
Классификация промышленных роботов
Классификация промышленных роботов.
по способу организации управления:
- автоматические
- дистанционно-управляемые
Автоматические промышленные роботы - работают по программе, без участия человека. Наладчик производит отладку, разрабатывает программу.
Дистанционно-управляемые промышленные роботы- управление роботом с участием человека (с помощью задающих рукояток, традиционно, трёхстепенных). Программа решает прямую и обратную кинематические задачи.
по принципу управления:
- программные
- адаптивные
- интеллектуальные
Программные промышленные роботы - работают по жесткой, заранее заложенной программе; допускается изменение порядка выполнения программы- программы ветвления (сигналы технологического оборудования – обыкновенные сигналы да/ нет).
Адаптивные промышленные роботы - приспосабливаются к изменениям внешней среды (рабочей зоны), имеют сенсорные датчики (СТЗ, сило-моментные системы), программы адаптации должны быть заранее составлены.
Интеллектуальные промышленные роботы - конечная цель операции заранее неизвестна, но известен набор объектов с их характеристиками и алгоритм работы с каждым объектом, имеется решающее правило, которое позволяет перепланировать действия (знания накапливаются).
Классификация устройств управления.
Рекомендуемые материалы
Устройство управления - устройство, которое служит для формирования и выдачи управляющего воздействия на исполнительные устройства в соответствии с управляющей программой.
Наиболее распространенная классификация по принципу позиционирования рабочего органа. Устройства управления делятся на 3 вида:
- цикловые
- позиционные
- контурные
Цикловые устройства управления – простые, работают по механическим упорам, которые оснащены концевыми датчиками. Производится программирование последовательности перемещения каждого звена, число точек позиционирования ограничено. В общем случае перемещение каждого звена ограничивается начальным и конечным упорами. Существуют роботы, у которых есть промежуточные упоры.
Обычно имеют либо пневматические, либо гидравлические приводы, электромеханические приводы редки.
Пневматические приводы - скорость меньше, высокая точность позиционирования, более просты в обслуживании, подключаются к одному трубопроводу, дешевые (штамповочный пресс).
Гидравлические приводы- дорогие гидростанции, нужна высокая скорость перемещения и большая грузоподъемность (роботы для загрузки мартеновских печей).
Позиционные устройства управления - каждая степень имеет много точек позиционирования, количество определяется конструкцией датчика, диапазоном. Погрешность датчика- 0.1 мм, используются либо шаговые двигатели (ставят концевые датчики, которые проверяют пропуск шага, проводят начальную калибровку), либо следящие приводы (наиболее универсальные, системы управления более сложная). Управление по жесткой программе, по обобщенным координатам (отдельным степеням). Позиционная система управления обеспечивает переход из начальной точки в некоторую конечную, гарантируется только попадание в конечную точку, перемещение возможно с разной скоростью, не гарантируется отработка траектории между начальной и конечной точками. Накладывается ограничение по объему программы, количеству точек. Переход по шагам может влиять на величину перемещения. Число шагов должно быть соизмеримо с погрешностью операции.
Контурные устройства управления - строятся на следящих приводах, их отличительная особенность - обеспечивают траекторию движения из начальной точки в конечную.
Очень часто используются комбинированные системы управления (контурно-позиционная система управления - перемещение по позиционному закону и контурному закону).
Методы программирования.
- обучение
достоинство: простота
недостаток: сложно создать программу
- аналитический
программа в виде текста на робото-ориентированном языке
достоинство: легко создавать программы
недостаток: необходимость аналитического задания координат точек
- комбинированный (аналитический с обучением)
программа на робото-ориентированном языке, координаты в режиме обучения
достоинство: не надо всегда задавать точки
недостаток: сложность переобучения
Обобщенная структурная схема автоматизации роботов.
Четыре уровня управления:
- исполнительный
- тактический
- стратегический (адаптивный)
- интеллектуальный
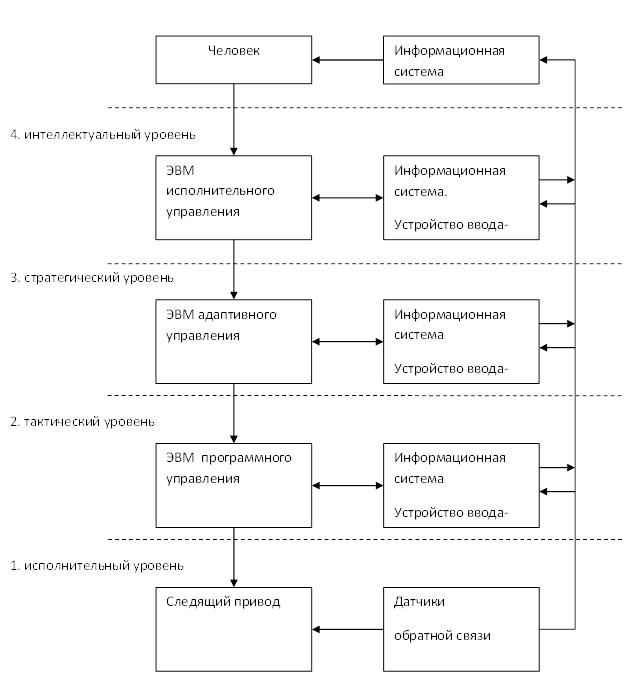
Основная задача исполнительного уровня - управление каждой степенью.
Следящий привод - замкнутая обратная связь по положению и по скорости. Корректирование обратной связи по скорости, может быть по ускорению.
Рассмотрим сложную систему.
Датчик обратной связи - датчик цифровой, иногда используется датчик скорости. Датчики обратной связи делятся на 2 группы - фотоимпульсные и кодовые.
Кодовые датчики - диск, много дорожек. Стоит после редуктора, дает абсолютное положение. Если отключить робота, то информация о положении не теряется. Вместе с кодовым датчиком ставят тахогенератор.
Недостатки: меньшая точность, неточный код скорости, т.к. стоит на выходном валу
Фотоимпульсные датчики - ставят на вал двигателя, оптический диск с металлизацией. Существует дорожка 1имп/об, 2 информационные дорожки, определяется знак скорости. Если отключить питание, информация об абсолютном положении теряется. Необходимо выполнить процесс калибровки, тогда определяется абсолютное положение, а так работать в декартовой системе координат невозможно.
Достоинства: большая точность, позволяет получить код скорости, поэтому скоростной датчик не нужен, можно определить временной интервал.
Современные следящие приводы реализуются на базе микроконтроллеров.
На тактическом уровне происходит координация движения всех степеней подвижности, организация синхронного управления. Решаются прямая и обратная кинематические задачи. Реализуется программное управление, работа по жесткой программе. Гибкость-ветвление по программе. Датчики- средства ввода-вывода, выдача сигналов для управления технологическим оборудованием. Информационная система-СТЗ.
Стратегический уровень (адаптивный):
адаптация по зрению, сило-моментное, тактильное очувствление (ощущение - головки, щупы). Информационные системы - СТЗ, сило-моментное, тактильное очувствление. Устройства ввода-вывода - обыкновенные устройства. Задачи - планирование действий с учетом изменения рабочей сцены (координаты, силы и момент). Программное обеспечение не жесткое, интеллекта еще нет.
Интеллектуальный уровень - информационные системы те же, не нужны датчики обратной связи. Задачи - решение заранее не запрограммированных задач, которые формально еще не описаны. Человек может иметь изображение (зрение и ощущение), информацию о силах и моментах.
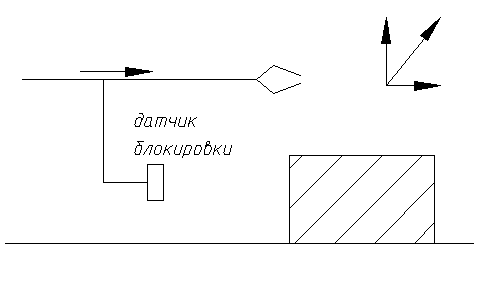
Цикловые системы управления.
Программирование циклового робота:
I этап- установка механических упоров для каждого звена (гаечным ключом).
II этап- задается последовательность перемещений отдельных звеньев, выдача и прием сигналов от технологического оборудования, ввод информации с датчика, используемая информация дискретного вида. Величина перемещения определяет смещение механического упора (max перемещение), управление приводом строится по разомкнутому циклу. Динамика робота: обеспечение простого механического регулирования. Скорость перемещения регулируется дросселем, подход к упорам задается демпфером.
Существует два основных принципа для циклических роботов:
- путевой принцип - окончание перемещения фиксируется по срабатыванию датчика
- временной принцип - окончание перемещения фиксируется по таймеру, не требуется фиксация конечного положения.
Блок-схема.
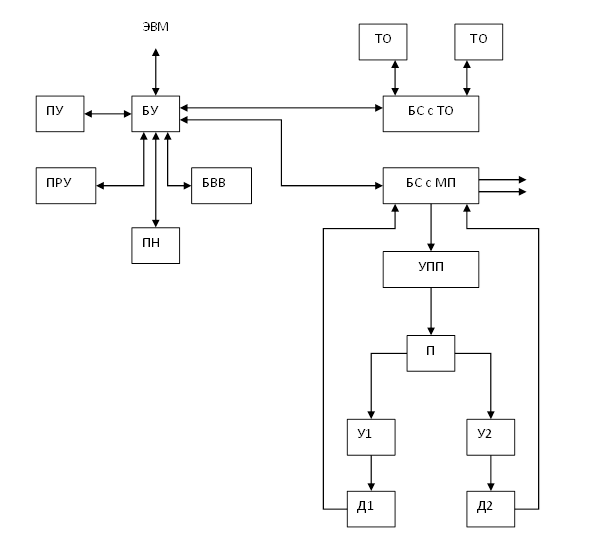
ПУ – панель управления
ПРУ - пульт ручного управления
БУ - блок управления
ПН - программный носитель
БВВ - блок выдержек времени
ТО - технологическое оборудование
УУП - устройство управления приводом
П - привод
У1, У2 - упор
Д1,Д2 - датчик
БС с МП - блок связи с манипулятором
Основной блок системы - БУ. В его задачи входит взять программу из ПН, дешифрировать ее и по заданному управлению выдать ее на другие устройства. БУ-конечный автомат. Работа осуществляется по жесткому циклу.
Вспомогательные функции: тестирование устройства во время работы, связь с ЭВМ верхнего уровня управления.
ПН служит для набора и хранения программ управления и последовательности их исполнения.
ПУ для задания режимов работы робота, осуществляет пуск-останов программы, отображает информацию о роботе лампочками.
ПРУ служит для обучения перемещению (дистанционное устройство).
БВВ задает интервал времени для организации временного принципа управления, это и устройство управления, и технологическое оборудование.
БС с ТО для обмена информацией с технологическим оборудованием, может работать и по путевому, и по временному принципам.
БС с МП для организации интерфейса с манипулятором.
Режимы работы цикловых систем управления.
Основной режим - автоматический, работает, пока не остановят. Выполнение одного цикла программы(для проверки), не включают технологическое оборудование.
Режим ручного управления служит для наладки работы робота (правильность установки упоров).
Режим обучения состоит из механически установленных упоров, установки дополнительных датчиков, временной задержки (самой величины), набора программ.
Перспективы развития цикловых систем управления.
1. улучшение характеристик приводов
2. увеличение точек позиционирования (установка дополнительных, программируемых упоров)
3. увеличение числа команд
4. организация более сложной логики управления, организация ветвления и циклов
5. удобство организации подпрограмм
6. обработка прерываний
7. увеличение емкости ПН
8. облегчение программирования робота и организация его связи с ВУ (сеть)
9. программирование упоров
10. совершенствование алгоритма торможения роботов при походе к упору
Устройство управления ЭЦПУ 6030.
(электронно-цикловое программное устройство)
Типовое программное устройство, предназначено для управления цикловым роботом до 6 координат (схват тоже входит).
Используется для манипулятора МП9С.
Основные характеристики:
- число одновременно управляемых координат-6 , из них управляется по путевому принципу- 4, по временному принципу-2.
- число точек позиционирования по каждой степени-2
- число технологических команд-6
- число программ блокировки (опрос датчика блокировки)- 4
- число программ выдержек времени-1
(можно устанавливать в интервале от 0 до 0.7 с)
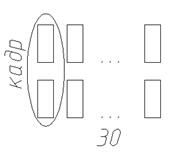
- число шагов (кадров) программы- до 30
- сигналы управления - промышленный стандарт I до 400 мА, U=24 В.
- сигналы датчиков I=20 мА, U=24 В.
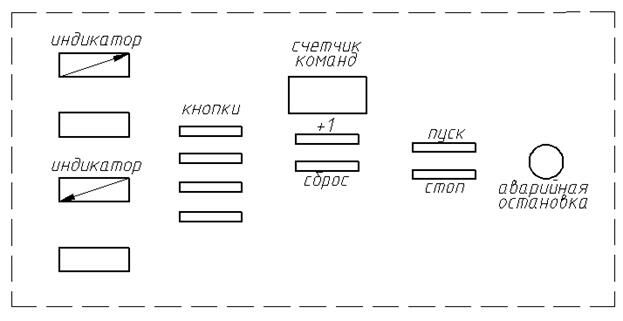
Режимы работы.
- ручной - используется в процессе наладки, для проверки точек позиционирования, выдачи сигналов управления технологическим оборудованием, задания выдержек времени.
- команда - пошаговая отработка команды (30 шагов). При нажатии на кнопку «пуск» отработка данного шага программы.
- цикл - для режима проверки нужно прогнать только 1 цикл.
- автоматический – бесконечное выполнение заданной программы, остановка- нажатие «стоп».
На задней панели 2х позиционный переключатель. Один- отмена технологической программы (команды), второй- переключение 5 и 6 звена. Управление либо по путевому принципу, либо по временному (подключение устройства типа схват).
Три переключателя для технологических команд, сгруппированы по 2 команды.
1-ый - для технологических команд
2-ой - для звеньев 5 и 6
3-ий – для команды программной задержки
Потенциометр для задания выдержек времени.
Два условных перехода:
- условие пропуска - пропуск команды. Сигнал пропуска - отсутствие сигнала -24 В.
- условный переход - на фиксированном 20м шаге.
Манипулятор МП9С.
Предназначен для обслуживания штамповочных прессов.
Кинематическая схема.
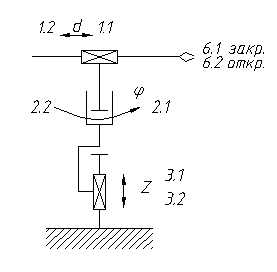
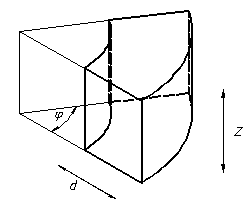
Технические характеристики манипулятора:
- грузоподъемность -200 г
- выдвижение руки d -150 мм
- подъем руки z -30 мм
- поворот руки f- 1200
- время max перемещения (при max раздвижении)- не более 0.5 с
поворот - не более 0.8с
- точность позиционирования +- 0.05 мм
Тип привода - пневматический.
Работа каждого звена осуществляется по конечным регулируемым упорам, каждый упор оснащен датчиком конечного положения, на каждом упоре установлены демпферы для того, чтобы гасить удар (демпферы гидравлические и пневматические). У демпфера регулирующий дроссель – для обеспечения динамики подхода к упорам и регулирования скорости перемещения.
Структурная схема УУ ЭЦПУ 6030.
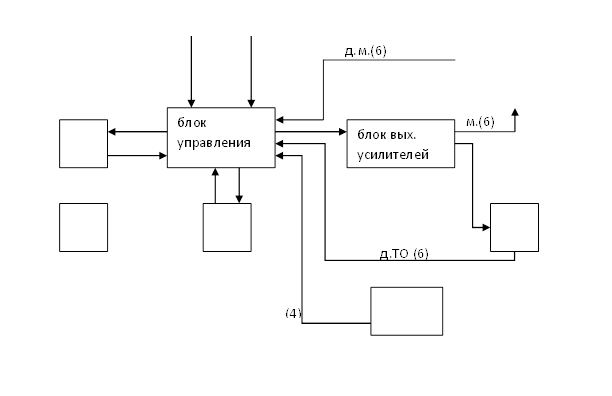


БП - блок питания
ПН – программоноситель
ПУ - пульт управления
Д. Бл.- датчик блокировок
д.м.- датчик манипулятора
Основной элемент - блок управления.
Устройство ПН: 2 наборных поля, одно над другим, по 30 шагов каждое. Каждый шаг содержит 2 команды, используется 10позиционный переключатель.
Структурная схема блока управления.
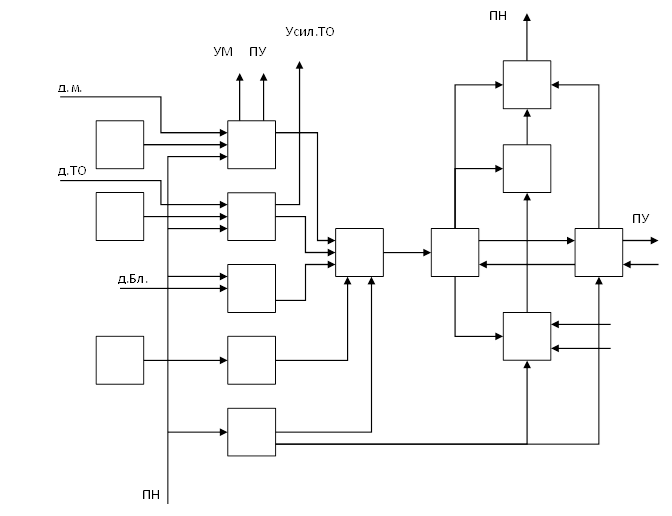
ВВ- блоки выдержек времени
1- схема отработки команд управления манипулятором (либо по временному, либо по путевому принципам)
2- схема отработки команд управления технологическим оборудованием
3- схема отработки команд автоблокировки
4- схема отработки команд программ задержки
5- схема формирования сигналов управления (для синхронизации)
6- схема формирования сигнала перехода к следующему шагу программы
7- схема помехозащиты счетчика команд
8- схема отработки сигналов «пропуск» или «переход»
9- схема пуска-останова
10- счетчик шагов (команд)
11- дешифратор выборки команд из ПН
Объем программы  30 кадров. Существует верхнее и нижнее поля набора. Каждая команда задается положением 10 позиционного переключателя (0...9). Программа начинается с 0 кадра, окончанием программы служит команда- окончание программы или 30 шаг.
30 кадров. Существует верхнее и нижнее поля набора. Каждая команда задается положением 10 позиционного переключателя (0...9). Программа начинается с 0 кадра, окончанием программы служит команда- окончание программы или 30 шаг.
Всего 27 команд, разбитых на 4 группы.
| I. Команды управления звеньями манипулятора. | |||
| № | команда | код | |
| верхнее поле | нижнее поле | ||
| 1 | звено 1-1(вперед) | 1 | * |
| 2 | звено 1-2(назад) | 2 | * |
| 3 | звено 2-1(вправо) | 3 | * |
| 4 | звено 2-2(влево) | 4 | * |
| 5 | звено 3-1(вверх) | * | 1 |
| 6 | звено 3-2(вниз) | * | 2 |
| 7 | звено 4-1(манипулятор) | * | 3 |
| 8 | звено 4-2(резерв) | * | 4 |
| 9 | звено 5-1 | 5 | * |
| 10 | звено 5-2 | 6 | * |
| 11 | звено 6-1(закрыть схват) | * | 5 |
| 12 | звено 6-2(открыть схват) | * | 6 |
| II. Команды управления технологическим оборудованием. | |||
| 13 | Техкоманда 1 | 9 | 1 |
| 14 | Техкоманда 2 | 9 | 2 |
| 15 | Техкоманда 3 | 9 | 3 |
| 16 | Техкоманда 4 | 9 | 4 |
| 17 | Техкоманда 5 | 9 | 5 |
| 18 | Техкоманда 6 | 9 | 6 |
| III. Команды опроса датчика блокировок. | |||
| 19 | Датчик 1 | 7 | * |
| 20 | Датчик 2 | 8 | * |
| 21 | Датчик 3 | * | 7 |
| 22 | Датчик 4 | * | 8 |
| 23 | выдержка времени | * | 9 |
| IV. Команды управления программой. | |||
| 24 | пропуск след.шага | 9 | 7 |
| 25 | переход (на 20 шаг) | 9 | 8 |
| 26 | останов программы | 9 | 9 |
| 27 | конец программы | 0 | 0 |
При выполнении команды пропуска проверяется условие пропуска, если «да», то пропускает (счетчик +2), если «нет», то выполняется следующий шаг (счетчик +1). Конец программы ограничивает цикл (длину программы), при использовании перехода на 20 шаг, после него тоже может быть поставлена команда 00. При достижении 30 шага программа начинается с 1го шага.
Для III группы: если вместо * 0, то перехода к следующему шагу не будет, пока не сработает датчик блокировки;
если вместо *=1-6, то проверка датчика блокировки одновременно с командой управления манипулятором.
Переход к следующему шагу возможен по одному из двух событий:
- окончание движения данной степени (срабатывает концевой датчик или истекает время)
- срабатывает датчик блокировки
1. 17 движение вперед + опрос датчика №3
2. 11 движение вперед и вверх
1 сохраняется, иначе неопределенное положение
Код 09-проверка таймера (программная задержка)
*9
*=1-6
97 осуществляется при отсутствии сигнала -24 В на входе
98 условие перехода при отсутствии -24 В на входе
99 аварийная остановка
00 в автоматическом режиме возврат на начало программы
Пример:
Обслуживание пресса, управление через ТО (ТК3, ТК4):
ТК3 пресс опустить
ТК4 пресс поднять
Заготовка подается с помощью барабана-накопителя. Управление барабаном через ТК5,ТК6:
ТК5 включить
ТК6 выключить
Управление транспортером ТК1, ТК2:
ТК1 выключить
ТК2 включить
Исходное положение-заготовка на транспортере, транспортер и барабан выключены, пресс поднят, манипулятор у барабана: 1 звено втянуто, 2 звено вправо. Схват раскрыт.
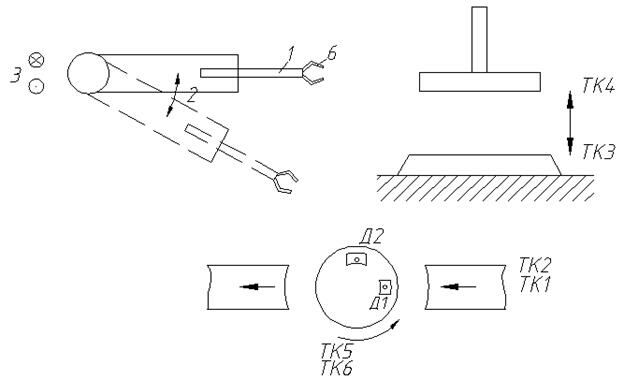
- переместить заготовку на барабан
- установить деталь в пресс
- обработать деталь
- поставить на барабан
Циклограмма.
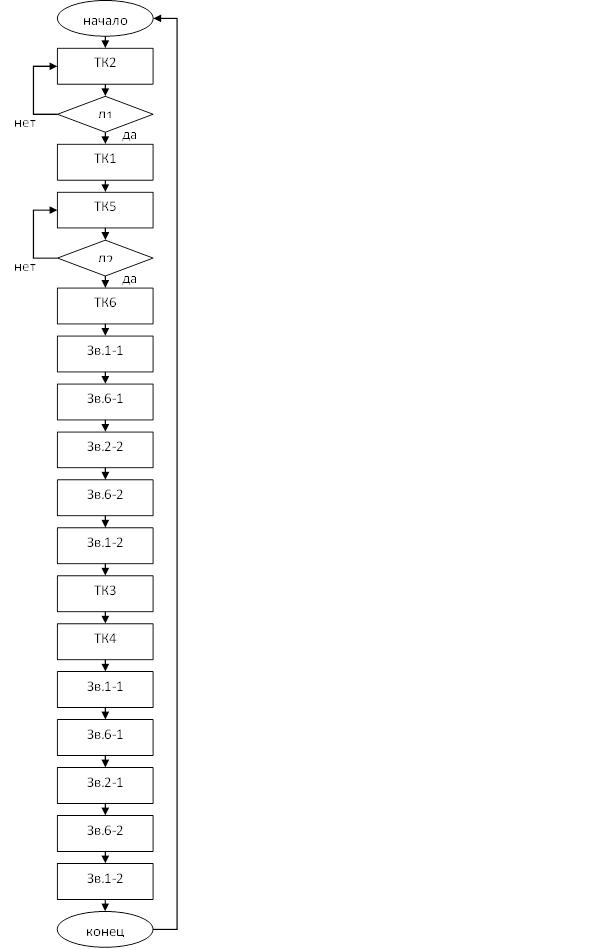






| 0 | 92 | включить транспортер | |
| 1 | 71 | опрос Д1 | |
| 2 | 91 | выключить транспортер | |
| 3 | 95 | включить барабан | |
| 4 | 80 | опрос Д2 | |
| 5 | 96 | выключить барабан | |
| 6 | 10 | выдвинуть руку | |
| 7 | 05 | сжать схват | |
| 8 | 40 | поворот влево | |
| 9 | 06 | разжать схват | |
| 10 | 20 | втянуть руку | |
| 11 | 93 | опустить пресс | |
| 12 | 94 | поднять пресс | |
| 13 | 10 | выдвинуть руку | |
| 14 | 05 | сжать схват | |
| 15 | 30 | поворот вправо | |
| 16 | 06 | разжать схват | |
| 17 | 20 | втянуть руку | |
| 18 | 00 |
РОН – регистр общего назначения
R0 – R5 – общие регистры(без специфики).
R6, R7 – регистры специального назначения.
Обычно R6 – указатель стека, R7- счетчик команд.
Если R6 и R7 используются по назначению, то их содержимое уменьшается или увеличивается на 2. Счетчик команд – его содержание тоже может изменяться только на 2.
Система прерывания.
Прерывания делятся на:
- Радиальные
- Векторные
Радиальные прерывания – имеют фиксированный адрес вектора прерывания.
Векторные прерывания – адрес вектора прерывания задается самим устройством.
Т.о. с 0 по 376(8 находятся адреса векторов прерываний.
Адресное пространство:
| 0…376 | |
| 0 | |
| 1 | 20000 40000 60000 100000 120000 140000 160000 Особенный банк – адреса внешних устройств |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 |
| 15 | 14 | 13 | 12 | 10 | 9 | |
| 1 | 1 | 1 | 0 |
В машине аппаратно определяется, какой сигнал обращения. Наличие 111 в старших разрядах – обращение к внешнему устройству.
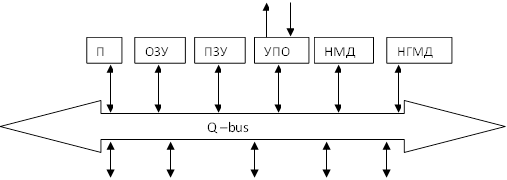
Это процессор «фон Неймовского» типа, при этом данные и коды команд находятся в одном адресном пространстве. Шины данных и команд общие(Q-bus).
Существует также гарвардская архитектура процессора – коды команд и данные находятся в различных адресных пространствах. Шины данных и команд разделены.
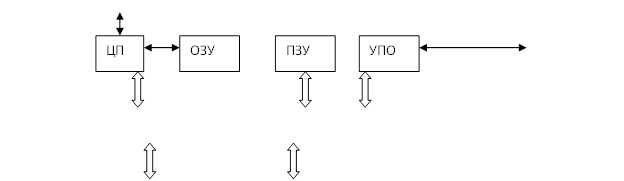
Структурная схема: дисплей.
Внешние сети
 | |||||||||||||
 |  |  |  |  | |||||||||
 | |||||||||||||
П – процессор
УПО – устройство последовательного обмена
Есть два стандарта:
RS 232C
RS 485 – промышленный стандарт
Монитор + клавиатура = дисплей (терминал).
НМД – накопитель на магнитных дисках
НГМД – накопитель на гибких магнитных дисках (используется только как носитель программ пользователя)
УПВВ – устройство параллельного ввода/вывода – обмен дискретными сигналами типа «да», «нет»
УПДП – устройство прямого доступа к памяти. Наиболее быстрое устройство для обмена массивами данных, является активным устройством. Перехватывает функции процессора по управлению шиной данных (например, быстродействующие СТЗ).
Специальные устройства – например, преобразователь КОД-ШИМ.
Любой процессор всегда стартует с нуля. В системной области памяти процессора начальный запуск осуществляется с нулевого адреса. Там находится программный монитор.
Задачи программного монитора:
- Обеспечение интерфейса с пользователем.
- Обработка системных прерываний.
- Управление пуском и остановом программы пользователя.
- Обслуживание стандартных устройств (драйвера). Можно прошить стандартные операции работы с внешними устройствами.
- Тестовые программы.
Режимы обмена информацией между процессором и устройством
Существуют три основных режима обмена информацией:
- Программный режим
- Режим прерывания
- Режим прямого доступа к памяти (ПДП)
Программный режим – обмен информацией с устройством происходит после установки флага готовности данного устройства.
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
1
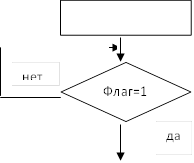 |


 Достоинство: простота.
Достоинство: простота.
Недостаток: процессор
простаивает.
Режим прерываний – режим, при котором в шестом разряде находится маска разрешения прерываний. Необходимо разрешение всех внешних прерываний.
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
1
Мы разрешаем все прерывания от внешних устройств. Устройство устанавливает 1 в седьмой разряд. Наличие этих двух единиц вызовет сигнал в Q-шине. Далее процессор заканчивает выполнение текущей команды.
В данной машине:
|
| |
|
| àСК |
| ССП | à регистр состояния |

ССП – слово состояния процессора. СК – счетчик команд.
Стек в данной машине инкрементный.
| à1000 | Адр. прер. |
| 2 | ССП |
| à |
Адрес – текущее содержимое счетчика команд СК = R7. Это все делается аппаратно. Указатель стека – R6. В СК заносится первое слово по адресу вектора прерывания. В регистр состояния процессора заносится второе слово из вектора прерывания. Далее процессор продолжает свою работу. Затем в стек заносятся те параметры, которые необходимо сохранить. Далее происходит выполнение основного тела программы обслуживания прерывания. Затем происходит выполнение программы возврата из прерывания. По этой команде аппаратно восстанавливается значение ССП и адрес возврата в основную программу. Далее следует продолжение выполнения прерванной программы.
Есть две различные команды: ret и reti. В отличие от команды возврата из программы команда возврата из прерывания разрешает прерывание всех внешних устройств.
Достоинство: процессор не простаивает.
Недостаток: быстродействие ниже, чем в режиме ПДП.
Режим прямого доступа к памяти
Устройство ПДП выставляет запрос центральному процессору на обмен в режиме ПДП. Если центральный процессор разрешает режим ПДП, соответственно поступает сигнал ПДП. После этого процессор останавливается. Управление шиной берет на себя устройство ПДП. У устройства есть фиксированный адрес обмена массивом данных. Это устройство загружает данные или читает с ОЗУ процессора. После того, как весь массив передался, устройство ПДП снимает сигнал запроса ПДП, процессор далее продолжает свою нормальную работу.
Методы адресации
1. Регистровый
incR3 – содержимое регистра R3 увеличивается на единицу.
2. Косвенно-регистровый
inc@R3, inc(R3) – содержимое ячейки памяти с адресом R3 увеличивается на единицу.
3. Автоинкрементная адресация
Inc(R3)+ - увеличение адреса на два после выполнения операции (постинкрементная адресация).
4. Автодекрементная адресация
inc-(R3) – содержимое регистра R3 уменьшается на два, а в нем находится адрес операнда, по адресу операнда содержимое увеличивается на единицу.
5. Косвенно-автоинкрементная адресация
clr@(R3+) - в регистре R3 находится адрес адреса той ячейки памяти, где записан операнд.
6. Косвенно-автодекрементная адресация
clr@-(R3) - содержимое регистра R3 уменьшается на два, в этом регистре находится адрес адреса той ячейки памяти, содержимое которой надо стереть.
7. Индексная адресация.
inc200(R0) – вместо 200 может стоять и символ, но его необходимо определить выше для макроасемблера.
8. Косвенно-индексная адресация
inc@200(R0)
Частный случай: методы адресации через счетчик команд.
1. Непосредственная адресация
mov #600, R4 – константа 600 заносится в R4.
2. Абсолютная адресация
mov #200, @#177564 – константа 200 заносится по адресу 177564 (это внешнее устройство).
3. Относительная адресация
clr1000 – очисть тысячную ячейку. В код команды заносится содержание счетчика команд и этой константы (результат смещения относительно счетчика команд).
4. Косвенно-относительная адресация
clr@1000 - в результате сложения счетчика команд и этой константы определяется адрес операнда.
Еще есть особый регистр R6 – указатель стека. Запись в стек производится аппаратно с автоинкрементной адресацией. Выборка происходит по автодекрементному методу (причем с преддекрементной адресацией).
Системы команд бывают:
1. Безадресные
2. Одноадресные
3. Двухадресные
PSW – слово состояния процессора (ССП). ССП меняется после выполнения текущей команды.
| T | N | Z | V | C | ||
С – перенос (для определения переполнения).
V – арифметическое переполнение.
Z – если результат операции нулевой.
 N – знак операции (знак результата): 0 – «+»
N – знак операции (знак результата): 0 – «+»
1 – «-»
T – трассировка программы.
Есть разряд запрещения всех внешних прерываний (в этом же регистре).
0 – разрешение
1 – запрещение
Начальное состояние регистра при запуске «0».
Работа с внешним устройством
На примере клавиатуры и монитора. Клавиатура + монитор = терминал.
RSPM – регистр состояния приемника. RSPM = 177560.
RDPM – регистр данных в приемнике. RDPM =177562.
RSPD – регистр состояния передатчика. RSPD = 177564.
RDPD – регистр данных передатчика. RDPD = 177566.
Пример программы: buf:
mov #buf, R0
mov #80., R1 – счетчик 80.-десятичный.

 add1:
add1:
TSTB @#RSPM
 BPL add1 – переход, если плюс (если седьмой разряд «0», то переход).
BPL add1 – переход, если плюс (если седьмой разряд «0», то переход).
mov @#RDPM, (R0)+
Sob R1, add1 – вычитание единицы, проверка на ноль.
Робот НЦТМ – 01
У микроЭВМ доступна системная шина, куда можно подключать дополнительные устройства. У микроконтроллера системная шина недоступна пользователю.
Назначение робота: для обслуживания металлорежущих токарных станков, для загрузки, разгрузки деталей типа «тела вращения» диаметром до 150 мм и высотой до 150мм.
Эксплуатационные характеристики робота:
- Четыре степени подвижности, из них три - декартовы (X, Y, Z) и одно – фиксированный поворот но 90°.
- Приводы: электромеханические с двигателем постоянного тока и импульсными датчиками, кроме степени поворота.
- Два схвата на кисти. Один схват для заготовки, другой схват для детали. У схватов исполнительные пневматические приводы для перемены схватов и для сжатия-разжатия.
- Система управления: на базе микроЭВМ «Электроника – 60».
- Точность позиционирования в декартовой системе координат (X, Y, Z) +0.5 мм.
- Перемещение: по оси X – до 300 мм
по оси Y – до 300 мм
по оси Z – до 160 мм
- Скорости перемещения (средние технологические):
по оси X – 50 мм/с
по оси Y – 100 мм/с
по оси Z – 50 мм/с
- Время непрерывной работы в автоматическом режиме – до 50 часов.
- Наработка на отказ – 300 часов.
- Средний срок службы – до 5 лет.
- Способ управления – позиционно-цикловой. Изначально программное обеспечение было предназначено для раздельного управления каждой степенью.
- Штатное программное обеспечение. По ориентированию на стандартный цикл, манипулирование деталями; вводятся пользователем переменные данные, характеризующие новую партию детали (тип кассеты, позиция детали в кассете, тип детали, тип станка с ЧПУ).
Кинематическая схема робота НЦТМ – 01
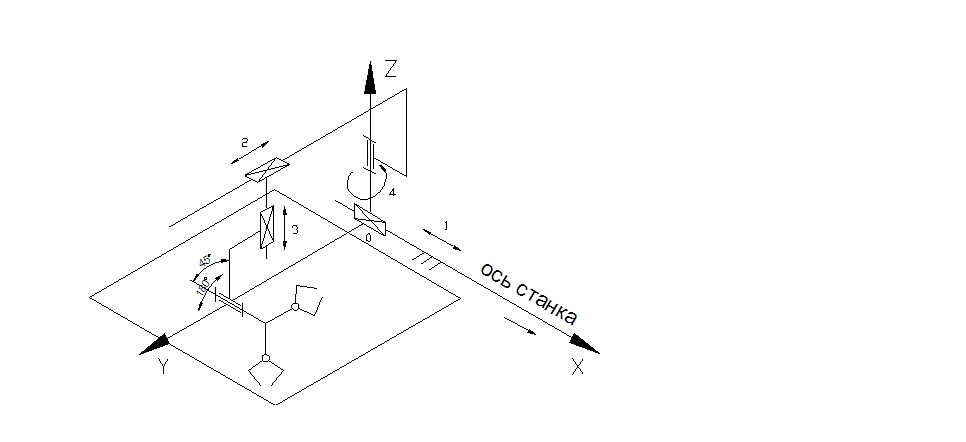
Размещение робота на передней бабке станка.
Ось станка – ось патрона, параллельная оси X
1 – перемещение по оси X.
4 – поворот ровно на 90° либо к оси станка, либо к кассете.
2 – перемещение по оси Y.
3 – подъем/опускание по оси Z.
Схваты с ротацией - 180°.
Ротация схватов на 180° происходит вокруг оси, расположенной под углом 45° к вертикальной оси Z в плоскости, параллельной плоскости YOZ. При повороте на 180° схваты меняются местами.
Механизмы перемещения
Степень 1 – горизонтальное перемещение вдоль оси X (перемещение основания). Приводы: два ДПТ типа ДПМ-30. Они работают параллельно на одну шестеренку.
Датчики:
1.Импульсный датчик пути. Шаг: 0,4 мм на импульс. Принцип действия: пара фотосветодиодов.
2.Датчик начального положения.
3.Датчик конечного положения.
Передача: зубчатая цилиндрическая + шарико-винтовая (ШВП).
Торможение: динамическое и статическое. Статическое – с помощью фрикционной муфты. Динамическое – замыкание обмотки на сериесное сопротивление. Сериесное сопротивление необходимо для того, чтобы ограничить ток торможения.
Привод имеет два уровня скорости: быстрый и медленный, два уровня напряжения. Привод позиционный, неследящий.
Степень 2 – горизонтальное перемещение вдоль оси Y (аналогично степени 1).
Степень 3 – вертикальное перемещение вдоль оси Z. Приводы: два ДПТ типа ДПМ-35.
Датчики:
1.Датчик начального положения (концевой датчик).
2.Датчик пути.
Степень 4 – механизм поворота. Привод: ДПТ типа ДПМ-25.
Датчики:
1.Датчик начального положения.
2.Датчик конечного положения.
Передача: коническая зубчатая + передача «Мальтийский крест».
Торможение: динамическое и статическое. Статическое-выдвижной фиксатор (один уровень скорости).
Степень 5 – перемена (ротация) схватов.
Привод: пневмоцилиндр с пневмораспределителем.
Схема этого устройства
Скорость регулируется дросселем – вручную.
Передача: зубчатая рейка-шестерня.
Датчики:
1.Датчик начального положения.
2.Датчик конечного положения.
Степень 6 – сжатие схвата. Одинаково для любого из двух схватов. Исполнительный орган – пневмоцилиндр с пневмораспределителем.
Передача: рейка-шестерня + червячная передача.
Датчики:
1.Датчик на захвате детали.
2.Датчик на захвате заготовки.
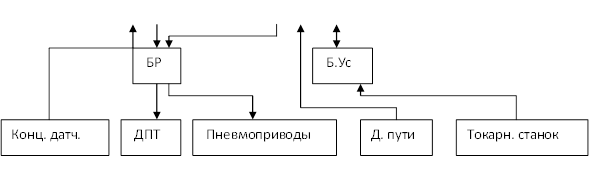
Функциональная схема устройства управления
УУ
 ЦП
ЦП
«Электроника-60»


 |  |
Для данной задачи вполне достаточно иметь жесткий таймер на 50 Гц.
ОЗУ – системное ОЗУ. Там же еще есть системное ПЗУ. У данных процессоров два типа памяти: системная и пользователя. Здесь системное ОЗУ – 4 килослова.
ПЗУ – 4 килослова.
УПО – устройство последовательного обмена – для связи с дисплеем.
УПВВ – устройство параллельного ввода/вывода. Каждое из двух УПВВ имеет 16 входов и 16 выходов.
БР – блок реле. С БР сигнал поступает на ДПТ и привод.
Датчики:
1.Концевые датчики.
2.Датчики пути.
Согласование с ТТЛ.
Б.Ус – блок усилителей. Служит для связи с токарным станком. 24В, до 20 Вт.
Команды управления роботом и станком
Все управление осуществляется через устройство параллельного ввода/вывода.
Регистр вывода: 167772.
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
Разряды регистра:
0 – перемещение влево вдоль оси X
1 – перемещение вправо вдоль оси X.
2 – скорость по оси X: 1 – медленно
0 – быстро
4 – перемещение назад вдоль оси Y.
5 – перемещение вперед вдоль оси Y.
6 – скорость по оси Y.
12 – схват детали закрыть.
13 – схват детали открыть.
14 – схват заготовки закрыть.
15 – схват заготовки открыть.
Регистр вывода:
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
Разряды регистра:
0 – поворот нулевой к станку.
1 – поворот к кассете.
2 – ротация схвата (Ед), т.е. деталь перевести в горизонтальное положение.
3 – Ез, т.е. перевести заготовку в горизонтальное положение.
5 – перемещение вниз вдоль оси Z.
6 – перемещение вверх вдоль оси Z.
7 – скорость по оси Z.
9 – разжать деталь в патроне станка.
10 – зажать деталь в патроне станка.
11 – пуск программы ЧПУ станка.
12 – пуск шпинделя станка.
13 – ответ станка (запрос к станку).
Регистры ввода сигнала (от оборудования).
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
Разряды регистра:
0 – схват детали закрыт (срабатывает концевой датчик).
1 – схват детали открыт.
2 – схват заготовки закрыт.
3 – схват заготовки открыт.
4 – сигнал ротации схвата ез (заготовка в горизонтальном положении).
5 – сигнал ротации схвата ед (деталь в горизонтальном положении).
6 – концевой датчик Zвв (вверх).
7 – стоп у станка (вс).
8 – стоп у кассеты (вк).
9 – Yвп (степень выдвинута).
10 – Yнз (степень втянута).
11 – Xвл (степень влево).
12 – Xвп (степень вправо).
Регистр ввода: 167764
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
Разряды регистра:
0 – патрон станка разжат.
1 – патрон станка зажат.
3,4,5 – крыльчатки (X*,Y*,Z*).
6 – конец обработки на станке.
Пример:
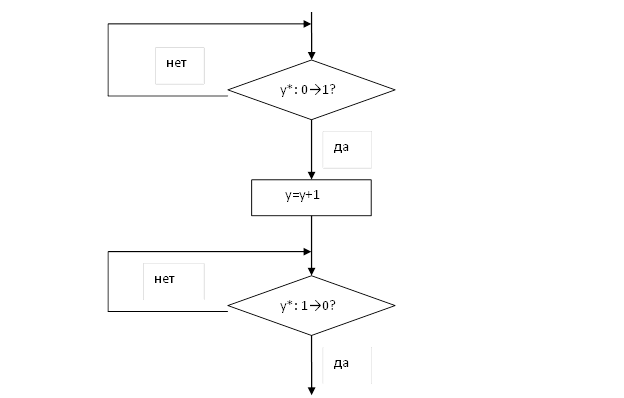
Управление по одной степени. Для примера возьмем степень Y. Шаг: 0,4 мм на импульс. Перемещение в миллиметрах надо пересчитать в импульсы. Введем следующие обозначения: y=0 – текущее смещение по оси Y. S=0 – флаг (1 бит) – признак торможения. Если S=1, то степень находится в режиме торможения. ∆y – заданное число импульсов по оси Y с учетом хода после торможения (с коррекцией). ∆y1 – без коррекции. Таймер необходим для фиксации времени окончательного торможения.
Алгоритм.
Процедура А.
 Позиционные системы управления
Позиционные системы управления
В позиционных системах управления каждая степень имеет большое количество точек позиционирования. Гарантируется попадание в заданную точку и перемещение с необходимой скоростью. Траектория схвата от точки к точке схвата не обеспечивается. Привод может строиться с помощью следящих приводов и разомкнутых систем на базе шагового двигателя. Конструкция шагового двигателя определяет количество точек позиционирования. Датчики обратной связи обычно не используются. Необходимо иметь концевые датчики на крайнее положение каждого звена – как минимум, один концевой датчик. Концевые датчики нужны для определения начального положения (провести калибровку каждой степени) и аварийный выход на упор. Пара датчиков нужна для определения исправности привода (количество шагов двигателя между двумя крайними положениями должно соответствовать заданному). Для обеспечения динамических характеристик необходимо обеспечить режим «разгон-торможение». Теоретически необходимо обеспечить закон трапеции для скорости.
Позиционная система на базе следящих приводов
Обычно используются бесколлекторные двигатели. Теоретически могут использоваться аналоговые датчики (потенциометры, тахогенераторы и другие). Потенциометры в современных системах используются только в режиме калибровки, если теряется информация о текущем положении при включении питания. Иногда используются тахогенераторы. Обычно они работают совместно с кодовыми датчиками. Кодовые датчики ставятся на выходном валу (в шарнире звена) и дают положение звена в полном диапазоне его перемещений. Выходной сигнал в виде кода. Позиционные датчики дают положение в виде бинарного кода (обычно это код Грея).
Достоинство: знание абсолютного положения.
Недостаток: при тех же технологических возможностях изготовления более низкая точность.
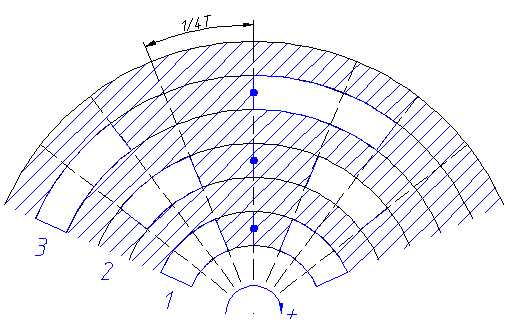
Фотоимпульсные датчики ставятся на валу двигателя. Далее – механическая передача. Эти датчики имеют минимум две дорожки. Самый простой датчик имеет одну дорожку.
Недостаток: нельзя определить направление движения (знак скорости).
Используются двухдорожные датчики: окошечки сдвинуты друг относительно друга на четверть периода. Тогда при вращении можно определить направление перемещения.
Достоинства: простота, дешевизна, меньшие габариты. Можно получить код скорости без использования отдельного датчика скорости. Можно получить высокую точность с относительно небольшим количеством импульсов датчика.
Недостаток: информация об абсолютном положении звена теряется при отключении питания. Поэтому требуется обязательно производить калибровку каждого звена для определения его положения. При калибровке чаще всего используют потенциометр, который дает грубое положение. А точное положение дает импульсный датчик. «Суммируем» грубое и точное положение и получаем результат.
Законы управления по каждой степени подвижности.
Обеспечение трапециидального закона по скорости.
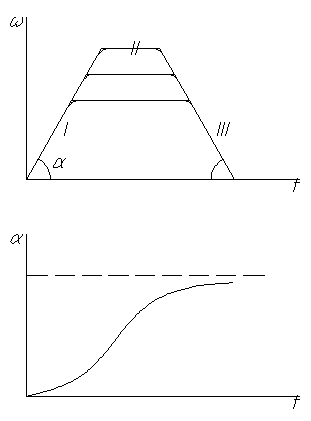
I- разгон
II- движение с V=const
III- торможение.
Угол a ограничен моментом (током). Сглаживают, чтобы не было бросков по току (не было дерганий).
В системах управления обычно предусмотрены 2 режима:
- с проверкой попадания в заданную точку
- без проверки.
Для многих операций нужна плавная траектория, тогда используется управление без проверки.
Траектория более плавная, углы сглаживаются, движение более равномерное. При увеличении скорости сглаживание углов будет более существенное.
Момент перехода к следующей точке определяется программой (обычно в процентном соотношении от пройденного пути).
Промышленный робот PM01.
Назначение: сборка 3D, пайка (пространственная), механообработка, сварка(дуговая, точечная), окраска, склеивание, транспортировка.
Характеристики:
- Номинальная грузоподъемность- 2.5 кг
- Max грузоподъемность- 6 кг
(ограничивается настройками по току якоря двигателя)
- Погрешность позиционирования- 0.1 (0.2)мм
- Точность повторяемости-0.015 мм
(зависит от конфигурации руки)
- Max линейная скорость перемещения - 500мм/с
(линейная скорость с сохранением ориентации схвата)
Для позиционного режима и движения по обобщенным координатам величина скорости будет означать масштабный коэффициент.
- Число одновременно управляемых степеней - 6
- Устройство управления: многопроцессорное- 7 процессоров: один на верхнем уровне управления и 6 приводных процессоров. Конструктивно можно добавить еще два процессора (процессор СТЗ, тактильный, сило-моментный). Рукоятка типа джойстика.
- Способ управления: контурно-позиционный.
- Способ программирования: аналитический с обучением. Программа на языке ARPS в виде текста. Используемые в программе положения задаются в режиме обучения.
Может работать в трех координатных системах:
· World-неподвижная декартовая система, связанная с основанием робота
· Tool-подвижная декартовая система, связанная с фланцем кисти
· Joint-обобщенная система координат
- Приводы: электромеханический с ДПТ с независимым возбуждением от постоянных магнитов. 1-3 степени по 150 Вт, 3-6 степени по 50 Вт.
- Датчики обратной связи: оптические фотоимпульсные двух номиналов - 220 и 250 им/об.
- Датчик положения: потенциометр в следящем режиме не используется, нужен только для калибровки.
- Число каналов связи с ТО (дискретные)-32 входа, 32 выхода.
- Вес- 52 кг
Срок службы- 10 лет
Наработка на отказ-500 ч
- Способы крепления - на полу, на потолке, на стене.
Кинематическая схема.
1-ая степень: вращение колонны, диапазон 3200
2-ая степень: качание плеча, диапазон 2700
3-ья степень: качание локтя, диапазон 2700
4, 5 и 6 степени образуют сферический шарнир, это узел-кисть.
4-ая степень: вращение кисти, диапазон 2800
5-ая степень: качание кисти, диапазон 2000
6-ая степень: вращение фланца кисти, диапазон 5320
Система координат: неподвижная система, связанная с основанием, поднятая на высоту.
У руки есть разные конфигурации:
-правая
-левая
-локоть вверх
-локоть вниз
-кисть вверх
-кисть вниз
Все движения робота должны быть плавными.
Особенности конструкции.
Конструкция монококовая. Еще есть стержневая (силовая).
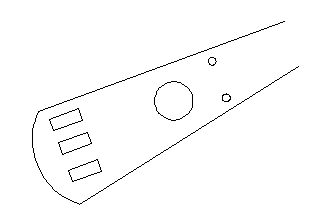
Достоинство: конструкция жесткая, легкая, прочная.
Силовые модули
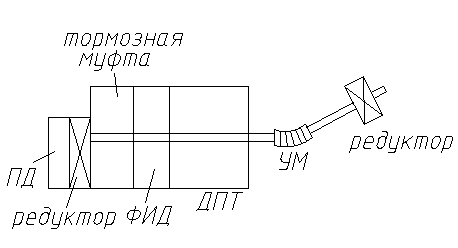
ПД - потенциометрический датчик
УМ - упругая муфта
Такая конструкция используется для кисти: 4,5 и 6 степени. Для 1-3 степени нет упругой муфты, а остальное - тоже самое. Для них мощность 150 Вт, для 4-6 степени по 50 Вт. ФИД может иметь либо 200, либо 250 дискрет на оборот.
Тормозная муфта, ФИД, ДПТ находятся на валу двигателя. ПД имеет редуктор (обычный пленочный ПД), в режиме слежения привода не используется, он необходим только для режима калибровки.
Муфта обычная, фрикционная. Нельзя перемещать робот руками, если муфты заторможены.
У ФИД есть оптический диск, Металлическим напылением нанесены дорожки (3 шт.) в виде прозрачных окошек. 1и 2 информационное, 3- один импульс на один оборот -индексная, необходима для калибровки робота. Информационные дорожки смещены на четверть периода. Это нужно для определения направления вращения.
ДПТ - коллекторный, возбуждение от постоянных магнитов, высокомоментный и низкооборотный. Передаточное отношение около 100, этого достаточно. Редукторы цилиндрические прямозубые (бывают конические), сделаны по высокому классу точности, полированы. У любого редуктора предусмотрено выбирание люфта. Для этого на поверхность выведено 3 люфта. Если передача плохая, то никак люфт не убрать. А вообще - уменьшают межосевое расстояние. Для этого одна из шестеренок фиксируется эксцентриком. Есть 3 отверстия:1-ое растормаживает эксцентрик, а другие два толкают эксцентрик то в одну, то в другую сторону. Необходимо сдвигать оси до тех пор, пока не начнется заедание, а потом чуть ослабить. Практически можно считать, что люфта нет, его не надо учитывать при расчете.
Упругая муфта служит для передачи направления вращения. Муфта состоит из цилиндра, она должна быть жесткой на кручение и мягкой на изгиб, очень долговечная.
Устройство управления Сфера – 36
У Сферы – 36 есть передняя и задняя панели. Система управления запрограммирована в ПЗУ, нет дополнительных носителей, нет операционной системы.
ВТУ – видеотерминальное устройство (монитор + клавиатура).
Блок модулей: процессорный блок. 7 модулей процессора.
Блок питания – блок вторичного питания. Первичное питание – 220 В.
Двигатели управляются с помощью широтно-импульсного преобразования (ШИП).








Блок развязки фильтрации – стабилизирует первичное (220 В) напряжение.
БПП – блок питания привода.
БВВ – блоки ввода/вывода.
Устройство Сферы – 36: накопитель на гибких магнитных дисках, терминал, канал ВУ (внешние устройства), пульт управления.
БВВ обеспечивают гальваническую развязку с внешними сигналами.
Панель управления:

где
СУ – система управления
ПРИВ – питание приводов
ВУ – внешние устройства
ПРУ – пульт ручного управления
Устройство верхнего уровня управления
МЦП – модуль центрального процессора (в блоке модулей).
ОЗУ – две штуки.
ПЗУ – постоянное запоминающее устройство.
Модуль последовательного интерфейса (четыре канала):
1.Терминал
2.Накопитель на гибких магнитных дисках
3.Пульт ручного управления
4.ВТУ
Модуль ввода/вывода (МВВ) – обеспечивает связь между дискретными входами и выходами.
Модуль аналогового ввода/вывода (МАВ) – предназначен для оцифровки сигнала с потенциометра. Используется только в режиме калибровки (т.к. потенциометр используется только для калибровки).
Модуль связи (МС) – обеспечивает обмен между двумя уровнями. На Q-шине может быть только одно активное устройство. МС обеспечивает связь между различными Q-шинами.
МПИ – модуль последовательного интерфейса.
МВВ – 32 входа и 32 выхода (дискретные).
Привод:
МПП – модуль процессора привода. Программа управления в ПЗУ.
МУП – модуль управления приводом.
ШИП – мостовой усилитель мощности (здесь). А настоящее ШИП (широтно-импульсное преобразование) происходит в МУП. Каждая степень управления приводом содержит процессор привода и МУП.
Задачи: решаются на разных уровнях управления.
Всего два уровня управления:
1.Центральный уровень управления.
ARPS (АРПС) – язык управления. Интерфейс с оператором.
Решение прямой и обратной кинематических задач (обобщенные координаты: q, декартовы координаты). Обеспечение интерфейса с внешней ЭВМ. Работа с технологическим оборудованием. Загрузка и исполнение программ пользователя. В промышленной системе нельзя использовать винчестер в качестве операционной системы.
НГМД – хранение программ пользователя.
Режим калибровки: считается количество импульсов за один оборот. Потенциометр обеспечивает грубый отсчет. Для калибровки роторов используется специальная калибровочная таблица. Потенциометр с этой таблицей дает грубое положение. Точное положение фиксируется от индексного импульса.
2.Нижний уровень управления.
Задачи этого уровня: управление приводом, регулировка параметров движения (скорость, положение). В данном случае настраивается цифровая часть привода. Диагностика работоспособности привода. Информационный обмен с верхним уровнем управления. Обмен происходит в режиме прерывания. Необходимо обеспечить ПДП. Обмен сигналами на верхнем уровне происходит с периодом 10 – 20 мс. На нижнем – 2 мс. Нижний уровень – работа в прерываниях. Управление непрерывное. Центральный процессор имеет четыре разряда. Всего можно обеспечить 1 – 2 мс.
Приводной процессор (4 разряда) – 0,2 – 1 мс.
Модуль аналогового ввода/вывода – сигнал до 5 В.
АЦП имеет 12 разрядов.
Схема привода:
Широтно-импульсный сигнал подается на систему управления приводом.
Напряжение: 24 В
Ток до 2 А.
Модуль связи – предназначен для организации обмена между центральным процессором и приводами. Работает в режиме ПДП. Центральный процессор всегда ведущий.
В состав МУП входят: ОЗУ, ПЗУ, сам процессор и отдельные регистры.
Датчики: ФИД – фотоимпульсный датчик для управления приводам, ПД – потенциометрический датчик для калибровки.
Модуль связи – на линии только одно активное устройство – шина Q. В данном модуле указывается, к какому регистру мы адресуемся и что нужно делать.
Регистр состояния (176400):
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
| 1 | 0 | ||||||||||||||
Разряды регистра:
6 – разрешение прерывания для ПДП.
7 – готовность ПДП, флаг.
8 – 10 – номер процессора привода.
Регистр прерываний:
| 15 8 7 0 | |
|
|
|
0 – 7 – маска прерывания.
Страничная организация памяти:
| 15 8 7 0 | |
|
|
|
Младшая часть – адрес на странице. Старшая часть – номер страницы.
Процедура обращения:
Необходимо указать номер страницы и адрес на странице. Например, нужно обратиться к пятому приводу: мы устанавливаем номер привода в регистр обращения к приводу. Идет запрос на прерывание данного привода. Происходит обмен данными между ячейкой памяти привода и центральным процессором. Обращение происходит один раз. Режим ПДП сбрасывается аппаратно, т.е. только к одной ячейке памяти.
| 15 | 14 13 12 | 11 10 9 | 8 7 6 | 5 4 3 | 2 1 0 | ||||||||||
| 1 |
| 1 | 1 | ||||||||||||
20001: 11111101
Модуль связи сбрасывается после первого обращение аппаратно. Обращение к памяти процессора привода происходит в режиме ПДП через модуль связи. Устанавливается модуль обращения привода, номер на странице памяти привода и адрес на странице. Обмен происходит в режиме ПДП.
Кинематическая схема робота PUMA.
У робота 6 степеней, нумерация степеней относительно основания.
Звено 1-колонна (диапазон 3200)
Звено 2-плечо (диапазон 2700)
Звено 3- локоть (диапазон 2700)
Кистевой узел - сферический шарнир, там 3 степени.
Ст.4- вращение кисти (2800)
Ст.5- качание кисти (2000)
Ст.6- вращение фланца кисти (5200)
У робота три системы координат: joint, world, tool. Конфигурация руки может быть левой и правой.
Устройство управления «Сфера-36».
Структурная схема устройства управления.
МЦП - модуль центрального процессора
Таймер - программируемый.
Нижний уровень для приводов.
Верхний- для ЦП.
Есть три магистрали М1, М2, М3 типа Q-шина.
На приводном уровне: 6 приводных модулей.
Преобразователь Код-ШИМ в модуле управления приводом.
ШИМ- усилитель по мостовой схеме.
Программное обеспечение.
Просто ПЗУ. Нет операционной системы. То, что управляет приводом, прошито в ПЗУ каждого привода. Для ЦП- прошито в ПЗУ ЦП. Есть язык управления (ARPS). Пользователь составляет программу на языке пользователя (ARPS), а работать может на языке команд монитора. Программирование: аналитически - обучаемое.
RECB
10 IF INGROUP RSPM2<128 THEN JUMP 10
SET BYTE.=INGROUP RDPM2.AND BYTE MASK
RETURN
SET RSPM2.=-152 (177550)
SET RSPM2.=-150 (155552)
SET BYTE.MASK=256
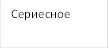
Привод. Функциональная схема следящего привода.
Имеет три канала.
Управляющий канал: КОД-ШИМ. Две обратные связи по положению и по скорости. Показания потенциометра в режиме калибровки.
Модуль процессора привода с частотой, задаваемой таймером процессора привода, получает информацию из МУП: информацию о приращении позиции привода и временном интервале между двумя соседними позиционными импульсами. Далее решается задача управления и на двигатель выдается код управления. Период выдачи сигнала от процессора привода- 2мс. ЦП выдает новую уставку (обменивается с приводным) через 20 мс. Можно считать, что привод непрерывный, т. к. высокая частота. Фотоимпульсный датчик: 3 датчика.
Технология изготовления: стекло, непрозрачные участки серебрят. Прозрачные участки смещены на ¼ периода. 2-ая и 3-ья- сигнальные дорожки, 1-ая- индексная дорожка.
Индексный импульс- 1 импульс на один оборот диска.
Информационный импульс- 200-250 импульсов на 1 оборот. Сдвинуты между собой на ¼ периода - для определения направления движения (по сдвигу фаз). Направление вращения определяется аппаратно с помощью специальных микросхем.
Точки - оптические датчики, работающие на просвет (светофотодиод). Они определяют, прозрачный участок или нет.
Временная диаграмма датчика:
непрозрачный участок-«1».
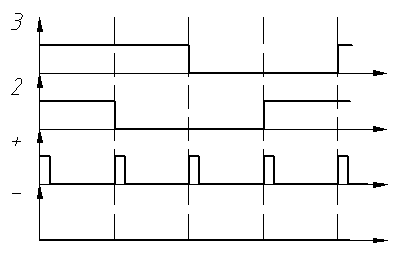
Есть формирователь импульсов, он делает короткие импульсы. У него 2 выхода: положительный и отрицательный. Он выдает короткие импульсы либо по положительному выходу, либо по отрицательному.
Модуль управления приводом.
Имеет 4 регистра.
Регистр приращения позиций:
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| код приращения позиций (дополнительный код) |
Представление отрицательных чисел в машине в виде дополнительного кода: инвертируем положительное число и добавляем единицу.
Пример: -1
В этом дополнительном коде либо положительная, либо отрицательная величина.
8р-сигнал переполнения интервала
9р - перегрузка по току
8р и 9р сбрасываются аппаратно после чтения.
15р - индекс
175000-восьмеричный адрес регистра позиций. Доступен только для чтения.
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| код длительности интервала (прямой код) |
Остальные разряды не используются.
Регистр управления:
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| знак кода | код управления (прямой код) |
Знак задает, какой полумост будет включен, а код определяет скважность.
Скважность: ширина импульса/ на эффективность.Max скважность=1
Регистр
| 1 | 0 | ||||||||||||||
0р-разряд калибровки
1р-режим активных ключей
Режим калибровки (в рабочем режиме 0). Режим активных ключей (если 0, то работать не будет). Это нужно для аварийной остановки. Перегрузка - в МУП есть потенциометр, который задает уровень тока в якоре двигателя (допустимый). Для этого существует токоограничение.
Каналы:
1. Канал управления.
В регистр управления необходимо прописать прямой код+знак. На преобразователь поступает данный код со знаком. С ГИ на код-ШИМ импульсы поступают:
Этот сигнал поступает с регистра на КОД-ШИМ, затем на узел токоограничения. Там есть сигнал «активные ключи». В нормальном рабочем режиме этот сигнал должен быть. После сигнал поступает на двигатель по мостовой схеме (выбирается знаком полумост). В УМ характеристики транзисторных ключей не линейны в мостовой схеме управления двигателем. Это сделано для того, чтобы обеспечить нормальное торможение при прохождении через нуль скорости.
2. Канал обратной связи по положению.
С фотоимпульсного датчика поступают два сигнала по 2-ой и 3-ей дорожке на формирователь позиций импульсов. Датчик дает приращение позиций. Далее на датчике приращения позиций (8-р реверсивный счетчик). Счетные сигналы поступают на «+» и на «-». Далее сигнал поступает в регистр приращения позиций.
В режиме калибровки мы отслеживаем индексный импульс. Код положения сбрасывался при прохождении индексного импульса.
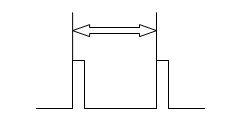
3. Канал обратной связи по скорости.
Окошки сдвинуты на 1/4 периода. Сигналы идут на датчик длительности интервала (ДДИ). ДДИ – восьмиразрядный нереверсивный счетчик. На этот датчик поступают импульсы с генератора импульсов. Далее сигнал с ДДИ поступает на схему ИЛИ.
Скорость можно измерить:
Информация в лекции "28 Субъект социально-гуманитарного познания" поможет Вам.
1.Подсчитать количество импульсов за заданный интервал времени.
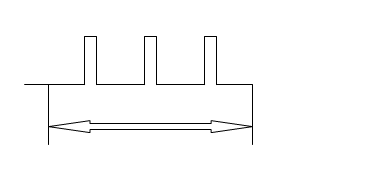
2.Подсчитать временной интервал между двумя соседними позиционными импульсами.
Чем больше импульсов, тем меньше скорость. Скорость может быть маленькой, следовательно может быть переполнение счетчика. Это бит, который будет в регистре. Если произошло переполнение (больше 256 импульсов), счетчик сбрасывается в ноль и снова начинает подсчитывать количество импульсов. В итоге время будет определяться как 256 + то количество импульсов, которое было подсчитано после переполнения. Скорость – обратная величина времени, умноженная на коэффициент. Если переполнение произошло два раза, то считается, что скорость нулевая.
Далее полученный сигнал переписывается в регистр длительности интервалов. Затем датчик длительности импульсов снова производит подсчет.




















