Для студентов МГТУ им. Н.Э.Баумана по предмету Управление техническими системами (УТС)Домашнее задание №2 (Вариант 2)Домашнее задание №2 (Вариант 2)
2021-05-052021-05-05СтудИзба
ДЗ 2: Домашнее задание №2 (Вариант 2) вариант 2
-71%
Описание
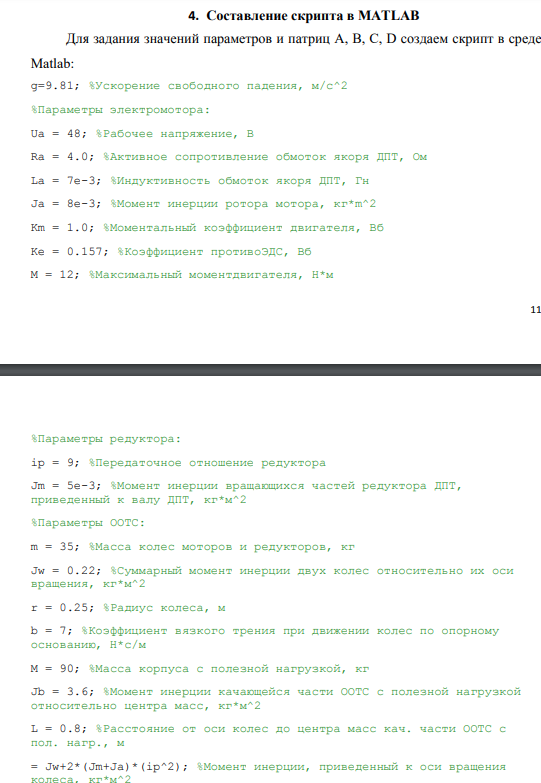
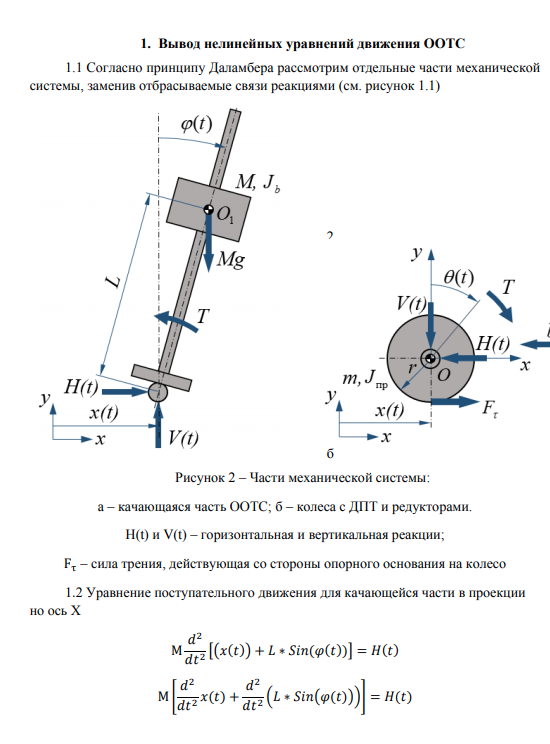
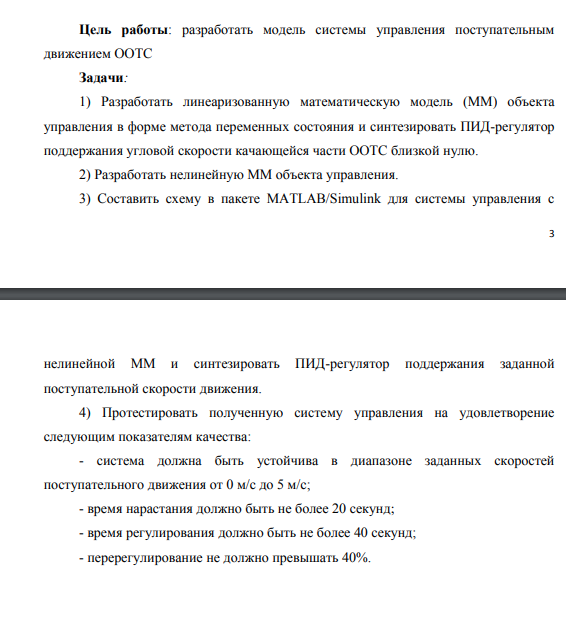
Цель работы: разработать модель системы управления поступательным движением ООТС Задачи: 1) Разработать линеаризованную математическую модель (ММ) объекта управления в форме метода переменных состояния и синтезировать ПИД-регулятор поддержания угловой скорости качающейся части ООТС близкой нулю. 2) Разработать нелинейную ММ объекта управления. 3) Составить схему в пакете MATLAB/Simulink для системы управления с 4 нелинейной ММ и синтезировать ПИД-регулятор поддержания заданной поступательной скорости движения.
![]()
![]()
![]()
![]()


Файлы условия, демо
6.PNG
5.PNG
4.PNG
3.PNG

2.PNG
1.PNG
Характеристики домашнего задания
Учебное заведение
Номер задания
Вариант
Просмотров
62
Покупок
0
Размер
1,73 Mb
Список файлов
- Домашнее задание №2.pdf 2,34 Mb

Ваше удовлетворение является нашим приоритетом, если вы удовлетворены нами, пожалуйста, оставьте нам 5 ЗВЕЗД и позитивных комментариев. Спасибо большое!
 anhyeuem
anhyeuem
05 мая 2021 в 01:13
















