на регулятор тока РТ, а также на блоки управления реостатным тормозом БУРТ и электропневматическим БУЭТ.
Система автоматического управления тормозами предусматривает обеспечение правильной последовательности применения обоих видов тормозов с учетом ограничения мощности реостатното тормоза. Блок управления тормозами БУТ осуществляет их необходимое замещение в зависимости от сигналов, подаваемых в него регулятором РТ и регулятором ограничения мощности РОМ. Такая система позволяет исключить перегрузку тяговых двигателей при работе их в режиме электрического торможения без ущерба для процесса торможения. Кроме того, по условиям обеспечения безопасности движения, машинист может непосредственно управлять электропневматическим тормозом с помощью крана машиниста Кр.
В лекции "Дифференциал функции - определение, геометрический смысл. Доказать инвариантность формы дифференциала первого порядка" также много полезной информации.
С помощью разъёмного соединения Р система автоведения подключена к контрольному пульту на посту управления ПУ, что позволяет машинисту контролировать работу системы «автомашинист», а также вносить некоторую начальную информацию для корректирования ра боты системы (например, данные о массе поезда).
Рассмотренные автономные системы получают распространение в первую очередь на электропоездах и пассажирских элвктровозах, где наиболее благоприятны условия для их внедрения вследствие относительной стабильности режимов работы таких локомотивов – небольших колебаний массы поезда, сопротивления движению и пр. Это также относится и к некоторым видам локомотивов промышленного транспорта.
Вместе с тем на современных электровозах все более широко применяется автоматическое регулирование отдельных процессов, особенно на электровозах, имеющих сложные преобразовательные установки: например, на электровозах с бесколлекторными тяговыми двигателями, с импульсными преобразователями и т.д. Без систем автоматического регулирования создание ряда наиболее перспективных электровозов вообще невозможно. Од-нако для грузовой электровозной тяги еще нет достаточно отработанных и установившихся системавтоведения.
Широкое внедрение систем автоматического регулирования создаёт предпосылки для разработки на их базе систем автоведения. Наиболее существенное значение в этом случае имеет переход от систем автоматической стабилизации к системам программного регулирования.
По своим задачам и методам программное регулирование наиболее близко к автоматическому управлению. В этом случае для создания автономной системы автоведении может оказаться достаточным лишь сопряжение отдельных систем автоматического программного регулирования, т.е. объединение их в общую систему в качестве подсистем с согласованными управляющими воздействиями. Такие условия практически имеются на электровозах бесколлекторными тяговыми двигателями, с независимым функциональным возбуждением тяговых двигателей и др. для получения наиболее рациональных характеристик здесь неизбежно применяется программное регулирование, а автоматизация сложных преобразовательных установок требует сопряжения отдельных систем регулирования. Это хорошо видно на примере электровозев 8Л80Т, ВЛ80Р, опытных образцов электровозов с асиихронными и вентильными двигателями.
В еще большей степени, чем для электропоездов и пассажирсквж электровозов, в грузовом движении наибольший эффект дают не автономные системы автоматического управления, а централизованные, обеспечивающие автоматизацию управлени целыми участками, узлами.


















