
Синтез рычажных механизмов
6. Синтез рычажных механизмов
6.1. Постановка задачи, виды и способы синтеза
Задачи синтеза рычажных механизмов в общем случае являются сложными задачами оптимального проектирования, включающими этапы структурного, кинематического и динамического расчёта. Поэтому для упрощения решения рассматриваются частные задачи, в которых учитываются лишь некоторые (основные) условия проектирования.
В зависимости от исходных данных различают следующие виды синтеза:
- геометрический, когда заданы отдельные положения звеньев или траектории отдельных точек;
- кинематический, когда заданы некоторые скорости, ускорения или их соотношения;
- динамический, когда заданы действующие силы или наложены некоторые ограничения на динамические параметры.
К способам синтеза относятся:
а) опытный, когда экспериментальным путём подбираются размеры звеньев для реализации заданной траектории;
Рекомендуемые материалы
б) графический;
в) аналитический.
Возможны различные комбинации видов и способов синтеза, перечисленных выше.
6.2. Решение задач оптимального синтеза стержневых механизмов
При постановке задачи оптимального синтеза следует различать входные и выходные параметры.
Входные – это изначально заданные параметры (размеры звеньев, скорости, ускорения или их соотношения).
Выходные – это параметры, определяемые в результате решения задачи.
При синтезе необходимо учитывать ряд требований кинематического, конструктивного, технологического характера и т. д., среди которых одно, как правило, является главным, а остальные – второстепенными (дополнительными). Если главное требование записать математически в виде функции  , где
, где  - выходные параметры, то такая функция называется функцией цели (целевой), при этом дополнительные условия, выраженные в виде
- выходные параметры, то такая функция называется функцией цели (целевой), при этом дополнительные условия, выраженные в виде  , называются ограничениями.
, называются ограничениями.
Задачей оптимального синтеза является обеспечение экстремального значения Z при соблюдении всех ограничений.
Например, выразив вес механизма в виде функции Z его параметров (длин звеньев) можно решать задачу минимизации Z при соблюдении условий его существования. К таким условиям относятся условия проворачивания кривошипа в шарнирном четырёхзвеннике, условие соблюдения заданного угла давления и ряд других.
При малом числе выходных параметров решение задачи оптимизации может быть получено в аналитической форме. В противном случае используются численные методы направленного, случайного или комбинированного поиска оптимальных решений.
6.3. Условия проворачиваемости кривошипа в шарнирном
четырёхзвеннике
 При проектировании (синтезе) четырёхшарнирного механизма одним из учитываемых условий может быть проворачиваемость звеньев, то есть наличие одного или двух кривошипов. Это зависит от соотношения длин звеньев. Например, для того, чтобы звено АВ четырёхзвенника (рис. 37) могло стать кривошипом, оно должно последовательно пройти через два крайних положения. Используя три положения механизма, получим следующие условия:
При проектировании (синтезе) четырёхшарнирного механизма одним из учитываемых условий может быть проворачиваемость звеньев, то есть наличие одного или двух кривошипов. Это зависит от соотношения длин звеньев. Например, для того, чтобы звено АВ четырёхзвенника (рис. 37) могло стать кривошипом, оно должно последовательно пройти через два крайних положения. Используя три положения механизма, получим следующие условия:
для положений 1, 2, 3, предварительно обозначив длины звеньев: 
При этом:


рис.37 
то есть сумма длин кривошипа и любого другого звена меньше суммы остальных звеньев.
Сложим попарно полученные неравенства и получим:


 , то есть кривошип является самым коротким звеном. А если данные условия не выполняются, то механизм будет либо двухкривошипным, либо двухкоромысловым. Эти условия используются при геометрическом синтезе.
, то есть кривошип является самым коротким звеном. А если данные условия не выполняются, то механизм будет либо двухкривошипным, либо двухкоромысловым. Эти условия используются при геометрическом синтезе.
6.4. Учёт углов давления в стержневых механизмах
 Углы давления во многом определяют условия работы механизма. Так как угол давления
Углы давления во многом определяют условия работы механизма. Так как угол давления  (рис. 38), измеряемый между вектором силы и вектором скорости в точке её приложения, влияет на трение и износ в кинематических парах, то эти углы, в частности их максимальные значения при синтезе ограничивают для исключения возможности заклинивания и уменьшения коэффициента полезного действия. Для упрощения расчётов, связанных с определением углов давления, обычно пренебрегают тангенциальными составляющими реакций, что позволяет находить наихудшие положения с точки зрения риска заклинива-
(рис. 38), измеряемый между вектором силы и вектором скорости в точке её приложения, влияет на трение и износ в кинематических парах, то эти углы, в частности их максимальные значения при синтезе ограничивают для исключения возможности заклинивания и уменьшения коэффициента полезного действия. Для упрощения расчётов, связанных с определением углов давления, обычно пренебрегают тангенциальными составляющими реакций, что позволяет находить наихудшие положения с точки зрения риска заклинива-
рис. 38 ния и назначать длины звеньев  , обеспечивающие приемлемые условия работы при заданном предельном угле
, обеспечивающие приемлемые условия работы при заданном предельном угле  (рис. 38), то есть при
(рис. 38), то есть при 
Углы  называются углами передачи и ограничиваются при проектировании величиной
называются углами передачи и ограничиваются при проектировании величиной  .
.
6.5. Синтез четырёхзвенника по трём заданным положениям шатуна
 Так как точки В и С шарнирного четырёхзвенника описывают дуги окружностей (рис. 39), то проведя перпендикуляры через середины хорд, соединяющих концы шатуна в трёх положениях, получим центры вращения звеньев АВ и CD (точки A и D). Вид синтеза – геометрический; способ синте-
Так как точки В и С шарнирного четырёхзвенника описывают дуги окружностей (рис. 39), то проведя перпендикуляры через середины хорд, соединяющих концы шатуна в трёх положениях, получим центры вращения звеньев АВ и CD (точки A и D). Вид синтеза – геометрический; способ синте-
рис. 39 за – графический.
6.6. Синтез кривошипно-кулисного механизма по заданному
коэффициенту изменения скорости хода
 Одной из кинематических характеристик стержневого механизма может служить коэффициент изменения скорости хода
Одной из кинематических характеристик стержневого механизма может служить коэффициент изменения скорости хода  представляющий собой отношение средней скорости холостого хода
представляющий собой отношение средней скорости холостого хода  к средней скорости рабочего хода
к средней скорости рабочего хода  .
.
При равномерном движении кривошипа коэффициент равен:
рис. 40  ,
,
где S – ход ползуна;  - время рабочего и холостого хода;
- время рабочего и холостого хода;  - угловая скорость кривошипа;
- угловая скорость кривошипа;  - угол размаха кулисы.
- угол размаха кулисы.
При заданном можно определить или наоборот. Используя дополнительные конструктивные соображения, можно определить размеры всех звеньев механизма.
Вид синтеза – кинематический; способ – графо-аналитический.
6.7. Синтез кривошипно-ползунного механизма по некоторым
заданным размерам
 Кривошипно-ползунный механизм характеризуется пятью параметрами:
Кривошипно-ползунный механизм характеризуется пятью параметрами: 
 (рис. 40), при этом можно записать два аналитиче-
(рис. 40), при этом можно записать два аналитиче-
рис. 41 ских выражения, связывающие эти параметры:  ;
;  .
.
Таким образом, задавая три параметра из пяти, можно определить два оставшихся из указанных выражений. Например, задав величины  , можно определить
, можно определить  .
.
Вид синтеза – геометрический; способ – аналитический.
6.8. Понятие о синтезе механизма по заданному закону движения
выходного звена
Пусть задан закон движения ведомого звена (угла поворота коромысла - Ψ) в зависимости от угла поворота кривошипа φ, например, в четырёхшарнирном механизме (рис. 42).
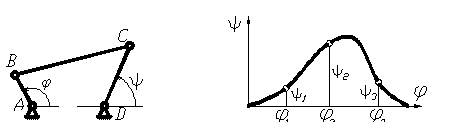
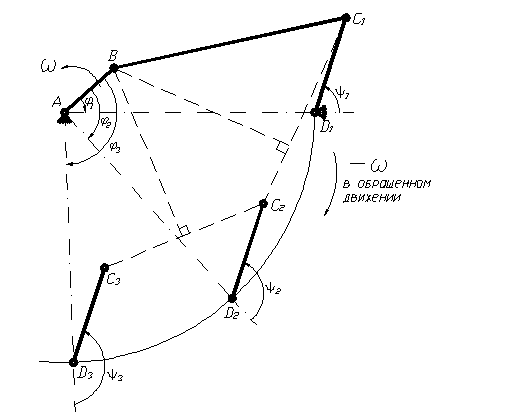
рис. 42
Приближенный синтез включает разбивку всего интервала по оси графика  по оси абсцисс
по оси абсцисс  на участки, соответствующие трём произвольным значениям
на участки, соответствующие трём произвольным значениям  . Используется метод обращения движения, когда механизму условно задаётся движение, обратное кривошипу. Если заданы длина коромысла и межцентровое расстояние, то по трём положениям в обращённом движении можно найти размеры шатуна и кривошипа согласно рис. 42, где т. В находят как центр вращения т. С в обращённом движении. Существует постановка задачи, когда отыскивается оптимальный закон движения с точки зрения различных параметров: скорости, ускорения, работы динамических сил и т. д.
. Используется метод обращения движения, когда механизму условно задаётся движение, обратное кривошипу. Если заданы длина коромысла и межцентровое расстояние, то по трём положениям в обращённом движении можно найти размеры шатуна и кривошипа согласно рис. 42, где т. В находят как центр вращения т. С в обращённом движении. Существует постановка задачи, когда отыскивается оптимальный закон движения с точки зрения различных параметров: скорости, ускорения, работы динамических сил и т. д.
6.9. Понятие о синтезе механизма по заданной траектории
 Часто требуется спроектировать механизм с заданной траекторией движения ведомого звена. Например, четырёхшарнирный механизм стрелы портального крана позволяет перемещать груз горизонтально при вращении стрелы в вертикальной плоскости (рис. 43). Синтез таких механизмов осуществляется графическими и аналитическими методами с использованием теории функций с наибольшим приближением к заданной траектории. В этой области имеются работы Чебышева, который первым предложил решение задачи для лямбдообразного прямила Чебышева, положенного в
Часто требуется спроектировать механизм с заданной траекторией движения ведомого звена. Например, четырёхшарнирный механизм стрелы портального крана позволяет перемещать груз горизонтально при вращении стрелы в вертикальной плоскости (рис. 43). Синтез таких механизмов осуществляется графическими и аналитическими методами с использованием теории функций с наибольшим приближением к заданной траектории. В этой области имеются работы Чебышева, который первым предложил решение задачи для лямбдообразного прямила Чебышева, положенного в
рис. 43 основу конструкции стрелы портального
крана (рис. 43).
Искомыми параметрами являются длины звеньев, включая и длину  .
.
6.10. Общий порядок проектирования рычажного механизма
Процесс проектирования рычажного механизма включает следующие основные этапы:
Тактильные ощущения слепых - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
1. Производится синтез кинематической схемы (определяются длины звеньев по заданным условиям).
2. Принимается упрощённый закон движения входного звена, определяются скорости и ускорения звеньев, производится приближённый силовой расчёт (определяются реакции в кинематических парах).
3. По найденным усилиям подбираются сечения звеньев и определяются их массы.
4. Производится приведение сил и масс, подбор маховика и определение истинного закона движения звена приведения.
5. При найденном законе движения звена приведения находятся уточнённые значения скоростей и ускорений, определяются более точные величины реакций и производится проверка прочности и жёсткости звеньев. Размеры сечений и массы звеньев последовательно уточняются.
Иногда используют более простую последовательность, в которой расчёт ведётся при заданных длинах и массах звеньев, а также при упрощённом законе движения входного звена.



















