
Качающиеся конвейеры
ЛеКЦИЯ 18. Качающиеся конвейеры
План лекции
18.1. Общие сведения о качающихся конвейерах.
18.2. Динамические режимы работы качающихся конвейеров.
18.3. Конструкции качающихся конвейеров.
18.4. Элементы и параметры качающихся конвейеров.
18.5. Расчет качающихся конвейеров.
Качающимся называется конвейер, представляющий собой подвешенный или опирающийся на неподвижную раму желоб (трубу), который совершает колебательные движения для перемещения груза, находящегося в желобе (трубе).
Рекомендуемые материалы
18.1. Общие сведения о качающихся конвейерах
Качающийся конвейер, в котором перемещение груза осуществляется силами инерции без отрыва его от желоба, так как вертикальная составляющая ускорения желоба меньше ускорения свободного падения, называется инерционным. В этих конвейерах амплитуда колебаний желоба составляет 10...150 мм, а частота – 0,67...6,67 колебаний в секунду.
Качающийся конвейер, в котором перемещение груза осуществляется микробросками с отрывом части груза от желоба, так как вертикальная составляющая ускорения желоба больше ускорения свободного падения, называется вибрационным. В этих конвейерах амплитуда колебаний не превышает 0,5...15 мм, а частота – более 7,5...50 колебаний в секунду.
Преимущества качающихся конвейеров:
– сравнительная простота конструкции;
– возможность полной герметизации;
– выполнение технологических операций при перемещении груза (сушка, грохочение, охлаждение);
– сравнительно небольшой расход энергии.
Недостатки:
– значительное снижение производительности с ростом угла наклона;
– невозможность перемещения липких грузов;
– уменьшение скорости перемещения и производительности при перемещении пылевидных грузов;
– передача вибрационных нагрузок на опорные конструкции и фундаменты;
– сравнительно невысокий срок службы упругих элементов и подшипников.
Наиболее перспективными являются вибрационные конвейеры, в которых груз не крошится, не пылит и почти не вызывает изнашивания желоба. Применение инерционных конвейеров ограничено из-за повышенного износа желоба, вызываемого постоянным трением груза о его стенки, высоких динамических нагрузок и неуравновешенности машины. Из инерционных чаще применяются конвейеры с переменным давлением груза на дно желоба.
Областью применения качающихся конвейеров является герметичное транспортирование пылящих, горячих, химически агрессивных насыпных грузов. Эти конвейеры не могут транспортировать липкие грузы и плохо транспортируют тонкодисперсные пылевидные грузы (например, цемент).
18.2. Динамические режимы работы качающихся конвейеров
Имеется плоскость, наклоненная под углом α к горизонту и получающая от внешнего источника энергии колебательное движение с ускорением Jж, направленное под углом β (рис. 18.1).
Тогда частица груза, лежащая на плоскости, будет перемещаться вдоль нее.
Нормальное давление частицы груза на плоскость
 ,
,
где m – масса частицы груза; jy – составляющая ускорения Jж по оси y,  .
.
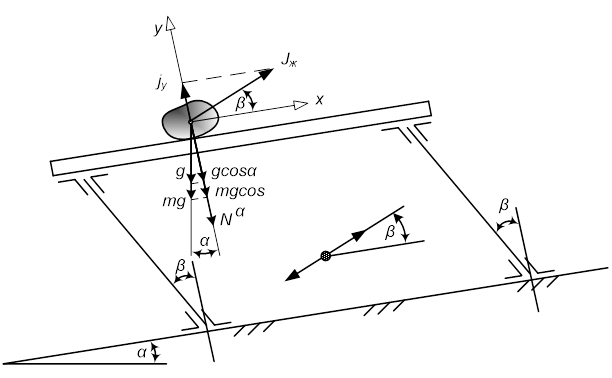
Рис. 18.1. Схема к динамическому режиму работы качающихся конвейеров
Ускорение колебательного движения
 ,
,
где а – амплитуда колебаний плоскости, м; ω – угловая скорость возбудителя колебаний, рад/с;  – фазовый угол колебаний; t – время колебания, с.
– фазовый угол колебаний; t – время колебания, с.
Тогда составляющая ускорения
 .
.
Сила давления груза на плоскость в этом случае
 .
.
По соотношению между величинами в последней формуле можно судить о направлении силы давления груза на плоскость.
Если  , то сила давления направлена вниз, и груз постоянно находится на плоскости (дне желоба); если
, то сила давления направлена вниз, и груз постоянно находится на плоскости (дне желоба); если  , то сила давления направлена вверх, и груз стремится оторваться от плоскости.
, то сила давления направлена вверх, и груз стремится оторваться от плоскости.
 имеет максимальное значение при значении угла в 90о. Этому условию отвечает максимальная нормальная составляющая ускорения желоба
имеет максимальное значение при значении угла в 90о. Этому условию отвечает максимальная нормальная составляющая ускорения желоба
 .
.
Отношение двух нормальных составляющих называется коэффициентом режима работы качающегося конвейера:
 .
.
Если конвейер горизонтальный
 .
.
Коэффициент Г характеризует динамический режим работы качающегося конвейера (динамические нагрузки на привод и другие элементы) и характер движения частиц груза.
1. Если Г < 1, груз лежит на колеблющейся плоскости и перемещается, не отрываясь от нее. Это режим инерционных конвейеров.
2. Если Г > 1, груз отрывается от колеблющейся плоскости и перемещается преимущественно микробросками. Это режим вибрационных конвейеров.
При Г = 1 режим движения груза будет неопределенным.
18.3. Конструкции качающихся конвейеров
18.3.1. Инерционные конвейеры
Различают инерционные конвейеры с постоянным и переменным давлением груза на дно желоба.
Конвейер с постоянным давлением груза (рис. 18.2) состоит из желоба 1, опорных катков 3 и двухкривошипного привода 2. Привод такой кинематической схемы обеспечивает прямолинейное переменно-возвратное движение желоба и перемещение вперед находящегося в нем груза.
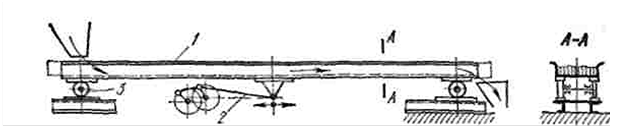
Рис. 18.2. Инерционный конвейер с постоянным давлением груза на дно желоба: 1 – желоб; 2 – двухкривошипный привод; 3 – опорный каток
Конвейер с переменным давлением груза (рис. 18.3) состоит из желоба 1, упругих стоек 4, жестко прикрепленных к желобу и опорной раме под углом β к вертикали, рамы 3 и кривошипного привода 2. При такой схеме конвейера давление груза на желоб при прямом и обратном ходе различно.
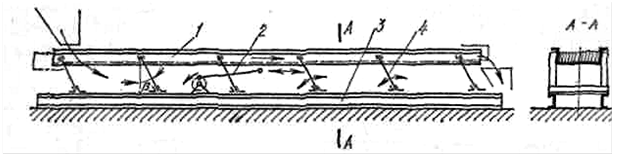
Рис. 18.3. Инерционный конвейер с переменным давлением груза
на дно желоба: 1 – желоб; 2 – кривошипный привод; 3 – рама; 4 – стойка
18.3.2. Вибрационные конвейеры
Вибрационные конвейеры различаются: по направлению перемещения груза – горизонтальные, пологонаклонные и вертикальные; по способу крепления грузонесущего элемента – на свободных упругих подвесках-амортизаторах и на наклонных направляющих стойках; по количеству одновременно колеблющихся масс – одно-, двух-, многомассные; по динамической уравновешенности – неуравновешенные и уравновешенные; по количеству грузонесущих элементов (желобов или труб) – одно- и двухэлементные; по характеристике и настройке упругой системы – с резонансной, дорезонансной или зарезонансной настройкой.
На рис. 18.4 приведены схемы основных типов вибрационных конвейеров.
Вибрационный конвейер подвесной конструкции со свободно колеблющейся одномассной системой (рис. 18.4, а) состоит из грузонесущего элемента 1 (труба или желоб), свободно подвешенного на амортизаторах 2 и получающего направленные колебания от электромеханического центробежного привода – вибратора 3, расположенного под углом β к направлению колебания (обычно β = 20...30°) ниже (сплошная линия) или выше (штриховая линия) грузонесущего элемента. В другом конструктивном варианте грузонесущий элемент может опираться на амортизаторы.
Широко применяются горизонтальные двухтрубчатые динамически уравновешенные виброконвейеры на упругих стойках (рис. 18.4, б). Когда одна труба движется вперед, другая – назад, но в обеих трубах груз всегда движется в одном (заданном) направлении. Кривошипно-шатунный механизм нагружен незначительно, так как колеблющаяся масса имеет резонансную настройку. Груз движется в сторону отклонения нижнего шарнира коромысла по отношению к вертикальной плоскости, проходящей через верхний шарнир. В однотрубном конвейере на упругих стойках (рис. 18.4, в) уравновешивающим элементом является специальная балка.
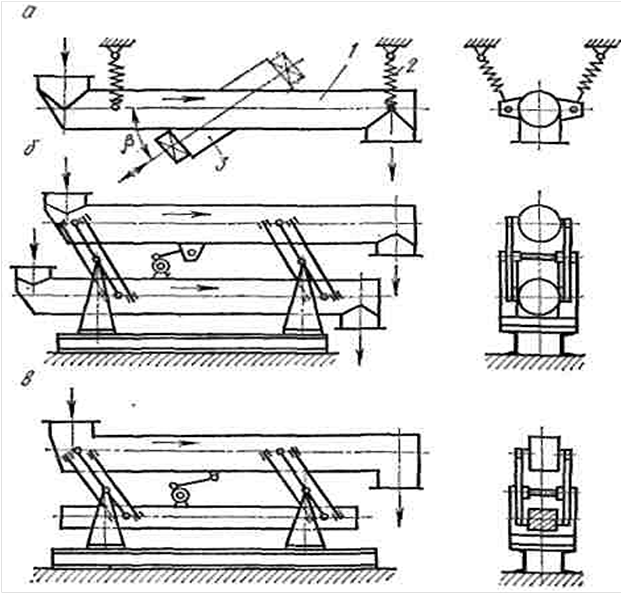
Рис. 18.4. Схемы вибрационных конвейеров: а – однотрубный на пружинных подвесках с электровибратором; б – двухтрубный на упругих стойках с эксцентриковым вибратором; в – однотрубный на упругих стойках с эксцентриковым вибратором и уравновешивающей балкой: 1 – грузонесущий элемент; 2 – амортизатор; 3 – вибратор
Для вертикальной транспортировки грузов применяются вибрационные конвейеры, в которых перемещение груза осуществляется по желобу, идущему по винтовой линии с углом подъема 5…15о высота подъема вибрационных вертикальных конвейеров до 12 м, производительность 20 т/ч и скорость транспортирования грузов 0,1…0,3 м/с.
18.4. Элементы и параметры качающихся конвейеров
Грузонесущими элементами являются стандартные трубы и желоба, которые делаются сварными (обычно прямоугольного сечения) из листовой стали толщиной 3...5 мм (или из профильного проката). Для абразивных грузов применяется износостойкая сталь.
Желоба при большой длине конвейера состоят из секций длиной 4...6 м на фланцевых болтовых соединениях. Для пылевидных грузов применяют закрытые желоба прямоугольного сечения или трубы. Ширина желоба или диаметр трубы определяется в зависимости от производительности конвейера. В типовых конструкциях подвесных виброконвейеров применяют трубы диаметром 160, 200, 320 и 400 мм. Длина подвесных виброконвейеров – до 4 м, однотрубных конвейеров опорной конструкции – до 30...35 м, двухтрубных – до 50 м. Ширина желоба инерционных конвейеров обычно 200...1200 мм.
В качестве упругих элементов (связей) применяются плоские единичные рессоры и пакеты из них, витые цилиндрические и плоские пружины, а также резинометаллические блоки. Материал рессор и пружин – сталь 55С2, 60С2, 60С2Н2А с допускаемым напряжением изгиба
[σи] = 100...110 МПа. Толщина рессорной стали б = 2...6 мм.
Скорость движения груза в инерционных конвейерах достигает 0,2 м/с, в вибрационных – до 0,25...0,3 м/с, в отдельных случаях – до 0,5 м/с.
Для возбуждения колебаний грузонесущего элемента чаще всего используются электромеханические (центробежные и эксцентриковые) и электромагнитные приводы.
Центробежные приводы подразделяются на дебалансные с маятниковым (упругошарнирным) креплением (рис. 18.5, а) и самобалансные направленного действия с двумя разделенными дебалансными мотор-вибраторами.
Дебалансный центробежный привод (рис. 18.5, а) состоит из электродвигателя 1, на валу 2 которого закреплены неуравновешенные (дебалансные) грузы 3. Двигатель установлен на опорной плите 4 с упругими шарнирами 5, через которые конвейеру передается только продольная составляющая центробежной силы Fy, при этом поперечная составляющая Fx воспринимается упругим шарниром.
Центробежные приводы применяют для подвесных и опорных конвейеров и питателей.
Эксцентриковые (кривошипно-шатунные) приводы бывают с жестким (рис. 18.5, б) и упругим (рис. 18.5, в) шатунами. Упругий (полужесткий) шатун (обычно их бывает два) имеет упругий элемент (цилиндрическую пружину или резинометаллические пакеты) с определенной жесткостью. Во время пуска конвейера шатун работает как упругий, а при установившемся движении – как жесткий. Такие приводы применяют на уравновешенных двухтрубных конвейерах, иногда – на однотрубных.
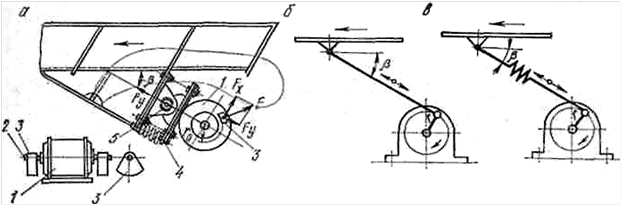
Рис. 18.5. Схема электромеханических приводов вибрационных конвейеров: а – центробежный с дебалансным маятниковым креплением; б – эксцентриковый с жестким шатуном; в – эксцентриковый с упругим шатуном; 1 – электродвигатель; 2 – вал; 3 – дебаланс; 4 – опорная плита; 5 – упругий шарнир
Угол направления колебаний β принимается в зависимости от их частоты: при частоте, большей или равной 1000 мин–1, β = 20...25°, при частоте, меньшей 1000 мин–1, β = 30...35°.
18.5. Расчет качающихся конвейеров
Производительность качающихся конвейеров, т/ч, всех типов может быть определена в зависимости от скорости транспортирования груза по формуле
 ,
,
где F – площадь сечения груза, находящегося в трубе:
 ,
,
либо F – площадь сечения груза, находящегося в прямоугольном желобе:
 ,
,
где z – число труб; d – диаметр трубы; В – ширина желоба; h – высота слоя груза (в среднем 50...100 мм): h =hбψ, hб – высота борта; ψ – коэффициент заполнения сечения ψ = 0,5...0,6 для инерционных конвейеров; ψ = 0,6...0,9 для открытых желобов; ψ = 0,6...0,8 для прямоугольных труб и ψ = 0,5...0,6 для круглых труб вибрационных конвейеров);
ρ – насыпная плотность материала, кг/м3; v – скорость движения материала, м/с.
По заданной производительности можно определить требуемую площадь сечения груза в трубе или желобе.
Необходимая мощность приводных двигателей, кВт, качающихся конвейеров определяется по следующим формулам:
а) для инерционного конвейера с постоянным давлением груза на дно желоба
 ,
,
где mк – общая масса движущихся частей конвейера, включая 0,67 массы шатуна и 0,25 массы опорных катков, кг; тг – масса груза, находящегося на конвейере, кг: mг = qгL; L – длина конвейера, м; qг – погонная масса груза, кг/м;  .
.
б) для инерционного горизонтального конвейера с переменным давлением груза на дно желоба
 ,
,
где η – кпд механизмов привода: η = 0,8...0,85; β – угол наклона упругих опорных стоек к горизонту; r – радиус кривошипа, м; nкр – частота вращения кривошипа, мин–1; fд – коэффициент трения груза по желобу.
в) для вибрационного конвейера длиной  м
м
 ;
;
длиной 
 ,
,
где kтр – коэффициент транспортабельности груза: для кусковых и зернистых грузов (песок, уголь, шлак, зерно) kтр = 1; для порошкообразных и пылевидных грузов (цемент) kтр = 1,5...2,0; Н – высота подъема груза (при наклонном транспортировании), м; η – кпд механизмов привода,
η = 0,95...0,97; k3 и k4 – коэффициенты, учитывающие удельные затраты мощности при перемещении груза массой 1 т на 1 м, зависят от конструкции и производительности конвейера.
Для расчетов качающихся конвейеров должны быть заданы производительность, характеристика транспортируемого материала, длина конвейера и угол его наклона к горизонту.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Назовите назначение и область применения качающихся конвейеров.
2 Правовая природа и соотношение дифференциации и единства уголовно-процессуальной формы - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
2. Назовите параметры, различающие инерционные и вибрационные конвейеры.
3. Что выражает коэффициент динамического режима работы качающихся конвейеров?
4. Опишите конструкцию инерционных конвейеров. В чем отличие инерционных конвейеров с постоянным давлением груза на желоб и с переменным давлением груза на желоб?
5. Назовите типы вибрационных конвейеров. Опишите принцип работы.
6. Как определяется мощность приводного устройства инерционных конвейеров?
7. Как определяется мощность приводного устройства вибрационных конвейеров?



















