
Механика электропривода
2. Механика электропривода
2.1. Приведенное механическое звено
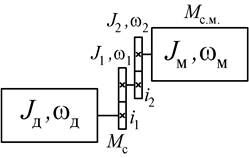
Механическая часть электромеханической системы включает в себя все связанные движущие массы: двигателя, передаточного устройства и исполнительного механизма машины. К ротору двигателя при скорости w приложен электромагнитный момент М, под действием которого механическая часть приводится в движение. Непосредственное представление о движущихся массах установки и механических связях между ними даёт кинематическая схема электропривода.
Примерная кинематическая схема электропривода с вращательным движением исполнительного органа представлена на рис. 2.1. Иногда рабочий орган механизма совершает поступательное движение (кран, лифт, строгальный станок, шлифовальный, долбежный и др.).
|
|
| Рис. 2.1. Кинематическая схема связи двигателя с исполнительным механизмом |
Каждый из элементов реальной кинематической цепи обладает упругостью, т.е. деформируется под нагрузкой, а в соединениях элементов имеются воздушные зазоры. Если учитывать все факторы, то расчетная схема будет очень сложной и расчет такой схемы выполняется на ЭВМ. Однако основные закономерности движения таких систем определяются наибольшими массами и зазорами и наименьшими жесткостями связей системы, что позволяет свести расчетную схему механической части привода к двухмассовой (иногда одномассовой) механической системе с эквивалентными упругими связями и с суммарным зазором, приведенным к угловой скорости вала двигателя.
Для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Обычно наиболее удобным является приведение их к скорости двигателя. Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии, то есть должны выполняться условия
Рекомендуемые материалы
 ;
;
 .
.
Откуда можно найти формулы приведения

Расчетную схему механической части привода в общем случае можно свести к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М, и суммарный приведенный к валу двигателя момент сопротивления (статической момент)  , включающий все механические потери в системе, в том числе механические потери в двигателе.
, включающий все механические потери в системе, в том числе механические потери в двигателе.
Момент сопротивления механизма, возникающий на валу рабочей машины, состоит из двух слагаемых, соответствующих полезной работе и работе трения. Полезная работа, совершаемая производственным механизмом, связана с выполнением соответствующей технологической операции. Работа трения, совершаемая в производственном механизме, учитывается обычно КПД механических связей. Момент трения всегда направлен против движущего момента привода.
2.2. Приведение моментов и сил сопротивления, инерционных масс и моментов инерции
2.2.1. Активные и реактивные моменты сопротивления.
В общем случае статический момент
 ,
,
где  – суммарные потери в приводе;
– суммарные потери в приводе;  - суммарный статический момент.
- суммарный статический момент.
Обычно первая составляющая имеет сравнительно малую величину. Поэтому рассмотрим вторую составляющую статического момента, оказывающего наибольшее влияние на привод.
Для электропривода имеет значение, как зависит статический момент нагрузки от скорости. Такую зависимость описывает механическая характеристика механизма, то есть зависимость статического момента нагрузки от скорости  или
или  .
.
По характеру взаимодействия с электроприводом все силы и моменты делятся на две большие группы: активные и реактивные.
Активными силами и моментами называются силы и моменты, создаваемые внешними по отношению к двигателю источниками механической энергии и не зависящие от работы двигателя. Например, силы тяжести, ветровые нагрузки. Активный статический момент не меняет своего знака при изменении направления вращения.
|
|
|
| Рис. 2.2. Механическая характеристика активного момента | Рис. 2.3. Механическая характеристика реактивного момента |
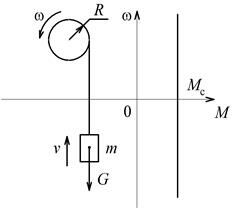
На рис.2.2. приведенный момент силы тяжести груза G:
 ,
,
где g – ускорение свободного падения; m – масса груза.
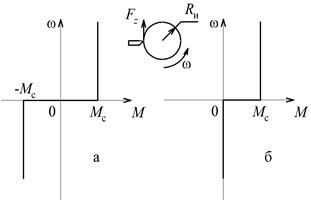
Реактивными силами и моментами называются силы и моменты, возникающие как реакция на момент, создаваемый двигателем и направлены против направления вращения двигателя. Все реактивные силы и моменты зависят от скорости. По характеру этой зависимости ( ) различают нагрузки типа сухого трения, типа вязкого трения и вентиляторного типа.
) различают нагрузки типа сухого трения, типа вязкого трения и вентиляторного типа.
Силы и моменты сухого трения неизменны по модулю, но скачком изменяют направление в зависимости от знака скорости
 .
.
Характеристика момента сухого трения показана на рис. 2.3, a.
Реактивные нагрузки, возникающие при различных технологических процессах обработки, могут иметь одно направление, скачком изменяя своё значение до нуля при изменении знака скорости. Примером может служить зависимость (рис. 2.3, б) момента резания от скорости при обработке изделия резцом. Значение статического момента при этом пропорционально усилию резания  :
:
 ,
,
где  – радиус изделия.
– радиус изделия.
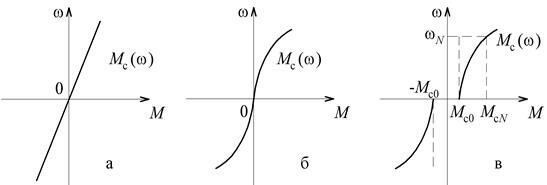
Силы и моменты вязкого трения линейно зависят от скорости (рис. 2.4, а):
 ,
,
где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
Обычно момент вязкого трения составляет 8-10% от момента сухого трения.
Третий тип часть встречающихся нагрузок – вентиляторная нагрузка. Такая нагрузка зависит от скорости в более высокой степени (рис. 2.4, б)
 ,
,  .
.
При  нагрузку называют чисто вентиляторной. Такой зависимостью обладают центробежные вентиляторы. Для ряда механизмов показатель степени
нагрузку называют чисто вентиляторной. Такой зависимостью обладают центробежные вентиляторы. Для ряда механизмов показатель степени  . Такую характеристику имеют центробежные насосы, работающие на противодавление.
. Такую характеристику имеют центробежные насосы, работающие на противодавление.
В реальности у механизма есть некоторый начальный момент трогания  , составляющий 20-40% от номинального
, составляющий 20-40% от номинального  (рис. 2.4, в).
(рис. 2.4, в).
Существуют механизмы циклического действия, у которых момент нагрузки зависит от угла поворота:
 .
.
Рассмотренные типовые нагрузки обычно содержатся в качестве составляющих в нагрузках реальных электроприводов.
|
|
| Рис. 2.4. Моменты нагрузки типа вязкого трения (а), вентиляторного (б) и реального вентиляторного типов (в) |
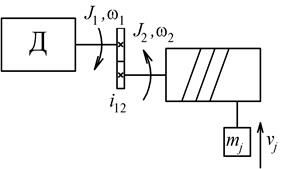
2.2.2. Приведение момента инерции для вращательного и поступательного движения рабочего органа
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а так же элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Поэтому при приведении моментов инерции элемента системы, движущегося вращательно со скоростью  или массы, поступательно движущейся со скоростью
или массы, поступательно движущейся со скоростью  к расчетной скорости
к расчетной скорости  должны выполняться условия
должны выполняться условия


Отсюда можно получить формулы приведения моментов инерции:
 ,
,
где  – передаточное число от вала приведения до i-го вала;
– передаточное число от вала приведения до i-го вала;  – радиус приведения к валу со скоростью .
– радиус приведения к валу со скоростью .
|
|
|
| а | б |
| Рис. 2.5. Расчетная (а) и эквивалентная расчетная (б) схемы механической части (вращательное движение рабочего органа) | |
|
|
|
| а | б |
| Рис. 2.6. Расчетная (а) и эквивалентная расчетная (б) схемы механической части (поступательное движение рабочего органа) |
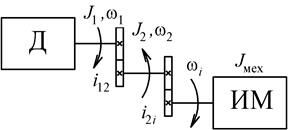
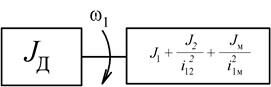
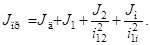
Приведенный суммарный момент инерции для механизма на рис 2.5, а вычисляется с учетом формул приведения для моментов инерции следующим образом:
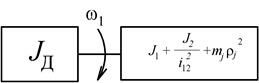
В случае поступательного движения рабочего органа исполнительного механизма:
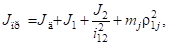
где  - радиус приведения.
- радиус приведения.
2.2.3. Приведение моментов сопротивления
Приведение моментов сопротивления от одной оси вращения к другой может быть произведено на основании энергетического баланса системы. Потери мощности, возникающие в промежуточных передачах, учитываются введением в расчеты соответствующего КПД -  .
.
Без учета КПД передачи приведение моментов сопротивления можно выполнить приравниванием мощностей на двигателе и рабочем органе ИМ:
 и
и  ,
,
где  – момент сопротивления производственного механизма.
– момент сопротивления производственного механизма.
Откуда статический момент на валу двигателя
 ,
,  .
.
Приведение сил сопротивления производится аналогично приведению моментов. Без учета потерь в передаче приведенный к валу двигателя статический момент
 ,
,  .
.
2.2.4. Об учете КПД передаточного механизма
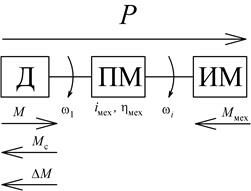
Рассмотрим упрощенную схему механической части электропривода. Передаточный механизм (ПМ) обладает двумя характеристиками передаточное число  и КПД
и КПД  механизма. В КПД механизма входят все КПД элементов
механизма. В КПД механизма входят все КПД элементов
 .
.
Двигатель создает механическую мощность, направленную от сети к исполнительному механизму. Уравнение баланса мощностей
 , (1.1)
, (1.1)
где  – момент потерь, складывающийся из момента трения в двигателе и передачах.
– момент потерь, складывающийся из момента трения в двигателе и передачах.
Величина момента потерь редко превосходит 3-5 % от номинального момента и им часто пренебрегают, считая  .
.
Разделив обе части уравнения (1.1) на , получим
 ,
,
где  - общее передаточное число передаточного механизма.
- общее передаточное число передаточного механизма.
Таким образом, для двигательного режима справедлива следующая формула для определения приведенного статического момента:
 .
.
Рис. 2.7, а иллюстрирует направления потока энергии и моментов.
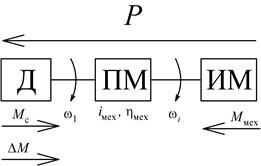
В генераторном режиме источником момента является сам исполнительный механизм. Статическим моментом в данном случае является момент двигателя в тормозном режиме. Уравнение баланса энергий для генераторного режима
 .
.
Выполнив процедуру деления на скорость двигателя, получаем
 .
.
При поступательном движении статический момент в двигательном режиме
 ,
,
в генераторном режиме
 .
.
|
|
|
| а | б |
| Рис. 2.7. Направления энергии и моментов для двигательного (а) и генераторного (б) режимов работы привода |
2.3. Механические характеристики производственных механизмов и электрических двигателей. Понятие жесткости механической характеристики
Для правильного и экономичного использования электродвигателей необходимо выявить механических характеристик двигателя характеристике производственного механизма.
Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма  называют механической характеристикой производственного механизма.
называют механической характеристикой производственного механизма.
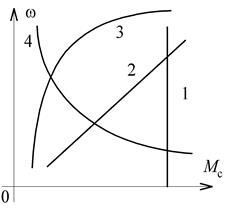
Различные производственные механизмы обладают различными механическими характеристиками. Однако можно выделить отдельные категории механизмов на основании вида механической характеристики. Общий вид характеристики
 ,
,
где  – момент сопротивления производственного механизма при скорости
– момент сопротивления производственного механизма при скорости  ;
;  – момент сопротивления трения в движущихся частях механизма;
– момент сопротивления трения в движущихся частях механизма;  – момент сопротивления при номинальной скорости
– момент сопротивления при номинальной скорости  ; x – показатель скорости.
; x – показатель скорости.
1. Не зависящая от скорости механическая характеристика (прямая 1 на рис. 2.8, а). показатель степени  и момент не зависит от скорости. Такой характеристикой обладают подъемные краны, лебедки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи. Сюда же можно отнести механизмы, у которых основным моментом сопротивления является момент трения.
и момент не зависит от скорости. Такой характеристикой обладают подъемные краны, лебедки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи. Сюда же можно отнести механизмы, у которых основным моментом сопротивления является момент трения.
2. Линейно-возрастающая механическая характеристика (прямая 2 на рис. 2.8, а) В этом случае  и момент сопротивления линейно зависит от скорости . Главный привод некоторых станков.
и момент сопротивления линейно зависит от скорости . Главный привод некоторых станков.
3. Параболическая механическая характеристика (кривая 3 на рис. 2.8, а). Этой характеристике соответствует  . Механизмы, обладающие такой зависимостью, называют механизмы с чисто-вентиляторной нагрузкой. Сюда относят центробежные насосы, гребные винты.
. Механизмы, обладающие такой зависимостью, называют механизмы с чисто-вентиляторной нагрузкой. Сюда относят центробежные насосы, гребные винты.
4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.8, а). При этом  и момент сопротивления
и момент сопротивления  изменяется обратно-пропорционально скорости, а мощность потребляемая механизмом остаётся постоянной. В эту группу относят некоторые токарные, расточные, фрезерные станки, моталки в металлургическом производстве.
изменяется обратно-пропорционально скорости, а мощность потребляемая механизмом остаётся постоянной. В эту группу относят некоторые токарные, расточные, фрезерные станки, моталки в металлургическом производстве.
Существуют механизмы и с промежуточными характеристиками.
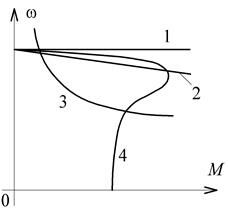
Механической характеристикой электродвигателя называют зависимость его угловой скорости от вращающего момента  . Наиболее распространённые виды характеристик двигателей представлены на рис. 2.8, б.
. Наиболее распространённые виды характеристик двигателей представлены на рис. 2.8, б.
|
|
|
| а | б |
| Рис. 2.8. Механические характеристики производственных механизмов (а) и электродвигателей (б) |
Механическая характеристика характеризуется жесткостью. Под жесткостью понимают отношение приращения момента к приращению скорости, которое было вызвано приращением момента. Жесткость механической характеристики показывает, как (насколько) изменяется скорость двигателя (механизма) при изменении момента на валу двигателя (статического момента). В общем случае жесткость  вычисляется по формуле
вычисляется по формуле
 .
.
Для линейных механических характеристик производные могут быть заменены приращениями
 .
.
Механические характеристики двигателей в зависимости от жесткости могут быть разделены на следующие категории:
1. Абсолютно жесткая механическая характеристика ( ) – скорость при изменении момента остаётся неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 2.8, б).
) – скорость при изменении момента остаётся неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 2.8, б).
2. Жесткая механическая характеристика. Скорость двигателя уменьшается не значительно при изменении момента. Такой характеристикой обладают двигатели постоянного тока с независимым возбуждением (ДПТ с НВ). И асинхронные двигатели (АД) в пределах рабочей характеристики (прямая 2 и кривая 3 на рис. 2.8, б).
3. Мягкая механическая характеристика – при изменении момента значительно меняется скорость (кривая 3 на рис.2.8, б). Такой характеристикой обладают ДПТ с последовательным возбуждением, особенно в зоне малых моментов.
4. Абсолютно мягкая механическая характеристика ( ) – такая характеристика, при которой момент двигателя при изменении скорости остаётся неизменным. Такими характеристиками обладают замкнутые САР тока при работе в режиме ограничения тока якоря.
) – такая характеристика, при которой момент двигателя при изменении скорости остаётся неизменным. Такими характеристиками обладают замкнутые САР тока при работе в режиме ограничения тока якоря.
Асинхронный двигатель обладает механической характеристикой с переменной жесткостью.
2.4. Уравнение движения электропривода
Когда момент производственного механизма и момент двигателя совпадают, а двигатель работает на устойчивом участке механической характеристики с постоянной скоростью, имеет место установившийся режим работы электропривода. Однако во время работы параметры механизма могут меняться (момент инерции, момент сопротивления, изменение управляющих либо возмущающих воздействий). В этих случаях возникает режим перехода от одного установившегося состояния в другое. Такой режим называют переходным.
Уравнение равновесия моментов для вращательного движения
 , (1.2)
, (1.2)
где  – суммарный момент инерции,
– суммарный момент инерции,  - ускорение привода.
- ускорение привода.
Уравнение (1.2) часто называют основным уравнением движения привода. Уравнение показывает, что развиваемый двигателем вращающий момент  уравновешивается моментом сопротивления
уравновешивается моментом сопротивления  на его валу и динамическим моментом
на его валу и динамическим моментом  .
.
Разницу между моментом двигателя и статическим моментом называют динамическим моментом
 .
.
Из анализа основного уравнения движения можно сделать следующие выводы:
1) при  имеет место ускорение привода –
имеет место ускорение привода –  ;
;
2) при  имеет место замедление привода –
имеет место замедление привода –  ;
;
3) при равенстве моментов двигателя и сопротивления  привод работает в установившемся режиме работы
привод работает в установившемся режиме работы  .
.
Динамический момент появляется только во время переходных режимов, когда изменяется скорость привода. При ускорении этот момент направлен против движения, а при торможении поддерживает движение.
С энергетической точки зрения режимы работы электропривода разделяются на двигательные и тормозные, отличающиеся направлением потока энергии через механические передачи привода. Двигательный режим обычно соответствует прямому направлению, тормозной – обратному. Характерным признаком двигательного режима является совпадение знаков скорости и момента двигателя; в тормозном режиме их знаки не совпадают.
В установившемся режиме работы имеет место статическая устойчивость привода, то есть такое состояние установившегося режима работы привода, при котором случайно возникающие отклонения скорости от установившегося значения привод возвратится в точку установившегося режима. При неустойчивом движении любое отклонение от установившееся скорости приведет к изменению состояния привода – возникнет переходный режим.
Привод статически устойчив, если в точке установившегося режима выполняется условие

или
 .
.
Итак, если привод статически устойчив, то при положительном приращении угловой скорости момент двигателя окажется меньше статического момента и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении скорости момент двигателя будет больше момента сопротивления, и привод разгонится до прежнего значения скорости.
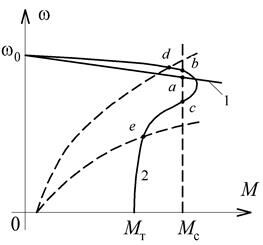
При постоянном моменте нагрузки статическая устойчивость будет определяться только жесткостью механической характеристики двигателя, так как  . Если она отрицательна, то работа в установившемся режиме устойчива (точка а на рис. 2.9)
. Если она отрицательна, то работа в установившемся режиме устойчива (точка а на рис. 2.9)  .
.
Если использовать асинхронный двигатель с короткозамкнутым ротором и нагрузить его постоянным моментом, то в точке b будет иметь место установившийся режим работы, так как  , а в точке c режим не устойчивый, так как жесткость механической характеристики двигателя положительна. При работе АД с КЗР на механизм с вентиляторной характеристикой устойчивый режим будет наблюдаться в точках d и e.
, а в точке c режим не устойчивый, так как жесткость механической характеристики двигателя положительна. При работе АД с КЗР на механизм с вентиляторной характеристикой устойчивый режим будет наблюдаться в точках d и e.
|
|
| 2.9. К определению статической устойчивости привода |
2.5. Время ускорения и замедления привода
Время переходных режимов привода: пуска, торможения, перехода от одной скорости к другой влияет на производительность механизма. Определение времени переходных процессов основано на интегрировании уравнения движения привода. Разделяя переменные, получим:
 .
.
Время переходного режима при изменении скорости от до 
 .
.
Если принять, что  , результатом решения интеграла будет
, результатом решения интеграла будет
 .
.
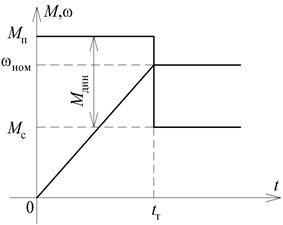
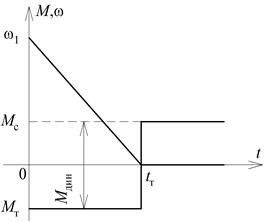
Рассчитаем время пуска привода от состояния покоя ( ) до номинальной скорости с пусковым моментом
) до номинальной скорости с пусковым моментом  при наличии на валу двигателя момента сопротивления (см. рис. 2.10)
при наличии на валу двигателя момента сопротивления (см. рис. 2.10)
 .
.
Если требуется точно рассчитать время переходного процесса для привода с асинхронным двигателем ( ), то следует использовать формулу в интегралах.
), то следует использовать формулу в интегралах.
Теоретически, полное время переходного процесса равно бесконечности. Поэтому в практических расчетах обычно считают, что процесс разбега заканчивается при скорости, равной не , а  , тогда время процесса получается конечное.
, тогда время процесса получается конечное.
В тех случаях, когда динамический момент имеет отрицательное значение, привод замедляется (рис. 2.11). Для этого случая уравнение движения будет иметь вид:
 .
.
Привод будет замедляться и в том случае, когда двигатель будет развивать момент, меньший статического, по абсолютному значению.
|
|
|
| Рис. 2.10. Пусковой график привода | Рис. 2.11. Тормозной график привода |
Время торможения привода
 .
.
Для частного случая, при ,
 .
.
Можно также посчитать оптимальное значение передаточного числа ПМ  при заданных значениях моментов инерции двигателя и механизма
при заданных значениях моментов инерции двигателя и механизма  и
и  , а также момента сопротивления .
, а также момента сопротивления .
Уравнение движения привода относительно рабочего вала механизма
 ,
,
где  – коэффициент, учитывающий момент инерции передач.
– коэффициент, учитывающий момент инерции передач.
Очевидно, что минимальное время будет при максимальном ускорении привода
 .
.
Для нахождения оптимального передаточного числа найдем точку максимума функции  .
.
Если Вам понравилась эта лекция, то понравится и эта - Особенности проповеди спасителя.
 ,
,  .
.
Решая уравнение
 ,
,
получаем передаточное число ПМ
 .
.
Второе решение уравнения (со знаком минус перед вторым слагаемым) дает при всех соотношениях i отрицательные значения.




















