Книга: методичка № 1892 для выполнения лабораторной работы №3 по схвату робота
Описание
Характеристики книги
Список файлов
- MU1892-LabRab-1
- Scan10001.JPG 164,94 Kb
- Scan10002.JPG 356,63 Kb
- Scan10003.JPG 335,65 Kb
- Scan10004.JPG 371,89 Kb
- Scan10005.JPG 397,99 Kb
- Scan10006.JPG 301,83 Kb
- Scan10007.JPG 108 Kb
Распознанный текст из изображения:
ЦьЕДЕРАЛЬ Е ТВ П БР ВЛНИЗО
МОСКОВСКИЙ ГОСУДАРСТВ СКИЙ
УНИВЕРСИТЕТ «МАМИ»
Кыуедрт: „АВТОМАТИЗИРОВАННЫЕ СТАНОЧНЫЕ СИСТЕМЫ И
ИНСТРУМЕНТ '*
доцент, к.т.н. Бууотов Е.А.
доцент, кл.н. Сидоров СГ,
ОДОБРЕНО:
на ьютодической комиссии
факультета МТ
„Траншортно-накопительные системы и промышленные роботы" дея студентов специальностей БАнгомаыцация технологических процессов и проюаедст" 220301.б5 и „Меюллообрабатываюьпие станки и комплексы" 151002.65 .
т
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению компяекса лабораториьгя работ по дисюпюине
Распознанный текст из изображения:
«Изучспие копструклии, настройка программы и наладка проьгышлснного
робота МП-9Ся.
конструкции, наладка работы элементов, настройка программы и
проверка работы робота МП-9С.
2П.Об ие лонялгия и гне мивология.
1. Промышленнымн роботами называются упнверсальныс, автонамныс и
автоматичсскис устровства с памятью и программным управлением,
прсдвазначснныс для восправзвопсния двигатсльных и нскозорых
умственных фунюгий чслаиека при выпалнснин основных и
вспомогашльных опсрлций обработки детачей и сборки изделий.
Предшественниками роботов являются мсхавическая рука и
тслсопсрагор.
2. Механическая рука — это мсханическпе, автоматичсскос устройство
Лля выпалнсния аспочоппсльных и подьсмно транспортных опсраций.
3. Тслсопсратор — ио устройсшза с дистанционным управлением,
прсззназначснпос дла аьпюлнсния основных и аспомагптольных
праизводствснных пропоссоя.
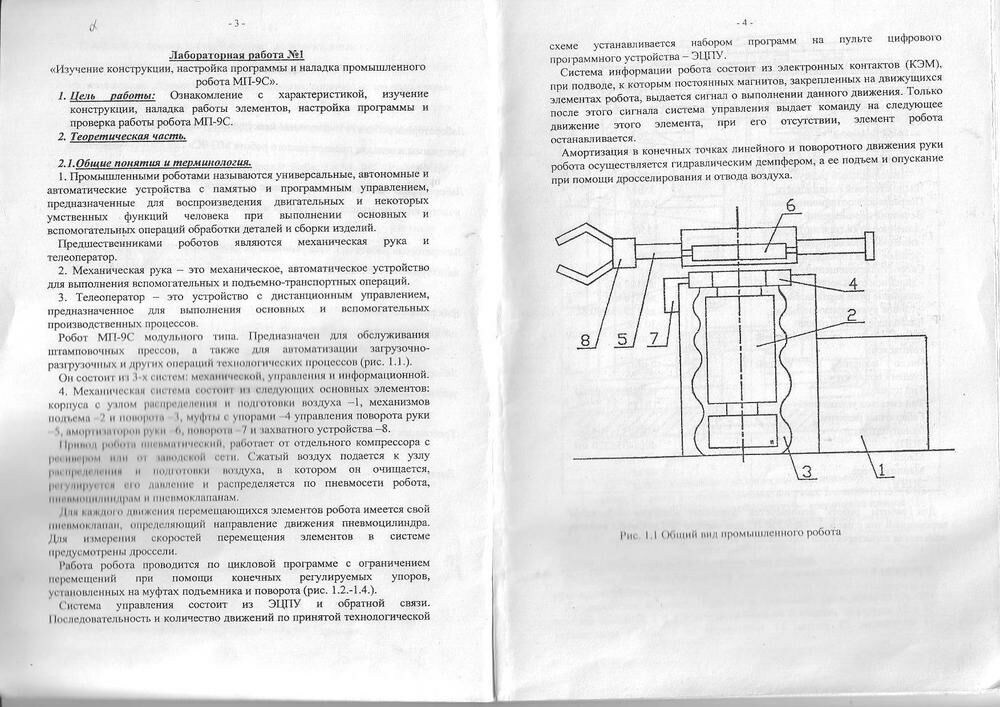
Робот МП 9С ьгодузп ишо иеа Прслнялшаж зшя обслузкзшания
шггзмпгзиочгззш прсггге, х такл с ше ввшмшишщнн загрузочнорл н1зузошшх и лрг ыш ~ес!зчгьгй шю! ш ли юслн. пр зцассов (рис. 1.1.!.
Оп сооплп нз 1 х гп -шм'ьгахд14пшяыий улр«вм«и» и информационной.
1, Мшнппшгггкгп гшггсьнг «гзггзт1ит гзз ымлую1щш ос пошшх элсментв:
кг рпуса с узж.м ряш! шиягизш и гюдг шайи лмлуха -1, механизмов
~ оютма .',. ншшнрп1а-1, муфг1ы гг ут! 1шми 4 упраишапи» поворота руки
1 1гьтйр! гуггззтзрг гг 4здй!! ф!ьч1гзьгзрг1111 ы1 и ш шамгого устройства -3.
Пггзгл',бфяФгт2!4'.'1!э!с!1мйКи гмрю1й, ргзбзо гас г от о ггзшп нога кампрссгора с
рвиггбяй!з11Ы ',йчй: гъ" зззгз1гзагчгузай счзн..Схгагый возлух подастся к узлу
1зый1рйзйчйвбуг11а '- 19 -*.'п1яцфтовкн жпдухв, в котором он очищается,
'4~лрйзбз2!зу1ьй1йя';ззбгзз тйз1згггчзггв и рмпрелеюются по пнсвмоссги робота,
уьт1нпюйз11!1гяи!гз111я!ьз л шзялмокваилйам
,,гчфшйнлясбз!611 1щгбюки»' рчрамощаюшихся элементов робота имеется свай ",' *, 1гз1ттйьтгг!111ггзлгг, шфсдшгкгеций ищгравлсвис лнюксння пневмоцилинлра.
92з1д изба!мгшл . скоросшй перемещения эламснтов в системе
зтрч!гусмозрсггз,г лросссви.
!эббота 1зобота проводится по цикловой программс с ограничением
гзкрсмгчтгцгзий при помощи «онсчвых рсгулируемых упорна,
улыикзвлвнных гга муфтах полном ника и повораш (рис. 1.2 -14.!.
Сисшма управлсния состоит из ЭППУ и обратной связи
! КЮюдгтнатшгьгггзсть н количсство лви:копий па принятой тсхнояогичаской
схеме тстанааз иласгся набором программ на пульта цифрового
про~раьзмнгзго устройшва — ЭЦПУ.
Систома информации робота состои~ из эчектронных конгактов 1 '
'КЭМ!
при подводе, к которым постоянных магнитов. закрсплснных на движузлихся
ия. Только
злсмантах робота, выдастся снцггш о выполнснии данного движсн
после этого сипгала система управления выдает команду на слсдуюшсс
движсниа этого элемента, при его отсутствии, элемент' робота
осшнавливастся
Амортизация в коночных точках линсйного и поворотгюго движения руки
робота осуществлястся гидравлическим демпфером, а ос гзодшм и опусканис
при помощи дроссслировадня и отвода воздуха.
1сю .1,! Обилий ыш пр шышасшлпп рг бота
Распознанный текст из изображения:
раб ии М11-ОС сиейугомая
1
!20'С 30 мм.
50 мьг.
200 мм 3 пгг. з-0,05
-150 мм
30 мм
120"
до 100 м!с до 310 мгс ло 120 град!О,бс 30 ыг
6 пгн
пи«имка и чески««
1!МУ
Обм232х305 мм
!0«м435х221! мм
'О ю
2.2 Гелническаяиясио хчиояхо имн потника.
Техническая паспортнаяхарабге истика
Число рук
Грузоподъемность
Рабочая зона:
-угол поворота
-всзгичина подъема
-минимальный радиус
-максимал«.ный радиус
Числе степеней нодвимяостн.
По«1«с««злость позипнонн!зояаиня
Величина перемещений
-линейное руки«оратаю.ачьиае
-линейное руки еергикальвос
-угловое руки горизонтальное
Скорости перемещений.
- линейно« руки горизонтальное
-линейное рухи вертиксльнос
угяоеае руки горизоггта«г нос
'Ьсло переколов а Инклс
Число 'мхно югнческнх
комплексов
Число потииий по хамной,
с«елани пояяимпосз'и
Тип привода
Тип системы управления
Габарипгые рагьгеры:
манипулятора
ЭППУ
Масса:
Манипулятора
ВЦПУ
для работы робота исполмуется легмонп«вемуызм 3-5 г««5«м' переменный так с напряжеяисм 220 В, при ге«се по 50 1 и. Смысл кмкдого паказамля характеристики определяется ыо панк«снованием,
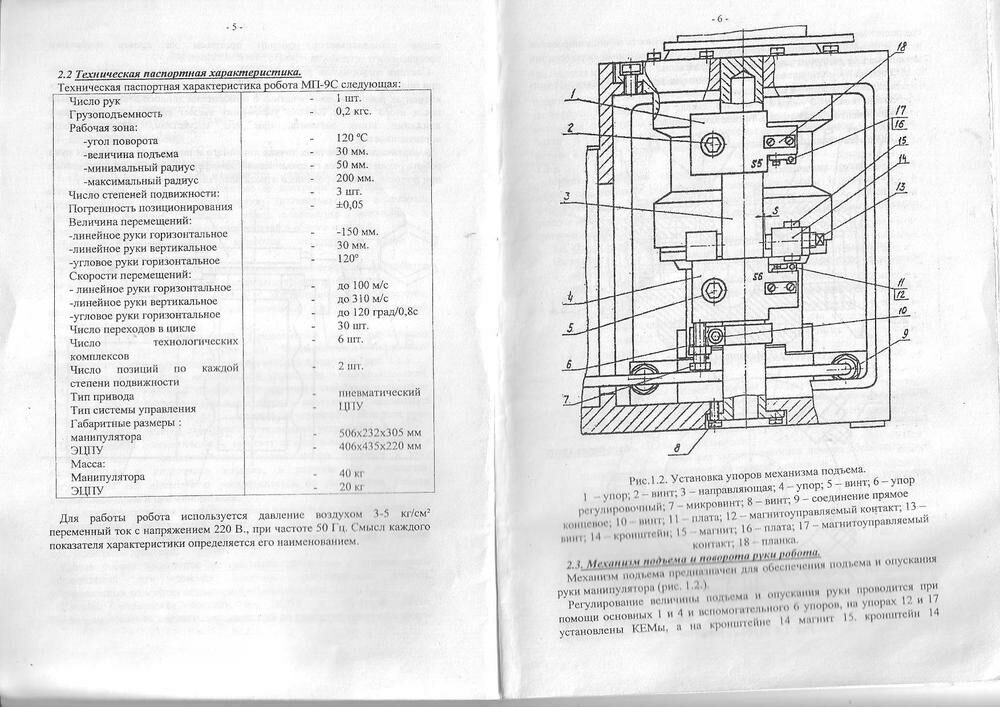
Рис 1 2. Ус ~ аиоы«а упоров механизма подъема
упо!Ч 2 аиит«3 -папрагзггя~«зггтая! 4- упор, 5 — вим; 6- упор
ры улгг!зогг« 'ииай; 2 - микроюнт; 8 - винт, о - соединение поямое
г««ггг!«««гат«110,. «г!гг!«; ! ! .лыпв: 12- мо~пигоуправяаемыйконтюы; 13
г«тд!т! 14 ~«Рор«ггтгг!3!к,15 мы им: 16 3«лага; 1'1 - ьгапгизоуираилг~емга13
к«чгигхт! 1х г!амн«а
2.1!мдуй!Вйй!«ййййдуйбь444,В йй!43«004«143! Огг!441!«ТВ«!01!й
Мех«и!и«м л«ыы!ма г«!едги!Отггчргг ддк з«!1«3«мгсым гиз«гг«ма коггуоюивя
1'сгулиронинис ггмггггйпгз п«14«я4мг!'г! Опу«:кама руьд гг!х води!ся ирн
ламоию осно»ных 1 и ! и гг«п гнем~сии!гг!«г 6 утг«1!мгг, !ы у!арах И. н 3!
установлены КРМм. а ии кргрнпсМю !4 ьгг«!и«за !5 кргинптй!О! Н
Распознанный текст из изображения:
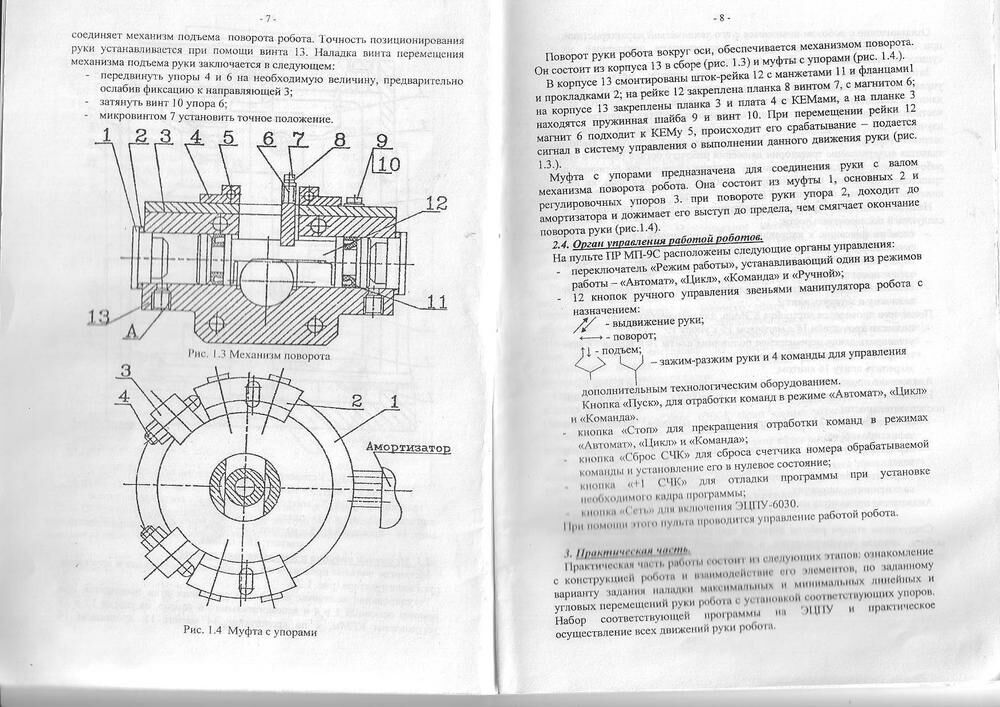
гоединяс~ мсхаиию по!лема и
л 'ма поворота работа. 1очность гюзипиояироааиия р>кн усганаюивасз ся прн помощи вины !3 Нюыдю вюпа ггсрелгслг ния механизма польсма руки закзпачается л слелующем. лерелвии>зг, упоры 4 и 6 ва необходимую величину, преззварнгсльно гхлабия фиксацию к напраюзяющей 3; затянуть «и нг 10 упора 6, ми крови н юм 7 ум«навить ~очное положение 1'нс. ! Д Чехлпязм поворота
атой
Риг 1.4 Муфта с упорами
,-!и;ют ггз корпуса 13 в сборе " >з °, жетами П н флвипами
Вкор„у„13смониР ' В . 7,сма 'пломб'
дпок-рейка - с мысле '
и прокладками 2; на рейке р
ке 12 заь сипела планка винтпм
с КВМами, а на планке 3
3 еплены планка 3 и плата 4 с ами, а
На корпусе 1 закр
!О П и перемещении рейки 12
находатся пружи
пиная шайба 9 н винт ри
5, п исходит ега срабатыдание — подастся
мзГнгп пад«одвт ям>му 6, п>юнсхаднт его !з
сипгал в систем> управления о выполнении данного движения
1.3.).
я соединения руки с валом
М фта с упорами предназначена для с
ных 2 и
,регулиравочнь р
ных упо ов 3, при повороте руки упо а
ре , ем смягчает окончание
амортизатора и дожимаст его в ту
ыс п до предела, чем
поворота руки !Рис 1.4).
24.бл ган л а«лмгия абаюой абогиа«.
На пульте ПР МП-9С расположены следующие органы управления:
н" о ии из ежимов
переклго ~атель гг о
Ражим рабатыэ. уатанавливающнй од р
ра оты — «в
б — А томат», «1 1икя», «Команда» и «Ручной»;
то а обста с
!2 кнопок рупюга у правления звеньями манипулят р р
назначением:
- выдвижение руки,
- поворот;
(
!1 - подъем;
ю ы ля управления
— зажим-разжим руки и 4 «омавды дл р
час«им абааудованисм
К~гапка «Пуск», для отработки колгапл в режиме «Аз>амат», « . иклэ
л «Команла».
'р б и команд в режимах
кнопка «Сюп» югя прекрагп сипя о.'ра апти ком
», «Цикл» и «Команла»,
к!к !ща г .' >рос
Сб СЧКлл !ащ сброса счепгака номер~
ы П с!зююлснис ага в н>левое состояние,
г:и'якв С,'ЧК» Мя отладки программы
и'лбы лагг ~ г мщря щкгр»ммм,
«1." л» лдв !я.моления .!>1,й !У.6030
111>!!1>1Г!ЗГЯГИУГ Яа,!!УС!аз г Э
я с*1'илло одюгяунржщнис раба~ ' рг
1 Вйг!ФЗОЖФФФ41ОР)фйь'. ':: . „„:,м,аы чзмни; огиакоммиис
,',чс,„",;,;,';144)>ь.'!ЫЩг)фг Яагс!и!»э г>г 1г!" У" ",, ' мюомУ
а г!!3»ги!гс гр! >ггсмггг!! гя. гю гэд
с !гггнгзруы!иг>й )юббзи в !гггггимсггйг!!лг . г
и >Оп. !г' йилвмщ!щ!»ж дино и,,
щрианту ииыявл пю!нбщи мысд!ый щ
г ! ав юбгггс с угггггио!г!аб! «глггг мгтощу1щйих у!
упювыхпсрсммпеимйруав раб>а сугг' а",*! 1 "' * нх
Набор саозвегсгвующсй нрмримлл! ня !! 1 и
осуществление всех движений ругал !>аб!аз!
Распознанный текст из изображения:
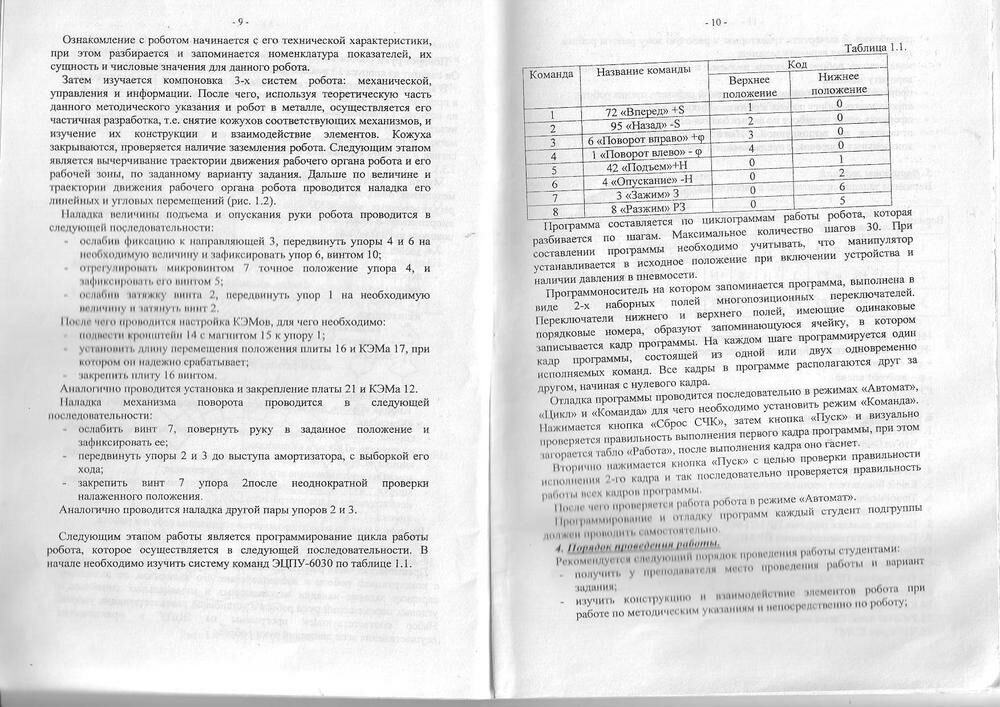
Озн акомление с робеем начинае~ся с ° го технической характеристики,
при этом разбирается и запоминается номенклатура покюагелеи, их
сущность и числовые значения дл» данного робота.
Затем изучается компоновка 3-х систем рабата; механической.
унраален»я и информации После чего, использу» теоретическую часть
данного методического указали» в работ в металле, осуществляется его
мои>чная разработка, т е. снятие кажуков соотвепжвующих механизмов, и
звучание их конструкции и взаимодействие элементов. Кожуха
закрывшогся, проверяется наличие заземление робота. Следующим этапом
являотся аычер навине >раектории движения рабочею органа робота и его
р>йогой зонь>, по залацвому варианту задания. Датьще по величине и
>реактор«и двнженая рабпчего органа робота проводится нэлццка его
л н<«14н»>х и уюювых перемсгпений <рис. 1.2!.
<Ьщюыя яелнгщны подаем > и опускания руки робота проводится в
>ящ1поп<гй пыл«доя>ю'>эпос>н;
ося бня фикс»пи>о ь напраюыкпцей 3, перелвннуть упоры 4 и 6 на
щ об ищпмую н>лн оп>у и афцм нрооап, упор 6, винтом 10,
Г ця»чн><>нам м>м<юяп>ппм 7 >о >нос положение упора 4, и
>яфпжцротгп ю'> а>юпн<,';
о>зоб»а цыяц «у эщ>1« .', мрглннну>ь упор 1 на необходимую
»Гкп >аю а м я>ю>ь > киту
1!пюю >«нй цр>нющищ> нм"<рМмв КЗ>МГ и, д>ы чего нообходимо;
ЩЫВМН«кр>мщюйн 14 Г Маыщ»м !5 купы у1;
ун>тн><>н>г>>1 <рощу л<ремсюслня наложения или <ы ! 6 и КЭМа 17, при
к ифом пп нажжнн срабп ывасц
звкрепюь пщцу !6 в«игом
Лцгщомчно проводи>ся успщовка и закрепление плагы 2 ! и КЭМа 12.
1йцмдка механизма поворота проводится в следу>ащей
>олпе<моэт>п ппгжн:
>жлэбюь винт 7, повернуть руку в заданное положение и
<афяксирояа гь ее;
передвинуть упоры 2 и 3 ло выступа амортизатора, с выборкой его
хода;
закрепить винт 7 упора 2после неоднократнпй проверки
нгщаженлого положения
Лполопгчво проводная яаяадка другой пары упоров 2 и 3.
Следующим этапом работы является программирование цикла работы
робо>а, когорос осуществляется э следующей последавательвости. В
начале необходима изучить систему команд ЭЦПУ-6030 по табвине ! .1.
-10-
Таблица ! 1
Команда ~ Название команлы >
> Кол
Верхнее 1 Нижнее
1 г>аложение ~ поюжение
1 1 72 «Впередэ 4-5 . 1
95 «Навал» -3
3 6 >>Поворот вправо>> 1 18
— — — Г' 0
0
4 1 1«Поворотец«воя-ф Г
42 «Подъсьо». Н
6 > 4 «Оп~сканиев Цф
7 э Г>Зажиьо> 3
) 8 ~ 8 >.Разжим» РЗ 0
1 ' „5
кото ая
П мма составляется па пиклограммаь> работы робота, р
ро>ра
О. Пи
ргжбивается па >на>
-ам. Максимальное «аличество шагав 3 . ри
енин о> аммы необходимо учитывать, что манипулятор
усгачавливается в исходное положение прн включении ус,
цю>ичии давления в пневмосе >и
Н аммоноситель на котором запомвнается про р
г амма, выполнена в
рогр
виде 2-х яа орных пал
б ей многопазиционнык переключателей
Переключатели ни>киста н верхнею позе, щ
», имею не одинаковые
Поряпкавые номера. образуют >апомннающую ся ячеику. н к>паром
'запись>застоя >садр программы. На каждом шаге р .р ° ру
и о> ам г етая адин
гщдр программы, состоящеи из оцной >п д п
и. г вух аднав сменно
исполняемых комав
ком вд Все кадры в программе располагмотся дртг за
другом, начиная с нулевого кадра
<ЭГладгю программы проводится последовательно р
в сжимал >ГЛвтоматэ
«Пикя» и «Команды> для чею необходимо ус>аповнть режим «Команды>
16нкимаеюя кнопка «Сброс С 1К», затеи кнопка «у ' у
«И скэ и виз азьна
проагряюсл правильностьвыполнения первого кадр р р, р
ап о> аммы,п и зп>м
>' м>,ю> я <айза«Рябо>а, после выполиениякадраоно Гаснет
1 ', Впрв>нн н> »>>имаме>ск «попка «Пуск» с целью проверки р
ове ки п ави юности
пгющ»мял >о >юл<ы и цж >а слег а
г .: ',».,: . донне>1ыю проверяется правильносп,
<ч>щ >и >юсх кщ< оя>ф Г<жчмы
Ппюф цщ йроатряю ° ! »ьча рощ>нара киме «л>помгпэ
75><>Г<рцйи<<ррю>ци! л пю»дкч щчцрачм >Гажцю> студен> подгруппы
36«юи>>1 црм>%в<< в ялмо> тщ< >эмн>,
4 Й<йфйьфФМФйфДйДЗ«10<0>З<Е
1 е>а>мт«1>й516<>зятя««т«и><д<'1> й ц><1ююз н<киц>ь<ч>ин р Йцп > с гуж цщьц>,
нину>из>1 'у нйд<п><6>1>з<608 ммл ..при>мя>юз раца>ы н ц»1»юю
и>ущн, кщм><фюлщ> н»>аяюжай»впа *цмыапГ0» <ю5>ь
рабе>е по нет адп кщ >ю у>ю цщ«я н иащирюа > эечю»ю рой 117; '
Распознанный текст из изображения:
12
- 11
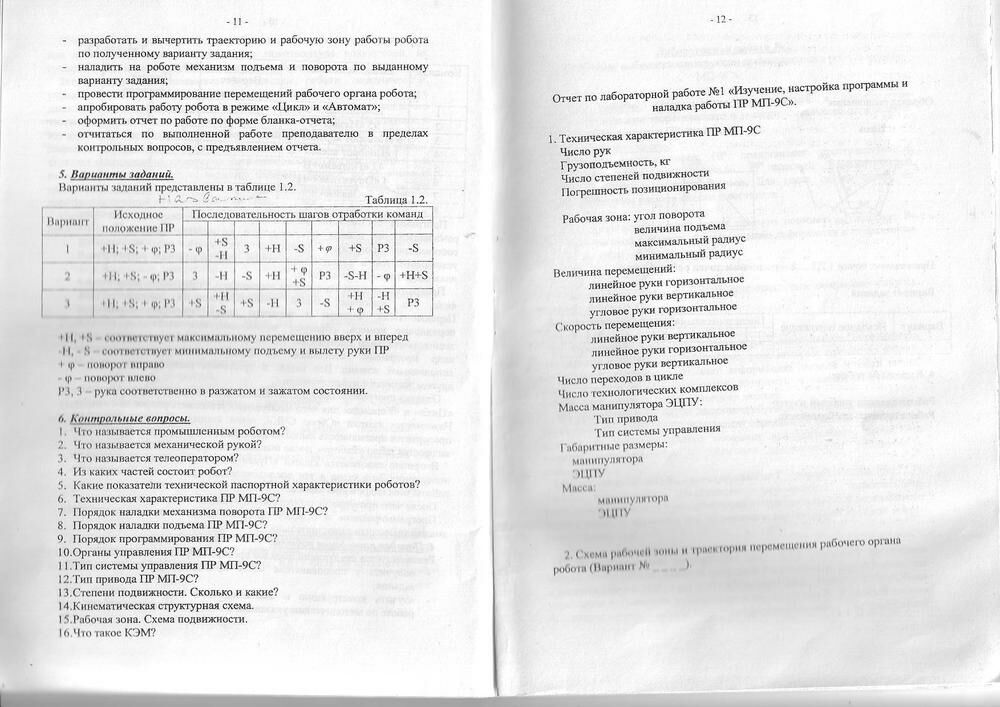
Таблица 1.2
Исхолитм
Пс лгг~г1г
, щгг!вктшггс 1й'
1 ! г!1;'55 у,рг
!11, .15, ~ ~г Р;г ~
тН 5!1
исзики роботовт
г
разработать и вычертить траекторию и рабочую зону работы робота
по полученному варианту задания;
навалить на роботе механизм польема и поворота по выданному
варианту задания,
провести программирование перемещении рабочего органа робота,
апробировать работу робота в режиме «Циклв и «Автомата,
оформить отчет по работе по форме бланка-отчета;
отчитаться по выпсвневной работе преподавателю в пределах
контрольных вопросов, спредьявлением отчета
у. Ларггеггты з«павий.
Нврпюпы заланий прелстаалены в таблице 1 2
Послсдовагеш,ность шагов отработки кпманл от с ь
' з Нггй . Оптжввцтвувт максимаюаюму оерсмсщсщпо вверх и вперед
, у?„Х . ебю вгтел вущ м!щцмяльному полъсму и гшг!ге ту руки ПР
' 9' '. Г!гтгггу!го1 Еврвве
. гу ~го!го?ягт вгюггг~
!х!. 2" рука соог вшот1зенво и разжатом и зажатом состоянии.
6. Ящууолы ь г «говирссьь
1, «Нп пюыиастсв прамыпшснным роботомт
2. Что называется механической рукой?
3. Ч го июывается телсаперзтором?
4. Из каких частей сасгоиз робог?
К Какие пок;патели зехцической паспортной характер
О. Техническая характеристика ПР МП-9С
?. ПОрядок наладки механизма поворота!В' ЫП-9С?
8. Порядокналалки подъема ПР МП-9С'т
9. Порядок программирования ПР МП-9С?
! Олйрганы управления ПР МП-9С?
, 11.Тип системы управлении ПР МП-9С'1
12.Тип привода ПР МП-9Ст
! З.Степени подвижности. Сколько и какие?
14. Кинсмвтическая структурная схема
1« Рабо'пм зона. Схема подвижности
16 г !г о з акое КЭМт
иой аботе №1 гтИзучсние, настройка программы и
Отчет по лабораторной р те гт напалка рабаты ПР - в
1. Техническая характеристика ПР .
а ПР МП-9С
Число рук
Грузоподъемность, кг
Число степенен подвижности
Погршпность позиционирования
Рабочая зона: угол поворота
величина подъема
макс им аль вы и рапи! с
минимальный радиус
Величина перемещении
линейное руки горизонтальное
линейное руки вертикальное
уггювос руки горизонтальное
! !мрешь перемещени»
лииейное руки вертикааьное
линейное руки горюонтмьнос
угвоиос руки вертикюп вое
Число переходов в цикле
'Ыло техиолопгческих комплексов
Масси маннпугштора ЭЦПУ
Тло ривол.
Тзщ системы управления
1 вбери гпмс рюмеры
ь!онивулаюрь
'.Ч,?! Гу
Мг ь! д
Папйптлв1п!гв
'уц!2ъг
и, ' т ~ х иг'зеьг чдсг!Рм рвОО'мгО О!нана 2 1?хвцй!?Обц?гггййт!1№ц,1йя!апфм игг г
робаичг !уулрнь!?гг №з-" ' '.
Распознанный текст из изображения:
- г.г
гйт7гггмв ггьгггоггггонггв
Ивов
В,л бо,у
ггсг
«г
ггзг кег
зя
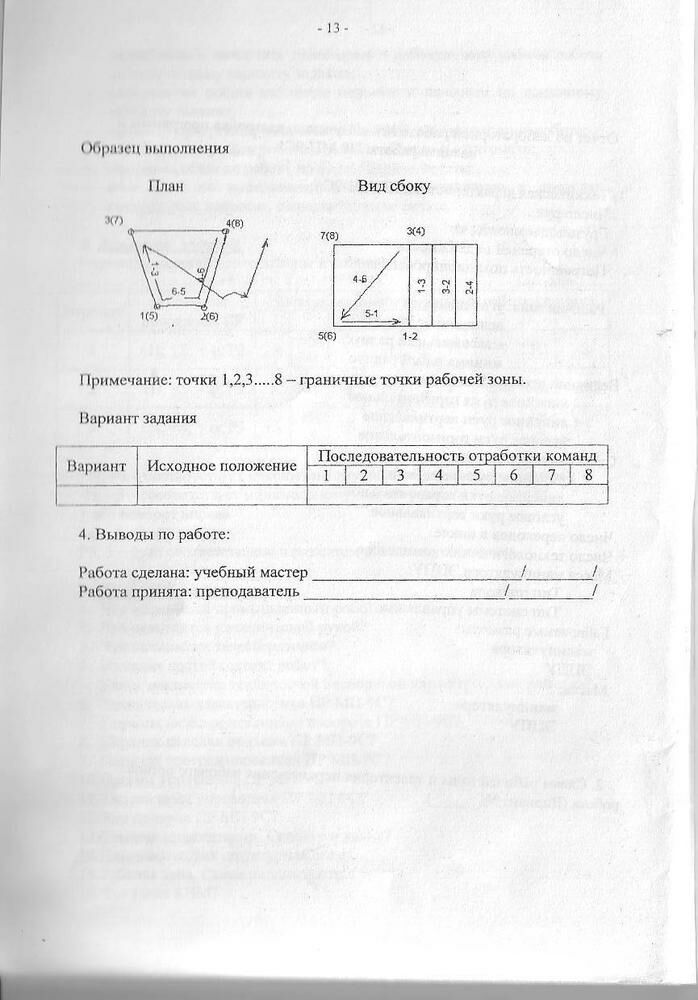
И рнмечаинс, точки 1,2,3 . 8 — граггичглке гочки рабочей зоны
Вариант задания
Т Паслсдоватеаьнасть отоабстки команд ! йарнвлт Исходггос гголожонне ~ — — г — — — ~ — 1 — — 7- 1:Л:,
2)ЗД4~5,б5 7 8
4. Ныаолгг ла рабате
Работа слелана: учебный мастер 7 7 Работа нрюытаг лрслодаватсль 7 7

Начать зарабатывать
 zzyxel
zzyxel
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}