
Общая характеристика задач синтеза и принципы коррекции
1. Общая характеристика задач синтеза и принципы коррекции.
2. Особенности синтеза САР ЭПС.
3. Синтез САР ЭПС с нелинейными звеньями.

 |
Рассмотренные в ранее процедуры оценки устойчивости и качества регулирования относятся к задачам анализа. При этом исходят из того, что система регулирования полностью задана, т. е. известны ее структура и параметры. В отличие от этого процедуру на хождения структуры и параметров системы (или ее части), обеспечивающих выполнение требований устойчивости и качества, называют синтезом.
В общем случае под синтезом системы автоматического регулирования понимают направленный расчет, выполняемый для отыскания рациональной структуры системы и определения оптимальных значений параметров отдельных звеньев. Такая задача имеет множество решений, и выбор наиболее рационального из них выполняют, как правило, инженерными, а не математическими методами.
На практике, чаще всего, решая задачу синтеза, считают, что определенная неизменная часть системы задана и требуется выбрать дополнительную часть системы, обеспечивающую выполнение необходимых требований к устойчивости и качеству процессов регулирования. К неизменной части САР относят основные функциональные элементы (управляющий, исполнительный и чувствительный), а также объект регулирования, выбранные в соответствии с техническим заданием. Расчет и проектирование дополнительной части системы упрощаются, если эта часть составлена из типовых корректирующих звеньев. В электрических системах в качестве корректирующих звеньев используют четырехполюсники.
Ограничимся рассмотрением способов решения задачи синтеза, со стоящей в определении схемы и параметров корректирующих звеньев (дополнительной части САР). Тогда задача для линейных систем наиболее просто решается с помощью логарифмических частотных характеристик.
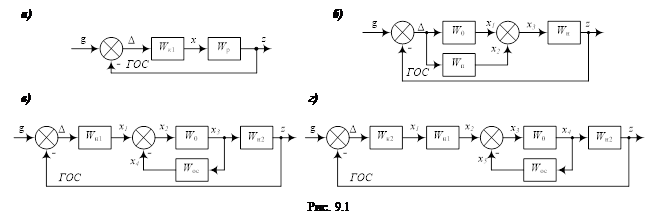
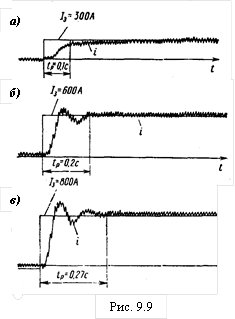
Принципы коррекции. В зависимости от схемы включения корректирующих звеньев различают последовательную, параллельную, параллельно-встречную (включение корректирующего звена в обратную связь) и комбинированную коррекцию (рис. 9.1). Примем следующие обозначения передаточных функций: Wр(р) –передаточная функция разомкнутой не скорректированной (исходной) системы; Wкi(р), Wп(р) и Wос(р) – соответственно последовательного, параллельного и параллельно-встречного корректирующих звеньев; W0(р) – части системы, охваченной корректирующим звеном (изменяемая часть системы); Wнi(р) передаточные функции частей системы, не охваченных корректирующим звеном (неизменяемых частей системы).
Рекомендуемые материалы
При этом следует иметь в виду, что
 .
.
В линейных системах всегда можно корректирующее звено одного типа заменить эквивалентным корректирующим звеном другого типа, т.е. использование любой схемы включения корректирующих элементов позволяет получать полностью подобные в динамическом отношении системы. Переход от одной схемы включения к другой, эквивалентной ей, можно выполнить, приравняв передаточные функции разомкнутых скорректированных систем Wск р(р), получающиеся при соответствующих схемах коррекции:
– при последовательной коррекции (рис. 9.1а)
Wск р(р)= Wк1(р)Wр(р); (9.1)
– при параллельной коррекции (рис. 9.1б)
Wск р(р)=[W0(р) + Wп(р)] Wн(р) = Wр(р) + Wп(р) Wн(р); (9.2)
– при параллельно-встречной коррекции (рис. 9.1в)
 ; (9.3)
; (9.3)
– при комбинированной коррекции (рис. 9.1г)
 . (9.4)
. (9.4)
Из уравнений (9. 1)…(9.4) следует, что:
 ;
;
 ;
;
 .
.
Включение корректирующих звеньев в обратную связь применяют чаще, чем параллельную коррекцию. Это легче реализовать, так как на их входы поступает сигнал мощностью, большей уровня мощности в точке системы, к которой подключен выход цепи обратной связи Применение отрицательных обратных связей снижает влияние нелинейностей в охваченной части системы и уменьшает влияние нестабильности ее параметров.
 Для повышения качества комбинированных систем регулирования корректирующие звенья можно включать в цепь задающих и возмущающих воздействий (рис. 9.2). Они могут оказывать влияние на качество регулирования только по тем цепям, к которым подключены (g или q). Устранить влияние других воздействий можно только корректирующими звеньями, включенными в замкнутый контур САР. Коррекция по внешним воздействиям не влияет на устойчивость системы.
Для повышения качества комбинированных систем регулирования корректирующие звенья можно включать в цепь задающих и возмущающих воздействий (рис. 9.2). Они могут оказывать влияние на качество регулирования только по тем цепям, к которым подключены (g или q). Устранить влияние других воздействий можно только корректирующими звеньями, включенными в замкнутый контур САР. Коррекция по внешним воздействиям не влияет на устойчивость системы.
Влияние последовательных и параллельных корректирующих звеньев на качество процесса регулирования. Последовательные и параллельные корректирующие звенья позволяют наиболее просто реализовать желаемый закон регулирования – зависимость управляющего сигнала от рассогласования, т.е. выбрать тип регулятора. На практике такие корректирующие звенья реализуют на базе операционных усилителей.
Пропорциональный регулятор (П-регулятор) осуществляет на исполнительный элемент воздействие, пропорциональное рассогласованию:
х = КкΔ,
где Кк – коэффициент усиления последовательного корректирующего звена.
 Его передаточная функция
Его передаточная функция
Wрег(р) = Кк.
Эти регуляторы обычно применяют в статических САР. Их установившаяся ошибка зависит от коэффициента усиления: Δу= g0/(1+К). Её снижают, повышая К. Для этого применяют последовательную коррекцию и включают усилительное звено (рис. 9.3а).
П-регулятор получают, включая на вход и в обратную связь операционного усилителя резисторы (рис. 9.3б). Передаточная функция такой схемы
 .
.
Во избежание насыщения операционного усилителя допустимое изменение входного напряжения должно удовлетворять условию:
 .
.
Частотные и временные характеристики такого регулятора тождественны соответствующим характеристикам безынерционного (усилительного) звена.
Интегрирующий регулятор (И-регулятор) оказывает на исполнительный элемент воздействие, пропорциональное интегралу рассогласования:
 . (9.5)
. (9.5)
Его передаточная функция
 .
.
Структурная схема САР с И-регулятором аналогична схеме, приведенной на рис. 9.3а. Системы регулирования с И-регуляторами имеют астатизм 1-го порядка. Их статическая ошибка по положению равна нулю, но имеется статическая ошибка по скорости Δv =vg /Кv= vg /(КрегК), для снижения которой надо увеличивать Крег = =1/Ти. Для получения закона регулирования, описываемого выражением (9.5), при последовательной коррекции включают интегрирующее звено. Последовательное включение двух интегрирующих звеньев устраняет статические ошибки по положению и скорости, но САР становится структурно-неустойчивой. Чтобы обеспечить её устойчивость, обычно включают дополнительные корректирующие звенья в цепь обратной связи. И-регулятор выполняют на базе операционного усилителя (рис. 9.4), передаточная функция которой

Если скачкообразный входной сигнал поддерживается длительно, то операционный усилитель может дойти до насыщения и через время t=│(их макс – их мин)│/Δи станет неуправляемым.
 Дифференцирующий регулятор (Д-регулятор) осуществляет воздействие на исполнительный элемент в соответствии с законом
Дифференцирующий регулятор (Д-регулятор) осуществляет воздействие на исполнительный элемент в соответствии с законом
 .
.
Передаточная функция регулятора
Wрег(р)= Тд р.
Регулятор получают, включая дифференцирующее звено при последовательной коррекции. Д-регуляторы используют только в сочетании с регуляторами других типов.
Пропорционально-интегрирующий регулятор (ПИ-регулятор) оказывает на исполнительный элемент воздействие, пропорциональное рассогласованию и интегралу от рассогласования,
 . (9.6)
. (9.6)
Его передаточная функция соответствует изодромному звену
 ,
,
 где Тиз=КкТи – постоянная времени изодромного звена.
где Тиз=КкТи – постоянная времени изодромного звена.
Такую передаточную функцию можно получить, включив параллельно усилительное и интегрирующее звенья (рис. 9.5а).
В переходном режиме при t→0 или р→∞ ПИ-регулятор ведёт себя как усилительное звено, а в установившемся режиме он придает САР астатизм 1-го порядка. Структурную схему, приведенную на рис. 9.5а, можно рассматривать как схему с последовательной коррекцией, считая, что звено Wрег(р) включено последовательно с разомкнутой САР. Можно считать также, что система имеет параллельную коррекцию, если рассматривать звено с передаточной функцией Кк как составную часть САР, а звено с передаточной функцией 1/(Ти) как корректирующее.
Техническая реализация ПИ-регулятора выполняется на базе одного операционного усилителя (рис. 9.5б), передаточная функция этой схемы
 .
.
При скачке входного сигнала Δи выходной сигнал вначале также изменяется скачком на │Кк Δи │ а затем линейно нарастает – второе слагаемое выражения (9.6) (рис. 9.5в).
ПИ-регуляторы применены в блоке автоматического управления электровоза ВЛ85.
Пропорционально-дифференцирующий регулятор (ПД-регулятор) оказывает на исполнительный элемент воздействие, пропорционально рассогласованию и производной от рассогласования,
 .
.
Передаточная функция такого звена
Wрег(p) = Кк+ Тд р = Кк (1 + Трег р).
Эту передаточную функцию можно реализовать, включая параллельно усилительное и дифференцирующее звенья аналогично тому, как это показано на рис. 9.5а для усилительного и интегрирующего звеньев. В установившемся режиме эта схема работает как пропорциональный регулятор, но при изменении входного сигнала Δ к выходному сигналу х регулятора добавляется ещё сигнал, соответствующий скорости изменения входного сигнала.
Реализация регулятора возможна по одной из двух схем включения операционного усилителя (рис. 9.6а и б). Передаточная функция первой схемы
 , (7.7)
, (7.7)
а для второй схемы
 . (9.8)
. (9.8)
 Как видно из уравнений (9.7) и (9.8), обе схемы эквивалентны.
Как видно из уравнений (9.7) и (9.8), обе схемы эквивалентны.
При скачке входного сигнала Δи (рис. 9.6в) выходное напряжение также скачком меняется на │ΔиА│ а затем плавно уменьшается до │КкΔи│. Площадь фигуры асе составляет Sace= (иА – КкΔи)Тд/2 откуда можно найти иА. В действительности, из-за насыщения усилителя конденсатор С2 зарядится до напряжения их макс, а затем будет разряжаться по кривой dе. Площадь фигуры аbdе останется равной Sace, и работа регулятора не будет искажена насыщением. В этом преимущество схемы, приведенной на рис. 9.6а.
Для демпфирования собственных колебаний напряжения усилителя в схему включают дополнительный резистор R.
Пропорционально-интегрально-дифференцирующий регулятор (ПИД-регулятор) оказывает на исполнительной элемент воздействие, пропорциональное рассогласованию, интегралу и производной от этого рассогласования,
 .
.
Передаточная функция регулятора
Такую передаточную функцию можно реализовать, включив параллельно усилительное, интегрирующее и дифференцирующее звенья.
ПИД-регулятор имеет более высокие показатели качества регулирования, чем регуляторы других типов. Он обеспечивает астатизм 1-го порядка и повышает запас устойчивости благодаря наличию дифференцирующего звена.
Помимо рассмотренных регуляторов, на практике применяют и другие более сложные регуляторы.
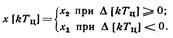
Рассмотренные регуляторы получили широкое применение для управления не только линейными, но и нелинейными системами. Поскольку расчеты процессов регулирования в нелинейных системах выполняют в основном на ЭВМ, то практический интерес представляет запись законов регулирования в дискретной форме. Эти законы записывают обычно в следующем виде.
– для П-регулятора
х[kTц]=КкΔ[kTц], (9.9)
где k – номер шага расчета; Tц – шаг временнóй дискретизации (см. рис. 5.5г);
– для И-регулятора
 , (9.10)
, (9.10)
где N – количество шагов расчета.
– для Д-регулятора
 . (9.11)
. (9.11)
В этих уравнениях операция интегрирования заменена суммированием по методу прямоугольников, а производная заменена разностью первого порядка. Для получения законов регулирования ПИ-, ПД- и ПИД-регуляторов достаточно сложить соответствующие законы (9.9)…(9.11).
Влияние параллельно-встречно включенных корректирующих звеньев на качество процесса регулирования. Параллельно-встречно включенными называют корректирующие звенья, введенные в цепи дополнительных обратных связей, которые подразделяют на жёсткие и гибкие. Жесткие обратные связи осуществляются позиционными звеньями, т.е. звеньями с передаточной функцией Wос(0) ≠ 0, а гибкие обратные связи – звеньями дифференцирующего типа, т.е. такими, у которых передаточная функция Wос(0) = 0. У звеньев дифференцирующего типа в установившемся режиме при t→∞ или при р → 0 сигнал на выходе не появляется, поэтому гибкая обратная связь действует только в переходных (динамических) режимах.
Передаточная функция идеальной жёсткой обратной связи
Wос(0) =Кос
Если эта обратная связь охватывает апериодическое звено 1-го порядка с передаточной функцией
 ,
,
то передаточная функция разомкнутой скорректированной системы
 ,
,
где Кск=К (1± ККос)-1 и Тск=Т (1± ККос)-1.
Таким образом, в результате охвата апериодического звена 1-го порядка жесткой обратной связью его постоянная времени и коэффициент усиления изменяются в (1 ± ККос) раз, уменьшаясь при отрицательной обратной связи и увеличиваясь при положительной (в случае положительной обратной связи должно выполняться условие 0<ККос<1). На практике применяют, как правило, отрицательную обратную связь, так как её введение уменьшает постоянную времени (инерционность) охватываемого звена. Одновременно отрицательная обратная связь уменьшает влияние нелинейности статической характеристики охватываемого звена и нестабильности его параметров. Кроме того, при наличии помех на входе звена уменьшается уровень помех на его выходе.
При охвате жесткой обратной связью разомкнутой САР в (1±ККос) раз изменяются все коэффициенты полиномов Е(р) и F(р). В частности, если в качестве Wр(р) принять инерционное звено 2-го порядка с передаточной функцией  , то охват этого звена жёсткой обратной связью приводит к тому, что передаточная функция разомкнутой скорректированной системы примет вид
, то охват этого звена жёсткой обратной связью приводит к тому, что передаточная функция разомкнутой скорректированной системы примет вид
 ,
,
где Кск=К (1± ККос)-1,  и
и  .
.
При этом коэффициент относительного затухания п снижается:
 .
.
Если инерционное звено 2-го порядка апериодическое (п≥ 1), то уменьшение п – полезно. Для колебательного звена (п < 1) уменьшение п нежелательно, так как повышается колебательность системы регулирования.
При охвате жесткой обратной связью интегрирующего звена с пере даточной функцией Wр(р)= 1/(Тр) имеем:
 ,
,
где Кск= 1/Кос и Тск= Т/Кос.
Таким образом, интегрирующее звено превращается в инерционное звено 1-го порядка. Практический интерес при этом представляет только отрицательная обратная связь, так как при положительной обратной связи получается неустойчивое звено (корень характеристического полинома становится положительным).
Применение отрицательной обратной связи позволяет понизить порядок астатизма системы. Так, для разомкнутой САР с астатизмом 1-го порядка  в состав которой входят последовательно включённые интегрирующее звено и инерционное звено 1-го порядка, охват обратной связью приводит к тому, что скорректи рованная система становйтся статической:
в состав которой входят последовательно включённые интегрирующее звено и инерционное звено 1-го порядка, охват обратной связью приводит к тому, что скорректи рованная система становйтся статической:
 ,
,
где Кск = 1/Кос;  и Т1ск = 1/(ККос).
и Т1ск = 1/(ККос).
Это свойство жесткой обратной связи широко применяют для коррекции систем с излишне высоким порядком астатизма.
Инерционную жесткую обратную связь осуществляют, включая апериодическое звено 1-го порядка с переда точной функцией
 .
.
Применение такой связи изменяет значение коэффициентов полиномов числителя и знаменателя Wск р(р) на единицу по сравнению с порядком полиномов охватываемой системы. Поэтому коррекция с применением инерционной жесткой обратной связи в качестве положительной снижает быстродействие.
Идеальную гибкую обратную связь (обратная связь по скорости) осуществляют, включая дифференцирующее звено с передаточной функцией
Wос(р) = Тр.
Если передаточная функция разомкнутой САР имеет вид Wp(р)= К/f(р), то охват САР гибкой обратной связью изменит значение коэффициента при р в первой степени:
 .
.
Охват апериодического звена 1-го порядка такой отрицательной связью снижает, а положительной — повышает быстродействие. Если отрицательной гибкой обратной связью охватить колебательное звено, то коэффициент относительного затухания возрастёт. Это эффективное средство снижения колебательности переходного процесса.
Инерционную гибкую обратную связь осуществляют, включая звено с передаточной функцией
 .
.
Инерционность этой связи дает такой же эффект, как и инерционность при жесткой обратной связи, причем отрицательная обратная связь повышает быстродействие системы, а положительная – снижает. Широко используют охват такой связью интегрирующего звена. В этом случае инерционную гибкую обратную связь называют изодромной.
В начале переходного процесса при t→ 0 и р →∞ такая связь эквивалентна усилительному звену Wос(р)≈ ≈Кос/Тос (единицей в знаменателе можно пренебречь). Охваченное этой связью интегрирующее звено ведет себя как инерционное; возникает возможность повысить коэффициент усиления системы и, следовательно, быстродействие в начале переходного процесса. По мере замедления переходного процесса при t→∞ или р → 0 сигнал на выходе звена об ратной связи снижается до нуля. Интегрирующее звено начинает вести себя как звено, не охваченное обратной связью, обеспечивая астатизм системы регулирования.

Системы автоматического регулирования тока и скорости ЭПС имеют особенности, связанные со спецификой работы подвижного со става и отдельных его элементов. Так, например, для обеспечения нормальной работы тиристорных исполнительных элементов, как уже говорилось ранее, в состав регулятора необходимо включать интегрирующее звено. Поэтому контуры регулирования токов якоря и возбуждения должны иметь не ниже 1-го порядка астатизма.
Другой особенностью САР ЭПС является существенная нелинейность характеристик исполнительных элементов и объектов регулирования. Поэтому для этих САР перспективно применение нелинейных регуляторов.
Кроме того, нелинейности характеристик намагничивания двигателей, а также тяговых и скоростных характеристик приводят к тому, что с изменением заданного значения тока меняются и параметры объекта регулирования, т.е. возникает его нестационарность. На нестационарность системы большое влияние оказывает изменение активных сопротивлений тягового двигателя с нагревом, а также изменение активного и индуктивного сопротивлений контактной сети при передвижении ЭПС по перегону. Учет этого делает перспективным применение на ЭПС самонастраивающихся САР с идентификацией параметров объекта регулирования.
 Особые требования к выбору структуры САР ЭПС предъявляет необходимость обеспечения наилучших условий сцепления колес с рельсами. Учет этого фактора ведет к тому, что заданное значение тока якоря не может изменяться скачкообразно, а должно изменяться плавно. При этом экспериментально установлено, что нарастание тока, а, следовательно, и силы тяги при пуске должно быть интенсивным. Высокие значения коэффициента использования сцепной массы ЭПС обеспечиваются, если пусковой ток за время t1 возрастает до 0,75Iб, а дальнейшее его увеличение до Iб происходит замедленно (рис. 9.7а). Время t1 определяют по допустимой скорости нарастания ускорения поезда, которая не должна превышать [da/dt] = 0,50…0,7 м/с2.
Особые требования к выбору структуры САР ЭПС предъявляет необходимость обеспечения наилучших условий сцепления колес с рельсами. Учет этого фактора ведет к тому, что заданное значение тока якоря не может изменяться скачкообразно, а должно изменяться плавно. При этом экспериментально установлено, что нарастание тока, а, следовательно, и силы тяги при пуске должно быть интенсивным. Высокие значения коэффициента использования сцепной массы ЭПС обеспечиваются, если пусковой ток за время t1 возрастает до 0,75Iб, а дальнейшее его увеличение до Iб происходит замедленно (рис. 9.7а). Время t1 определяют по допустимой скорости нарастания ускорения поезда, которая не должна превышать [da/dt] = 0,50…0,7 м/с2.
Указанный режим изменения заданного значения тока якоря можно получить, если перед замкнутым контуром регулирования тока якоря (рис. 9.7б) включить звено, переходная функция которого приблизительно соответствует сплошной линии на рис. 9.7а. Таким звеном является апериодическое звено 1-го порядка Wa(р), переходная функция которого описывается известным выражением  и показана штриховой линией на рис. 9.7а. Коэффициент усиления этого звена равен единице, а постоянную времени можно определить по приближенной формуле Т≥ 2,12 ам, где ам – маневровое ускорение.
и показана штриховой линией на рис. 9.7а. Коэффициент усиления этого звена равен единице, а постоянную времени можно определить по приближенной формуле Т≥ 2,12 ам, где ам – маневровое ускорение.
Апериодическое звено можно получить на основе операционного усилителя (см. рис. 9.7в). Постоянная времени этой схемы τ =R2C2, а для получения коэффициента усиления, равного единице, необходимо принять R1=R2.
Значение маневрового ускорения не должно превышать, например: для одиночного электровоза 0,3…0,4 м/с2; для порожнего электропоезда – 0,4…0,5 м/с2; для поезда метрополитена – 0,5 м/с2.
Такой способ обеспечения наилучших условий сцепления использован на электровозе ВЛ85 (см. лекцию 6), где для обеспечения плавного изменения заданного значения тока применен задатчик интенсивности.
Ещё один способ решения этой задачи был показан при рассмотрении САР скорости движения электровоза (см. лекцию 7). В этой САР параметр х регулятора выбирался в зависимости от массы поезда и допустимой силы тяги с учетом ограничений на уровень продольных сил в поезде.
Особенности САР скорости ЭПС с релейно-контакторным управлением. Переходные процессы в САР скорости ЭПС с релейно-контакторным управлением описываются нелинейной системой дифференциальных уравнений (см. лекцию 7). При выбранной структуре регулятора под синтезом САР будем понимать выбор параметров регулятора, обеспечивающих оптимизацию показателей качества регулирования. В данном случае независимыми параметрами регулятора являются ширина зоны нечувствительности δ и такт работы регулятора Трег. Коэффициент усиления Ка при этом не может быть выбран произвольно. Он выбирается из условия равенства максимальных статических погрешностей при измерении скорости и величины Кааизм.
Обозначим максимальные статические погрешности измерения скорости еv и ускорения еа. Тогда еv = Каеа и Ка= еv /еа.
Введение производной в закон управления позволило получить в этой системе апериодический переходный процесс при разгоне поезда. Основным возмущающим воздействием в контуре регулирования скорости является дополнительное сопротивление движению от уклонов и кривых. Поскольку длительность переходных процессов при релейно-контакторном управлении сравнима с временем проезда одного элемента профиля, то процесс регулирования скорости можно рассматривать как суперпозицию переходных процессов, вызванных каждым изменением эквивалентного уклона пути. Очевидно, что в таком случае выделить наихудшее возмущение весьма сложно. Например, таким воздействием может оказаться чередование уклонов и спусков определенной длины. Однако на реальных участках железных дорог такое чередование, как правило, не встречается. Поэтому целесообразно рассматривать процесс регулирования скорости движения на реальных участках железных дорог.
Базой для исследования является математическая модель системы, описанная в лекции 7. Дополнительно необходимо учитывать также по грешности в трактах измерения скорости и ускорения.
Моделирование проводилось для участка Октябрьской дороги длиной 100 км, профиль на котором по классификации ВНИИЖТа может быть отнесен к типу ΙΙΙ. Масса состава менялась от 500 до 1200 т, уставка скорости от 80 до 140 км/ч. При моделировании учитывалось влияние ветра со скоростью до 7 м/с, а также падение напряжения от сопутствующих поездов при изменении межпоездного интервала от 7,5 до 50 мин.
По результатам моделирования оценивались следующие показатели качества регулирования скорости: среднее квадратичное отклонение фактической скорости от уставки σv максимальное превышение уставки Δvмакс, среднее количество переключений позиций переключателей ступеней управления и ослабления возбуждения М, средний КПД электровоза в процессе регулирования η. Чтобы получить обобщенную оценку указанных показателей качества, было проведено усреднение значений σv, М и η по всем «поездкам», моделируемым при различных значениях уставки и возмущающих воздействий. Одновременно с этим по всему диапазону изменения условий движения определялось максимальное значение отклонения Δvмакс.
Результаты расчетов, выполненных для электровоза ЧС2 (см. рис 9.8а, б) показывают, что введение отрицательной обратной связи по ускорению с коэффициентом усиления Ка = 8,49 с позволяет уменьшить среднее квадратичное отклонение скорости более чем в 2 раза, максимальное превышение заданной скорости – более чем в 3 раза, а среднее количество переключений – в 4…6 раз. При этом несколько возрастает и КПД электровоза, что, по-видимому, связано с уменьшением количества переключений ступеней управления, при котором снижается время хода на реостатных позициях.
Как следует из рис. 9.8а и б, рациональное значение такта регулятора для электровоза ЧС2 лежит в диапазоне от 4 до 6 с. В этих пределах все показатели качества регулирования скорости меняются весьма слабо, их значения близки к рациональным. С ростом порога чувствительности ухудшаются оценки среднего квадратичного отклонения и максимального отклонения скорости, однако снижаются количество переключений и КПД электровоза. Следует отметить, что при уменьшении δ с 2 до 1 км/ч точность регулирования скорости возрастает незначительно, поэтому рационально выбрать порог чувствительности равным 2 км/ч.
 Зависимости показателей качества для электровоза пере-менного тока ЧС4 от параметров регулятора имеют тот же характер, что и у электровоза ЧС2 (рис. 9.8в и г). Однако абсолютные значения оценок сред-него квадратичного от-клонения и максималь-ного отклонения скорости, а также среднего количества переключений здесь несколько ниже. Это связано с тем, что у электровоза ЧС4 ходовых позиций больше, чем у ЧС2, поэтому здесь легче подобрать позицию, обеспечивающую рав-номерное движение поезда при │Δv│≤ δ. Так как все позиции переключателя ступе-ней управления здесь являются ходовыми, КПД электровоза прак-тически не зависит от параметров регулятора. Рациональное значение такта регулятора в этом случае составляет 3…5 с, а порога чувствительности – 1 км/ч.
Зависимости показателей качества для электровоза пере-менного тока ЧС4 от параметров регулятора имеют тот же характер, что и у электровоза ЧС2 (рис. 9.8в и г). Однако абсолютные значения оценок сред-него квадратичного от-клонения и максималь-ного отклонения скорости, а также среднего количества переключений здесь несколько ниже. Это связано с тем, что у электровоза ЧС4 ходовых позиций больше, чем у ЧС2, поэтому здесь легче подобрать позицию, обеспечивающую рав-номерное движение поезда при │Δv│≤ δ. Так как все позиции переключателя ступе-ней управления здесь являются ходовыми, КПД электровоза прак-тически не зависит от параметров регулятора. Рациональное значение такта регулятора в этом случае составляет 3…5 с, а порога чувствительности – 1 км/ч.
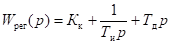
Особенности синтеза контура регулирования тока якоря. Традиционно в системах регулирования тока двигателей применяют ПИ-регуляторы. САР ЭПС с таким регулятором обеспечивают удовлетворительное качество переходных процессов (рис. 9.9а и б). Однако при больших скачках задающего воздействия в системе возникают переходные процессы со значительным перерегулированием. Так, из рис. 9.9в видно, что даже после выполнения процедуры оптимизации параметров регулятора при скачке задающего воздействия на 800 А возникает переходный процесс со значительным перерегулированием до σ= 20 %. Такой высокий уровень перерегулирования нежелателен для ЭПС, поэтому применение ПИ-регулятора целесообразно лишь при малых скачках задающего воздействия.
Известно, что существенное повышение качества регулирования в нелинейных системах может быть обеспечено за счет применения нелинейных регуляторов. Первое их преимущество заключается в возможности устранить или снизить влияние на работу САР какого-либо нелинейного звена. Пример решения такой задачи с помощью последовательного корректирующего звена был показан на рис. 8.27в, е. На ЭПС однофазно-постоянного тока этот способ получил широкое распространение для сглаживания косинусоидальности статической характеристики выпрямительных преобразователей. С этой целью на электровозах ВЛ80Р и ВЛ85 обеспечивают изменение управляющего сигнала по закону арккосинуса, при этом зависимость иd (α) получается линейной.
Большие преимущества нелинейные регуляторы имеют и при обеспечении требуемых показателей качества регулирования. Так, на пример, даже использование простейшего двухпозиционного регулятора РД позволяет повысить быстродействие САР, поскольку независимо от рассогласования Δ значение управляющего сигнала х будет либо максимальным, либо минимальным. Для сравнения напомним, что в линейных регуляторах сигнал х зависит от величины Δ.
В качестве нелинейных регуляторов широкое распространение получили элементы с пропорциональными, кусочно-линейными, разрывными и неоднозначными статическими характеристиками. Характеристики и уравнения некоторых из таких регуляторов приведены в приложении 6. Нелинейные регуляторы могут быть получены на основе комбинации различных характеристик, приведенных в этом приложении, а также при последовательном включении нелинейного и интегрирующего звеньев. Так, например, такое включение звена с двухпозиционной симметричной характеристикой и интегрирующего звена даёт так называемый регулятор постоянной скорости (РПСС), уравнение которого имеет вид
 ,
,
где х/Ти – скорость изменения управляющего воздействия.
Последовательное включение звена с четырехпозиционной характеристикой и интегрирующего звена даёт регулятор переменной скорости (РПНС)
 .
.
Кроме того, в закон управления могут быть введены и знаки производных, например,
 . (9.12)
. (9.12)
Регулятор с таким законом управления называют нелинейным логическим (НЛР). Введение в уравнение (9.12) второго слагаемого, зависящего от знака производной, изменяет скорость управляющего воздействия в зависимости от характера процесса в системе; вместе с тем отсутствие функциональной связи между скоростью управляющего воздействия и отклонением Δ обеспечивает плавность протекания процесса регулирования.
Задача синтеза нелинейных САР в общем случае не имеет решения: нельзя найти уравнение нелинейного регулятора, обеспечивающего выполнение требований к устойчивости и качеству регулирования. В таких задачах качество регулирования оценивают обычно установившейся ошибкой Δу временем регулирования tр, перерегулированием σ и амплитудой автоколебаний А. Эти показатели называют частными критериями оптимизации Ui. На практике невозможно найти параметры регулятора, обеспечивающего минимальные значения всех этих четырех критериев, так как характеристики регулятора влияют на Ui неоднозначно. В связи с этим синтез регулятора для нелинейных систем выполняют на основе методов многокритериальной оптимизации, в которых эта задача рассматривается как задача отыскания компромисса между отдельными частными критериями Ui.
Законы управления для некоторых регуляторов в дискретной форме приведены в таблице 9.1.
Таблица 9.1
| Регулятор | Дискретное управление регулятором |
| РД |
|
| РПСС |
|
| РПНС |
|
| НЛР |
|


Для контура регулирования тока якоря хорошие результаты даёт применение нелинейного логического закона (см. НЛР в табл. 9.1), который может быть представлен в виде:
 .
.
Поскольку этот закон имеет три параметра настройки ,
,  и Тц, то выбор их оптимальных значений выполнялся методом многокритериальной оптимизации. Некоторые результаты оптимизации для разных скачков задающего воздействия ΔIз приведены в табл. 9.2. Как видно из этой таблицы, наилучшие значения показателей
и Тц, то выбор их оптимальных значений выполнялся методом многокритериальной оптимизации. Некоторые результаты оптимизации для разных скачков задающего воздействия ΔIз приведены в табл. 9.2. Как видно из этой таблицы, наилучшие значения показателей
Таблица 9.2
| Значение параметра настройки | Величина скачка ΔIз, А | Значение показателя качества | |||
|
|
| σ, % | tр, с | A, А | |
| 3,89·10-5 | 3,89·10-5 | 300 600 800 | 0 0 0 | 0,58 1,0 1,36 | 0 0 0 |
| 7,78·10-5 | 7,78·10-5 | 300 600 800 | 0 0 0 | 0,37 0,66 1,0 | 30 20 0 |
| 3,89·10-5 | 7,78·10-5 | 300 600 800 | 0 0 0 | 0,37 0,66 1,0 | 30 60 70 |
| 7,78·10-5 | 3,89·10-5 | 300 600 800 | 0 30 10 | 0,3 0,52 0,63 | 45 60 80 |
качества регулирования при Тц= 10–2 с обеспечиваются при = = 7,78·10-5 с, что соответствует изменению фазы αр управляющего импульса на 1,4° за один полупериод.
Результаты испытаний электровоза ВЛ80Р-1767 с таким регулятором приведены на рис. 9.10 для режимов
тяги и рекуперативного торможения. Как видно из этого рисунка, изменение задающего воздействия Iяз машинист выполнял скачками. Скорость изменения задающего воздействия определяется задатчиком интенсивности, изменение фактического тока якоря происходит с удовлетворительными показателями качества регулирования при σ=0.
 Такой же регулятор был использован и для САР тока возбуждения; осциллограмма изменения iв приведенная на рис. 9.10г для режима рекуперации, также сви-детельствует о высоком качестве переходных процессов в САР с нелинейным логическим регулятором.
Такой же регулятор был использован и для САР тока возбуждения; осциллограмма изменения iв приведенная на рис. 9.10г для режима рекуперации, также сви-детельствует о высоком качестве переходных процессов в САР с нелинейным логическим регулятором.
 Особенности синтеза контура регу-лирования угла запаса инвертора. Сопоставим результаты, получаемые в системах регулирова-ния угла запаса по закону (6.1) – регулятор типа БРУЗ, применяе-мый на электровозах ВЛ8ОР и ВЛ85, и в замкнутой системе ста-билизации угла запаса. Функциональные схемы этих САР приведены на рис. 6.36, а переходные процессы описаны уравнениями в лекции 7.
Особенности синтеза контура регу-лирования угла запаса инвертора. Сопоставим результаты, получаемые в системах регулирова-ния угла запаса по закону (6.1) – регулятор типа БРУЗ, применяе-мый на электровозах ВЛ8ОР и ВЛ85, и в замкнутой системе ста-билизации угла запаса. Функциональные схемы этих САР приведены на рис. 6.36, а переходные процессы описаны уравнениями в лекции 7.
На рис. 9.11а приведены графики переходных процессов, полученные для регулятора угла запаса типа БРУЗ при скачкообразном снижении угла запаса с σз1=30° до σз2=20°. При этом время регулирования tр определялось как момент, начиная с которого выполняется условие │σ(tр) – σз2│≤ 5 %.
Как видно из рис. 9.11а, переходный процесс в регуляторе типа БРУЗ имеет низкочастотный колебательный характер и время регулирования tр= 0,13 с, т.е. оно равно 13 полупериодам питающего напряжения. Такое значение tр является очень высоким, так как за 13 полупериодов на систему могут подействовать различные возмущения, связанные с отклонением кривой напряжения от синусоидальной формы, с изменением напряжения в контактной сети из-за изменения режимов работы соседних электровозов и т.п. Кроме того, перерегулирование в этой системе σ= 40 %, что также является недопустимым.
Все это вместе взятое приводит к тому, что в эксплуатации для предотвращения опрокидывания инвертора заданное значение угла запаса увеличивают до 33…35о. При этом улучшается работоспособность ВИП в режиме инвертирования, но ухудшается коэффициент мощности электровоза.
Для повышения быстродействия системы автоматического регулирования угла запаса инвертора, помимо введения обратной связи по значению этого угла, хорошие результаты дает так называемое контурное регулирование. При этом формирование импульсов управления для работы каждого контура ВИП осуществляется на основе информации о значениях углов γ и δ в этих же контурах в предыдущем полупериоде их работы. Это связано с отклонениями электромагнитных характеристик контуров ВИП, образуемых в разные полупериоды. Такой принцип, несмотря на задержку с формированием управляющего сигнала на два полупериода, позволяет значительно повысить быстродействие системы.
На рис. 9.11б представлены графики переходных процессов, полученные при поконтурном регулировании в системе стабилизации угла по схеме, приведенной на рис. 6.36б. При этом в качестве регулятора Р применен И-регулятор, как и в регуляторе типа БРУЗ (см. рис. 6.36а) и соотношение (6.1). Как видно из рис. 9.11б, введение обратной связи по углу запаса и применение поконтурного регулирования обеспечило повышение быстродействия до трех полупериодов питающего напряжения и несколько снизило величину перерегулирования. Однако величина σ осталась еще недопустимо высокой. Дальнейшее улучшение качества регулирования может быть достигну то на основе замены И-регулятора более совершенным нелинейным логическим регулятором.
Особенности синтеза контура регулирования скорости электровоза в многоконтурных САР ЭПС. Рассмотрим работу САР скорости для электровоза с независимым возбуждением, так как такая САР может в зависимости от условий работы менять свою структуру от трех- до пятиконтурной (см. лекцию 7). Удовлетворительные показатели качества регулирования в такой системе были получены при зоне нечувствительности, равной 1 км/ч.
 Разгон поезда осуществляется на площадке за 90 с при постоянном ускорении до момента стабилизации скорости на уровне v=30,5 км/ч (рис. 9.12а). В момент времени t = 150 с поезд въехал на подъем i = 10‰, что вызвало увеличение заданного значения тока (Iз=830 А). Через 30 с переходный процесс в контуре тока закончился, причём текущее значение скорости стало v=29 км/ч, т.е. не вышло за пределы зоны нечувствительности. На этом участке в переходных процессах i(t) и v(t) при максимально возможном для маcсы поезда 3000 т темпе нарастания силы тяги в САР отсутствуют перерегулиро-вание и автоколебания, а статическая ошибка по скорости не превышает зоны нечувствительности регуля-тора скорости – 1 км/ч. Скачок заданного значения скорости vз до 55 км/ч вызвал переходный процесс в САР и переход ее в режим работы по четырехконтурной структуре, о чём свидетельствуют разные значения Iяз и Iвз. В момент времени t=350 с поезд имел скорость 56 км/ч.
Разгон поезда осуществляется на площадке за 90 с при постоянном ускорении до момента стабилизации скорости на уровне v=30,5 км/ч (рис. 9.12а). В момент времени t = 150 с поезд въехал на подъем i = 10‰, что вызвало увеличение заданного значения тока (Iз=830 А). Через 30 с переходный процесс в контуре тока закончился, причём текущее значение скорости стало v=29 км/ч, т.е. не вышло за пределы зоны нечувствительности. На этом участке в переходных процессах i(t) и v(t) при максимально возможном для маcсы поезда 3000 т темпе нарастания силы тяги в САР отсутствуют перерегулиро-вание и автоколебания, а статическая ошибка по скорости не превышает зоны нечувствительности регуля-тора скорости – 1 км/ч. Скачок заданного значения скорости vз до 55 км/ч вызвал переходный процесс в САР и переход ее в режим работы по четырехконтурной структуре, о чём свидетельствуют разные значения Iяз и Iвз. В момент времени t=350 с поезд имел скорость 56 км/ч.
Следующее изменение режима работы связано с тем, что в момент времени t= 400 с подъем увеличился с 7 до 10‰. При этом скорость движения уменьшилась до 54 км/ч, а в переходных процессах Iяз(t) и Iвз(t) не появились ни перерегулирования, ни автоколебания. После повышения заданного значения скорости движения до 75 км/ч Iвз стал уменьшаться и при t= 560 с соотношение Iвз/Iяз стало меньше 0,42. При этом САР перешла на работу по пятиконтурной структуре и регулятор скорости начал снижать величину Iяз до восстановления соотношения Iвз/Iяз ≥0,42.
Таким образом, САР автоматически осуществила работу системы в соответствии с ограничением по потенциальным условиям на коллекторе тяговых электродвигателей. Переходные процессы в этом режиме работы закончились через 70 с и в системе установилась скорость движения 75,5 км/ч на подъеме 5‰.
Увеличение подъема до 7‰ в момент времени t= 600 с привело к повышению необходимой силы тяги и, как следствие, к росту значений Iяз и Iвз. По окончании переходного процесса скорость движения установилась на уровне 74,5 км/ч при Iяз =750 А и Iвз=330 А. При этом САР вновь вернулась к четырехконтурной структуре работы.
В режиме рекуперативного торможения (рис. 9.12б) вход в рекуперацию выполнен на уклоне 5‰ при заданной скорости движения 85 км/ч. К концу этого участка пути скорость установилась на уровне 86 км/ч при переходе от трех- к четырехконтурной структуре. При повышении уклона до 7‰ увеличение тормозной силы про изошло в основном за счет роста Iяз.
Снижение заданного значения скорости движения до 70 км/ч в момент времени t=40 с вызвало переход САР на работу по пятиконтурной структуре. Этот режим сопровождался автоколебаниями тока якоря с амплитудой не более 50 А и тока возбуждения с амплитудой не более 25 А. Частота автоколебаний составила 2 Гц. Затем были заданы возмущения в виде изменения уклона и при достижении заданного значения скорости 70 км/ч был восстановлен первоначальный уклон 5‰. При этом САР перешла на работу по трехконтурной структуре, поддерживая скорость движения 69 км/ч; перерегулирование и автоколебания в системе отсутствовали.
В целом можно сделать вывод, что выбранная структура САР скорости для электровоза с независимым возбуждением тяговых двигателей обеспечивает максимальное быстродействие, отсутствие перерегулирования и значение статической ошибки, не превышающей ширину зоны нечувствительности регулятора скорости, равную 1 км/ч.
Следует иметь в виду, что рассмотренный алгоритм работы регулятора скорости может быть эффективно использован только при управлении пассажирскими и легкими грузовыми поездами. Для управления грузовыми поездами расчетной и повышенной массы требуется дополнительно решать задачи трогания поезда с места, движения по переломам профиля с минимумом динамических сил, возникающих как между локомотивом и поездом, так и между вагонами поезда. Рассмотрим кратко особенности решения последней задачи.
 В этом случае поезд следует рассматривать в виде цепочки твердых тел, соединенных упругодиссипативными связями. Параметры этих связей определяются характеристиками поглощающих аппаратов и продольной податливостью кузовов вагонов. При движении реальных поездов в междувагонных связях возникают значительные динамические силы, которые зависят как от параметров связей, так и от алгоритма работы регулятора скорости.
В этом случае поезд следует рассматривать в виде цепочки твердых тел, соединенных упругодиссипативными связями. Параметры этих связей определяются характеристиками поглощающих аппаратов и продольной податливостью кузовов вагонов. При движении реальных поездов в междувагонных связях возникают значительные динамические силы, которые зависят как от параметров связей, так и от алгоритма работы регулятора скорости.
Для снижения продольных сил, возникающих в переходных режимах движения поезда, т.е. при изменении профиля или режима движения, необходимо изменять величину х1 в уравнении регулятора скорости (7.36). При этом вместо зависимостей (7.37), (7.38) целесообразно использовать настроечную характеристику х1= f(тп, N),. построенную в результате решения задачи многокритериальной оптимизации (рис. 9.13). Здесь тп – масса поезда, N – количество вагонов. Перестройка параметра х1 регулятора скорости в соответствии с рис. 9.13 обеспечивает требуемые значения показателей качества регулирования, а также выполнение ограничений по уровню продольных динамических сил в поезде.


Как и для линейных САР, синтез нелинейных систем выполняют, включая линейные или нелинейные корректирующие звенья. Применяя линейные корректирующие звенья, рассмотренные ранее для коррекции нелинейных систем, можно реализовать заданный закон регулирования: пропорционально-интегральный, пропорционально-дифференциальный и пропорционально-интегрально-дифференциальный.
Дополнительные возможности открывает при синтезе САР применение нелинейных корректирующих звеньев. Первое их преимущество заключается в возможности устранить или снизить влияние на работу САР какого-либо нелинейного звена. Пример решения такой задачи с помощью последовательного корректирующего звена показан выше. Ту же задачу можно решить, применив линеаризацию с помощью вибрационных элементов, которая заключается в сглаживании нелинейности (например, зоны нечувствительности) с помощью высокочастотного сигнала.
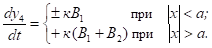
Вводя нелинейные корректирующие звенья даже в линейную систему можно устранить известное противоречие между быстродействием и колебательностью и обеспечить независимое выполнение требований по каждому из показателей качества регулирования. В линейной САР для повышения быстродействия, увеличивают коэффициент усиления разомкнутой системы, но это ограничено возрастающей колебательностью системы. С помощью линейной коррекции можно повысить быстродействие, но нельзя устранить указанное противоречие. Задачу можно решить, применив звено с монотонной статической характеристикой (рис. 9.14а) или включив параллельно релейные звенья (рис. 9.14б). В последнем случае выходная координата уз = В1+ В2 в начале процесса регулирования, когда │х │> а и уз= В1 при │х │< а.
 При последовательном включении для коррекции релейного и интегрирующего звеньев (см. рис. 8.24) скорость изменения входной величины управляющего элемента не зависит от величины рассогласования. Включение интегрирующего звена на выходе двух параллельных релейных звеньев (см. рис. 9.14б) позволяет реализовать две скорости изменения сигнала управляющего элемента
При последовательном включении для коррекции релейного и интегрирующего звеньев (см. рис. 8.24) скорость изменения входной величины управляющего элемента не зависит от величины рассогласования. Включение интегрирующего звена на выходе двух параллельных релейных звеньев (см. рис. 9.14б) позволяет реализовать две скорости изменения сигнала управляющего элемента
Норманнская колонизация - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
 Следовательно, независимость времени регулирования tр от скорости можно достигнуть, применяя не только звенья с астатизмом 2-го порядка, но и коррекцию с помощью нескольких релейных элементов. Например, можно предусмотреть постоянное параллельное включение двух корректирующих релейных элементов и нелинейного интегрирующего звена с ограничением выходной величины х4 (рис. 9.15а). При этом компенсируется снижение коэффициентов усиления кU и кβ двигателя в случае повышения скорости движения. В системах автоматического регулирования тяговых двигателей электропо-ездов принимают В2=(4…6)В1 и а=(0,2…0,3)gб, где gб – наи-большее значение входной величины корректирующего звена.
Следовательно, независимость времени регулирования tр от скорости можно достигнуть, применяя не только звенья с астатизмом 2-го порядка, но и коррекцию с помощью нескольких релейных элементов. Например, можно предусмотреть постоянное параллельное включение двух корректирующих релейных элементов и нелинейного интегрирующего звена с ограничением выходной величины х4 (рис. 9.15а). При этом компенсируется снижение коэффициентов усиления кU и кβ двигателя в случае повышения скорости движения. В системах автоматического регулирования тяговых двигателей электропо-ездов принимают В2=(4…6)В1 и а=(0,2…0,3)gб, где gб – наи-большее значение входной величины корректирующего звена.
Лучшие показатели качества регулирования можно получить, включая параллельно три и более идеальных релейных элемента с характеристиками по рис. 8.20е. Выходные сигналы х1, х2, х3 элементов РЭ1, РЭ2, РЭЗ (рис. 9.15б) связаны отношением В3>В2>B3. Переключение релей-ных элементов выполняет специальный элемент ПЭ в зависимости от сигнала z2, пропорционального скорости движения. При низких скоростях ПЭ подключает ко входу интегрирующего звена элемент РЭ1, а с увеличением скорости – сначала элемент РЭ2, а затем РЭ3.
Наилучших условий реализации сцепления колеc с рельсами, как и при синтезе линейных САР, достигают, включая на входе элемента сравнения инерционное звено 1-го порядка (см. рис. 9.1).
Применяя нелинейную коррекцию, можно обеспечить выполнение необходимых показателей качества регулирования САР ЭПС. При синтезе многоконтурных САР нелинейные корректирующие элементы обычно вводят лишь в контур регулирования тока.
Задача синтеза нелинейных систем не имеет общего решения. Выбирать параметры нелинейных корректирующих элементов приходится перебором вариантов, используя методы, рассмотренные выше при выполнении условий обеспечения заданных показателей качества процесса регулирования.


















