НИР: Система управления поворотом руки робота (a=0.00015, b=0.02)
-41%
Описание
Аннотация
Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, грузоподъёмность, точность движения и т.д. Но независимо от того, стоит ли робот возле станков, передвигается между ними или ползает под потолком, у него всегда есть мощная механическая рука с двумя или четырьмя пальцами. Целью этой руки обычно является перемещение объектов манипулирования и выполнение сложных технологических операций с требуемой точностью. Достижение этой цели связано не только с заданием алгоритма, но и с качеством его системы. В данной работе рассматривается система управления поворотом руки робота. Пояснительная записка содержит 4 части: введение, основную часть, выводы и список используемых источников. Работа состоит из 31 страницы, содержит 3 литературных источников, 16 изображений графиков и структурных схем
Введение
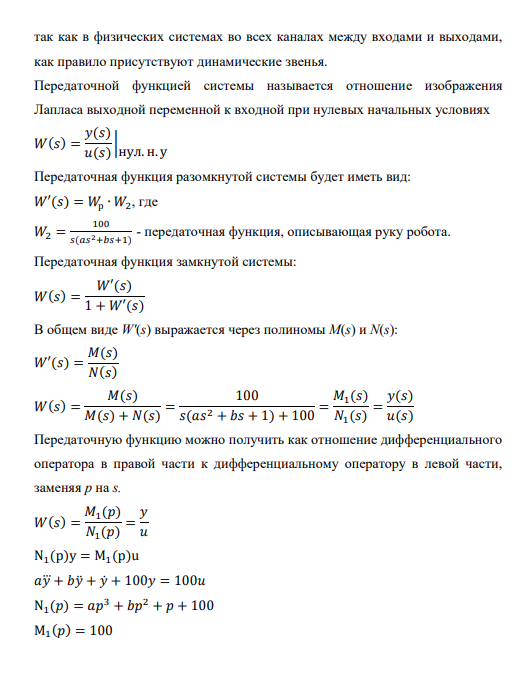
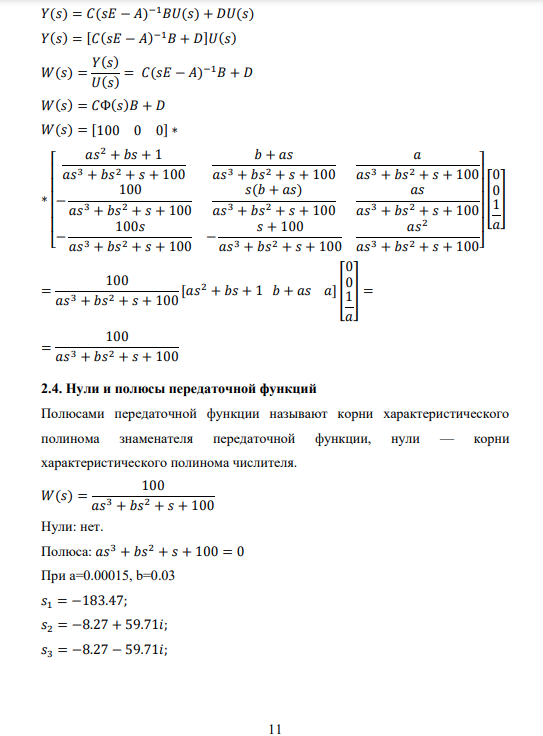
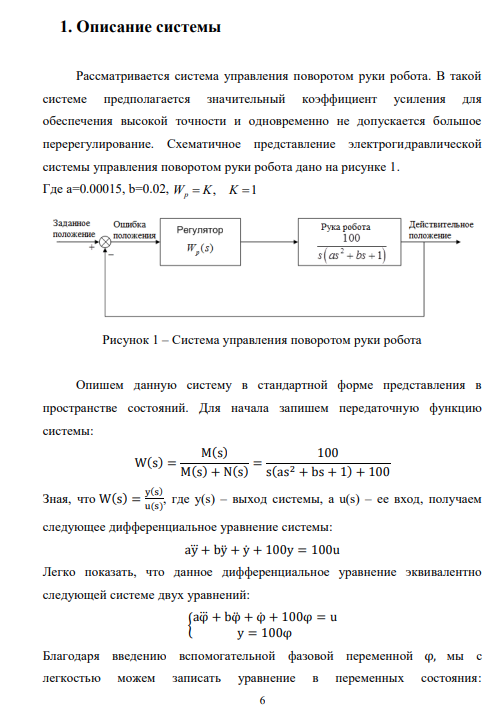
В данной работе рассматривается система управления поворотом руки робота, заданная передаточной функцией, а также регулятором, который обеспечивает необходимое перерегулирование системы. Система должна сохранять в допустимых пределах отклонения действительного значения регулируемой переменной от требуемого значения. Что достигается принципом обратной связи. Рассматриваются способы представления системы в пространстве состояний. После по этим матрицам определяется управляемость и наблюдаемость системы. Также прорабатывается нахождение нулей и полюсов из характеристического уравнения передаточной функции для оценки устойчивости системы. Исследуются переходные характеристики системы в зависимости от ее вида, а также их связь с регулятором. Кроме того рассматриваются алгебраические и частотные способы анализа системы на устойчивость. Выполняется коррекция системы, что бы она удовлетворяла заданным критериям качества. В данной системе изменялся коэффициент усиления регулятора, так чтобы добиться необходимого перерегулирования и времени перехода. Для этих целей использовался метод корневого годографа, который позволил установить необходимые границы коэффициента усиления. В конце работы были найдены запасы устойчивости для итоговой системы.
![]()
![]()
![]()
![]()
Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, грузоподъёмность, точность движения и т.д. Но независимо от того, стоит ли робот возле станков, передвигается между ними или ползает под потолком, у него всегда есть мощная механическая рука с двумя или четырьмя пальцами. Целью этой руки обычно является перемещение объектов манипулирования и выполнение сложных технологических операций с требуемой точностью. Достижение этой цели связано не только с заданием алгоритма, но и с качеством его системы. В данной работе рассматривается система управления поворотом руки робота. Пояснительная записка содержит 4 части: введение, основную часть, выводы и список используемых источников. Работа состоит из 31 страницы, содержит 3 литературных источников, 16 изображений графиков и структурных схем
Введение
В данной работе рассматривается система управления поворотом руки робота, заданная передаточной функцией, а также регулятором, который обеспечивает необходимое перерегулирование системы. Система должна сохранять в допустимых пределах отклонения действительного значения регулируемой переменной от требуемого значения. Что достигается принципом обратной связи. Рассматриваются способы представления системы в пространстве состояний. После по этим матрицам определяется управляемость и наблюдаемость системы. Также прорабатывается нахождение нулей и полюсов из характеристического уравнения передаточной функции для оценки устойчивости системы. Исследуются переходные характеристики системы в зависимости от ее вида, а также их связь с регулятором. Кроме того рассматриваются алгебраические и частотные способы анализа системы на устойчивость. Выполняется коррекция системы, что бы она удовлетворяла заданным критериям качества. В данной системе изменялся коэффициент усиления регулятора, так чтобы добиться необходимого перерегулирования и времени перехода. Для этих целей использовался метод корневого годографа, который позволил установить необходимые границы коэффициента усиления. В конце работы были найдены запасы устойчивости для итоговой системы.
Характеристики НИР
Предмет
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаПросмотров
10
Размер
1,87 Mb
Список файлов
Система управления поворотом руки робота (a=0.00015_ b=0.02).pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
15 мая 2021 в 23:29
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!




















