
Функциональные элементы сар эпс
1. Функциональные элементы САР ЭПС: задающие, промежуточные, датчики, объекты регулирования, исполнительные и управляющие элементы.
2. Принципы регулирования, применяемые в САР ЭПС.
3. Типовые функциональные схемы САР ЭПС.
4. Функциональные схемы САР, применяемые на отечественном ЭПС.

Функциональная схема системы автоматики представляет собой её графическое изображение, подразделяющее рассматриваемую систему на элементы, выполняющие типовые функции. Элементом называют конструктивно обособленную часть автоматической системы, выполняющую определенные функции.
Несмотря на разнообразие систем автоматики, применяемых в различных областях техники, их функциональные схемы можно свести к ограниченному количеству типов. Это объясняется общностью законов управления для большинства таких систем. Следовательно, функциональные схемы различных систем можно построить из ограниченного набора типовых элементов.
Элементы различают по принципам действия (электромеханические, электромашинные, электромаг-нитные, пневматические, полупроводниковые, электронные и т. п.), по исполнению (общепромышленные, тяговые и т.п.), по конструкции, а также по функциональному назначению.
В зависимости от назначения различают следующие элементы:
Рекомендуемые материалы
задающий элемент (задатчик), с помощью которого в САР вводят сигнал g, пропорциональный заданному значению регулируемой величины у;
программный элемент, обеспечивающий изменение задаваемого значения g* регулируемой величины у по установленной программе;
чувствительный элемент, предназначенный для ввода в САР сигнала z, пропорционального текущему значению регулируемой вели чины у, а также сигналов qi*, характеризующих уровень возмущений q;
элемент сравнения, выполняющий сравнение сигналов, пропорциональных заданному и текущему значению регулируемой величины, для выявления ошибки или рассогласования Δ=g – z;
управляющий элемент, формирующий управляющее воздействие х в зависимости от значения рассогласо-вания Δ или от сигнала qi*, пропорционального возмущению;
исполнительный элемент, осуществляющий регулирующее воздействие μ на объект регулирования;
промежуточный элемент, выполняющий необходимое промежуточное преобразование сигнала.
Совокупность чувствительного, управляющего, исполнительного и промежуточных элементов, а также элемента сравнения представляет собой автоматический регулятор (АР).
Ввиду большого разнообразия промежуточных элементов их подразделяют дополнительно на усили-тельные, преобразовательные, логические и вычислительные.
Иногда управляющий элемент делят на регулятор, реализующий определенную зависимость х=f(Δ, q), и собственно управляющий элемент, формирующий по сигналу х алгоритм управления исполнительным элементом. Особенно наглядно такое деление при тиристорных исполнительных элементах на ЭПС. Так, например, на электровозе ВЛ85 все регуляторы входят в состав блока автоматического управления типа БАУ-250, а управляющие элементы – в состав блока управления выпрямительно-инверторным преобразователем типа БУВИП-1ЗЗ. При этом принцип действия управляющих элементов такой же, как и на электровозах ВЛ8ОР без автоматического управления.
Заметим, что для элемента сравнения применяют обычно особые обозначения. Если этот элемент выполняет сравнение двух величин, то его изображают в виде окружности, разделенной на секторы с указанием знаков подходящих к нему воздействий (рис. 5.4).
Если при сравнении сигнал у вычитают из g, то перед сектором, в который его вводят по схеме, возле стрелки ставится знак «минус» (рис. 5.4). Если к элементу сравнения подходит больше трех входных воздействий, то его изображают так, как показано на рис. 6.5в.
Возможно также совмещение нескольких функций в одном и том же конструктивном устройстве. Так, в системе автоматического пуска электропоездов функции задающего и чувствительного элементов, а также элемента сравнения выполняют отдельные части реле ускорения: возвратная пружина ВП, силовая катушка С, якорь Я (рис.6.2а). Наиболее часто сложные элементы состоят из различных промежуточных. Например, для усиления выходного сигнала в элементы сравнения вводят усилители.
Сравним упрощенную схему управления автоматическим пуском электропоезда (см. рис. 6.2а) и соответствующую ей функциональную схему (рис. 6.2б). Функции исполнительного элемента ИЭ выполняет реостатный контроллер РК, коммутирующий ступени пускового реостата Rп секции вторичной обмотки тягового трансформатора или реостата ослабления возбуждения, а также изменяющий группировки тяговых двигателей ТД, которые являются объектом регулирования ОР. Роль задающего элемента ЗЭ1 выполняет пружина ВП реле ускорения РУ, с помощью которой регулируется уставка наименьшего значения пускового тока Iм.
 Чувствительным элементом ЧЭ является силовая катушка С реле ускорения, а элементом сравнения – якорь Я магнитопровода М, к которому приложены сила возвратной пружины Рвп и электромагнитная сила Рэ зависящая от суммы магнитодвижущих сил (м.д.с.) Fнс и Fнп силовой С и подъемной П катушек. Преобразование м. д. с. в электромагнитную силу Рэ, происходит в магнитной системе РУ. На схеме, приведенной на рис. 6.2б, этому соответствует промежуточный элемент ПЭ1.
Чувствительным элементом ЧЭ является силовая катушка С реле ускорения, а элементом сравнения – якорь Я магнитопровода М, к которому приложены сила возвратной пружины Рвп и электромагнитная сила Рэ зависящая от суммы магнитодвижущих сил (м.д.с.) Fнс и Fнп силовой С и подъемной П катушек. Преобразование м. д. с. в электромагнитную силу Рэ, происходит в магнитной системе РУ. На схеме, приведенной на рис. 6.2б, этому соответствует промежуточный элемент ПЭ1.
После окончания перехода на очередную реостатную позицию ток i в силовой катушке по мере увеличения скорости уменьшается, и когда он становится равным Iм якорь Я реле ускорения под действием разности сил ΔР отпадает и замыкает контакты 1РУ цепи питания привода РК. Эти контакты следует рассматривать как промежуточный элемент ПЭ2, имеющий характеристику, приведенную на рис. 2.2в. При подаче напряжения питания и привод РК переключает реостатный контроллер на следующую позицию, в результате чего ток двигателя скачком возрастает, и якорь Я притягивается к магнитопроводу М, размыкая контакты 1РУ.
Машинист имеет возможность задавать с помощью контроллера КМ (задающий элемент ЗЭ2) позицию привода исполнительного элемента РК, на которой должен закончиться процесс пуска. Кроме того, машинист может изменять значение Iм, меняя напряжение питания катушки П с помощью кнопочного выключателя ПУ (задающий элемент ЗЭ3). Изменение уставки происходит также при буксовании, когда реле буксования РБ замыкает свой контакт в цепи катушки П.
В качестве примера рассмотрим некоторые варианты описания таких элементов структурных схем, как объект регулирования, исполнительный и управляющий элементы.
В общем случае объектом регулирования в системах автоматизации ЭПС является поезд, а конечной регулируемой величиной – параметры, характеризующие его перемещение, т. е. скорость v, путь l или время хода t. Однако в ряде частных случаев регулируемой величиной может быть сила тяги или ток тяговых двигателей. Поэтому целесообразно в общем случае рассмотреть объект регулирования в виде функциональной цепочки, в которой первые два блока соответствуют электромагнитным процессам в тяговом двигателе, а другие два блока – механическим процессам в тяговой передаче и собственно в поезде как в механической системе (рис. 6.2а).
 Вначале целесообразно рассмотреть только электромагнитные процессы (блок Wi), описываемые дифференциальными уравнениями в схеме замещения двигателя, содержащей только сосредоточенные элементы (активное сопротивление r, индуктивность l, источник – ЭДС). Ввиду того, что скорость протекания электромагнитных процессов по крайней мере на порядок выше скорости протекания механических процессов, целесообразно электромагнитные процессы рассматривать при неизменной скорости поезда v = const.
Вначале целесообразно рассмотреть только электромагнитные процессы (блок Wi), описываемые дифференциальными уравнениями в схеме замещения двигателя, содержащей только сосредоточенные элементы (активное сопротивление r, индуктивность l, источник – ЭДС). Ввиду того, что скорость протекания электромагнитных процессов по крайней мере на порядок выше скорости протекания механических процессов, целесообразно электромагнитные процессы рассматривать при неизменной скорости поезда v = const.
Если рассматривать тяговый двигатель последовательного возбуждения с электромагнитным моментом Мэ и силой тяги Fк, то для него возможны два способа регулирования, когда входной величиной являются соответственно напряжение питания ик (рис. 6.2б) или коэффициент регулирования м.д.с. β (рис. 6.2в).
Для двигателя независимого возбуждения тоже имеются два способа регулирования: по напряжению питания якорной обмотки ик (рис. 6.2г) и по напряжению питания обмотки возбуждения ив (рис. рис. 6.2д).
Таким образом, имеем четыре варианта возможных функциональных схем для рассматриваемой части объекта регулирования, т. е. для Wi.
Тяговый двигатель последовательного возбуждения, регулируемый по напряжению (рис. 6.3а) может быть описан нелинейным дифференциальным уравнением
 ,
,
 где ψ – потокосцепление; r – сопротивление обмоток двигателя; ик – приложенное к двигателю напряжение; е – ЭДС.
где ψ – потокосцепление; r – сопротивление обмоток двигателя; ик – приложенное к двигателю напряжение; е – ЭДС.
При этом ψ‚ может быть условно представлено как ψ =Li= wвФ где wв – количество витков обмотки возбуждения.
Индуктивность двигателя L сильно зависит от тока, а ЭДС определяется выражением е=сеФv, где величина сеФ представляет собой существенно нелинейную характеристику. Таким образом, L и е являются нелинейными функциями тока. На рис. 6.3б и в показан характерный вид функции сеФ(i) и L(i). Исходное нелинейное выражение целесообразно записать в виде
 ,
,
где выражение в скобках следует продифференцировать как произведение двух переменных, в результате чего получим
 .
.
В этом уравнении выражение в скобках представляет собой эквивалентную индуктивность нелинейной схемы замещения, т. е.  , которая может быть вычислена по характеристике L(i) (см. рис. 6.3в) при помощи производной dL/di (рис. 6.3г). Характерная зависимость Lэ(i) приведена на рис. 6.3д.
, которая может быть вычислена по характеристике L(i) (см. рис. 6.3в) при помощи производной dL/di (рис. 6.3г). Характерная зависимость Lэ(i) приведена на рис. 6.3д.
Таким образом, расчеты процессов регулирования с учетом не линейностей сводятся к решению полученного уравнения. Однако, поскольку расчеты САР ЭПС часто выполняют линейными методами, особенно на этапе сравнения вариантов, то для линеаризации рассматриваемого уравнения необходимо перейти к уравнению для малых отклонений переменных величин. Сущность метода малых отклонений состоит в том, что в качестве исходного рассматривается стационарное состояние системы, характеризующееся неизменными параметрами v0, Uк0, I0 и Ф т. е.
rI0=Uк0 – сеФv.
Далее задаются малым отклонением входной величины Δик(t), которое вызывает отклонение выходной величины Δi(t) (рис. 6.4а). При этом в окрестности выбранной базовой точки имеем Lэ0≈const, а зависимость магнитного потока (или ЭДС) от тока считаем линейной, т. е.
 .
.
Одновременно будем считать, что из-за большого различия в значениях постоянных времени электромагнитных и механических процессов (около двух порядков) влиянием изменения скорости на величину ЭДС можно пренебречь, т. е. будем считать, что
 .
.
С учетом этого получаем
 .
.
Вычитая из этого уравнения приведенное ранее уравнение стационарного режима для базовой точки и учитывая, что
 ,
,
получим
или в операторной форме
 ,
,
что позволяет записать передаточную функцию в виде
 , (6.1)
, (6.1)
 где
где  и
и  .
.
Таким образом, передаточная функция тягового двигателя последовательного возбуждения, регулируемого по напряжению, соответствует условной структурной схеме двигателя, приведенной на рис. 6.4б.
Двигатель последовательного возбуждения с регулированием м.д.с. (рис. 6.5а) описывается уравнением в отклонениях
 , (6.2)
, (6.2)
где rэ=βrв+rя – эквивалентное сопротивление двигателя при регулировании м.д.с.
 Поскольку β=βо+Δβ, то rэ=(βо+Δβ)rв+rя. Приращение тока возбуждения iв=βi можно выразить по формуле полного дифференциала в виде
Поскольку β=βо+Δβ, то rэ=(βо+Δβ)rв+rя. Приращение тока возбуждения iв=βi можно выразить по формуле полного дифференциала в виде
Δiв=Δiβ+ΔβI0.
Подставляя выражения для rэ и Δiв в уравнение (6.2) и пренебрегая величинами второго порядка малости типа ΔiΔβ или Δi2 получим окончательно:
 ,
,
что после применения операционного метода дает возможность составить структурную схему (рис. 6.5б).
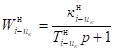
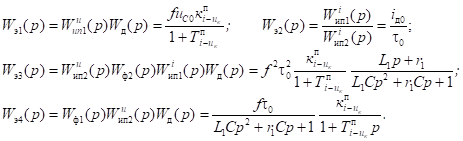
Преобразовав эту схему по известным правилам, к виду, показанному на рис. 6.5в и г, найдём передаточные функции тягового двигателя по регулирующему воздействию Δβ(р), т.е.  и по возмущению Δик(р), т.е.
и по возмущению Δик(р), т.е.  :
:
 ;
;
 .
.
 Эти передаточные функции соответствуют апериодическим звеньям 1-го порядка.
Эти передаточные функции соответствуют апериодическим звеньям 1-го порядка.
Двигатель независимого возбуждения, регулируемый по напряжению на якорной обмотке (рис. 6.6а и б), описывается уравнением в отклонениях
которое соответствует уравнению двигателя последовательного возбуждения для случая Ф=const и v=const. Из этого уравнения получим передаточную функцию в виде, соответствующем инерционному звену 1-го порядка, т. е.
при этом  .
.
Структурные схемы двигателя даны на рис. 6.6в и г.
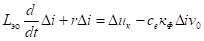
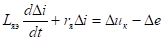
Для двигателя независимого возбуждения, регулируемого по цепи возбуждения (рис. 6.7а), процессы описываются системой уравнений в отклонениях:

 ,
,

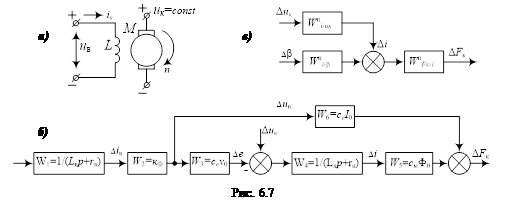
Структурная схема для этого варианта (рис. 6.7б) может быть преобразована к виду, приведенному на рис. 6.7в.
В соответствии с этим передаточные функции по регулирую-щему и возмущающему воздействиям определя-ются выражениями:
 ,
,
где  ;
;  ;
;  .
.
При дальнейшем анализе структурной цепочки (см. рис. 6.2а) целесообразно объединить элементы Wэм(р) и Wм(р) и рассматривать сразу преобразование тока i в силу тяги Fк. Вращающий момент тягового двигателя и соответственно сила тяги на ободе колеса пропорциональны произведению тока якорной обмотки и магнитного потока
Fк=смФi,
где см – электромеханическая постоянная.
В зависимости от варианта включения двигателя поток Ф может быть постоянной или переменной величиной. В двигателе последовательного возбуждения поток Ф нелинейно зависит от тока i.
Пользуясь методом базовой точки, можно записать уравнение стационарного режима для базовой точки
Fк0=смФ0I0.
С учетом малого отклонения входной величины
Fк0 +ΔFк =см (Ф0 +ΔФ) (I0+Δi).
Преобразуем это уравнение к виду
Fк0 +ΔFк =см (Ф0 +кФΔi) (I0+Δi)
Вычитая из последнего уравнения уравнение стационарного режима для базовой точки, получим
ΔFк =см (Ф0 Δi + кФI0Δi +кФΔi2)
Слагаемым с Δi2 можно пренебречь как величиной второго порядка малости. Тогда окончательно получим
ΔFк =см (Ф0 + кФI0)Δi,
что дает передаточную функцию в виде

 т.е. для выбранной базовой точки передаточная функция представляет постоянный коэффициент (рис. 6.8).
т.е. для выбранной базовой точки передаточная функция представляет постоянный коэффициент (рис. 6.8).
Такой же результат может быть получен и на основе формулы полного дифференциала
 .
.
 Заменяя здесь бесконечно малые отклонения конечными от исходного состояния и учитывая, что
Заменяя здесь бесконечно малые отклонения конечными от исходного состояния и учитывая, что  и
и  , получим:
, получим:
ΔFк =см Ф0 Δi + смI0ΔФ= см (Ф0 + кФI0)Δi. (6.3)
Для рассматриваемого способа регулирования связь между ΔFк и Δi можно получить непосредственно из электротяговой характеристики, выполнив ее линеаризацию (рис. 6.9):
ΔFк =кFк Δi.
В этом случае  определяется как тангенс угла наклона касательной, проведенной в точке (Fк0, I0) к кривой Fк(I).
определяется как тангенс угла наклона касательной, проведенной в точке (Fк0, I0) к кривой Fк(I).
Для двигателя последовательного возбуждения с регулированием м.д.с. (см. рис. 6.5) на изменения Fк будут влиять как изменения тока i, так и изменения магнитного потока Ф, поэтому (6.3) может быть выражено в операторной форме
 .
.
Для определения передаточной функции  воспользуемся преобразованиями структурной схемы, приведенными на рис. 6.5, из которых
воспользуемся преобразованиями структурной схемы, приведенными на рис. 6.5, из которых

Для тягового двигателя независимого возбуждения, регулируемого по напряжению (см. рис. 6.6а), при постоянном магнитном потоке имеет место пропорциональная зависимость Fк =см Ф0i, так что
 ,
,
т. е. передаточная функция соответствует постоянному коэффициенту как это показано на рис. 6.6г.
Для двигателя независимого возбуждения, у которого входной величиной является напряжение на обмотке возбуждения Δив (см. рис. 6.7а), преобразование ΔФ и Δi в ΔFк аналогично рассмотренному на рис. 6.5в. Перенося, как и в том случае, точку разветвления с выхода звена W2(р) на выход W4(р), получим передаточную функцию  для рассматриваемого варианта:
для рассматриваемого варианта:
 .
.
Последний элемент в схеме объекта регулирования Wv (см. рис. 6.4а) реализует преобразование, описываемое уравнением движения поезда,
где т – масса поезда; w0 – основное удельное сопротивление движению; wд – дополнительное сопротивление от уклонов и кривых.
Уравнение движения в малых отклонениях имеет вид
 .
.
Поскольку w0 = а0 + а1v + а2v2, то Δw0 = (а1 + 2а2v0)Δv. С учётом этого уравнение в отклонениях примет вид:
 ,
,
или в операторной форме записи

что соответствует структурной схеме, приведенной на рис. 6.10.
Преобразуем это уравнение к виду:

или Δv(р)=Wv1(р)ΔFк(р) – Wv2(р)Δwд(р),
где Wv1(р) и Wv2(р) – передаточные функции поезда как механической системы.
 Причём:
Причём:
 .
.
Таким образом, поезд как механическая система описывается передаточными функциями, соответствующими инерционному звену 1-го порядка. Следовательно, общая передаточная функция объекта регулирования (см. рис. 6.4а) может быть получена перемножением передаточных функций соответствующих блоков Wi(р), WF(р), Wv(р).
Исполнительные элементы. На ЭПС со ступенчатым регулированием функции исполнительного элемента выполняет силовой контроллер, при помощи которого осуществляют переключение позиций силовой схемы. При этом значительная часть позиций (ВЛ80К, ВЛ80С в режиме тяги) не являются ходовыми, что в сочетании со ступенчатым регулированием затрудняет автоматизацию тяговых электроприводов. Поэтому в настоящее время лишь на электропоездах, поездах метрополитена и пассажирских электровозах при ступенчатом регулировании используют автоматизацию по принципу стабилизации пускового или тормозного тока при одностороннем вращении силового контроллера.
Силовой контроллер, получив сигнал о переходе на новую позицию, отрабатывает его через время τ. Поэтому при разработке систем управления силовым контроллером он может рассматриваться как звено запаздывания с передаточной функцией W(p)=epτ. Это накладывает ограничение на время Ту между сменой сигнала управления Ту≥τ:
На грузовых электровозах применение автоматики предпочтительно при использовании исполнительных элементов, обеспечивающих плавное экономичное управление работой тяговых двигателей. На ЭПС переменного тока основным исполнительным элементом является управляемый выпрямитель, который может быть выполнен по диодно-тиристорной схеме (рис. 6.11) со статической характеристикой для относительного значения выпрямленного напряжения  ,
,
 , (6.4)
, (6.4)
где квыпр– коэффициент, значение которого определяется принятой схемой выпрямителя (для мостовой схемы  ; U2 – действующее значение переменного напряжения на вентильной обмотке.
; U2 – действующее значение переменного напряжения на вентильной обмотке.
 Несмотря на то, что эта схема обеспечивает регулирование выходного напряжения от 0 до иdмакс, для практического применения на электровозах и электропоездах её приходится усовершенствовать.
Несмотря на то, что эта схема обеспечивает регулирование выходного напряжения от 0 до иdмакс, для практического применения на электровозах и электропоездах её приходится усовершенствовать.
Во-первых, с целью реализации рекуперативного режима диоды VD1, VD2 заменяют на тиристоры, включая их в выпрямительном режиме с максимальным углом проводимости, т.е. – в диодном режиме. Во-вторых, простейший выпрямитель по рис. 6.11 при работе с малыми углами проводимости тиристоров VS1, VS2 характеризуется неудовлетворительными значениями коэффициента мощности и большими пульсациями выпрямленного напряжения. Поэтому на ЭПС обычно применяют выпрямители с зонно-фазовым регулированием (рис. 6.12).
 Для зарубежного ЭПС переменного тока характерна тенденция уменьшения числа зон до двух, а иногда и до одной, но при этом используют другие средства улучшения коэффициента мощности. Обычно они связаны с принудительным включением тиристоров выпрямителя (секторное или импульсное регулирование) или с применением компенсаторов реактивной мощности. Аналогичная цель достигается при импульсно-фазовом регулировании, которое использовано на электропоезде ЭР29 (при двух зонах). При этом достигается коэффициент мощности, практически равный единице. Однако регулировочные статические характеристики иd(α) при этом имеют вид, свойственный обычным управляемым выпрямителям, т.е. состоят из отрезков косинусоид.
Для зарубежного ЭПС переменного тока характерна тенденция уменьшения числа зон до двух, а иногда и до одной, но при этом используют другие средства улучшения коэффициента мощности. Обычно они связаны с принудительным включением тиристоров выпрямителя (секторное или импульсное регулирование) или с применением компенсаторов реактивной мощности. Аналогичная цель достигается при импульсно-фазовом регулировании, которое использовано на электропоезде ЭР29 (при двух зонах). При этом достигается коэффициент мощности, практически равный единице. Однако регулировочные статические характеристики иd(α) при этом имеют вид, свойственный обычным управляемым выпрямителям, т.е. состоят из отрезков косинусоид.
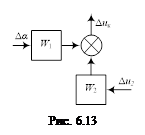
Инерционность управляемых выпрямителей связана с дискретностью генерации импульсов на включение тиристоров. После генерации очередного импульса управления следующее управляющее воздействие может быть реализовано только в очередном полупериоде, т.е. примерно через 0,01 с. Однако в условиях нормальных режимов такая задержка несущественна и ею пренебрегают. В этом случае работу управляемого выпрямителя описывают на основе выражения (6.4), считая, что изменение иd происходит как при изменении управляющего сигнала α, так и при изменении напряжения сети или напряжения вторичной обмотки трансформатора U2. Поэтому иd является нелинейной функцией двух аргументов α и U2, линеаризацию которой выполняют на основе формулы
Δиd(р)=W1(р)Δα(р) + W′2(р)Δu2(р), (6.5)
где W1(р) – передаточная функция по углу управления; W′2(р) – передаточная функция по входному напряжению, т.е. по возмущению.
Это уравнение может быть представлено в виде структурной схемы, приведенной на рис. 6.13, а передаточная функция входящая в выражение (6.5), соответствует усилительным звеньям:
 .
.
Здесь индексом «нуль» обозначены исходные начальные значения аргументов. При более детальном рассмотрении процессов, возникающих в цепи «тиристорный преобразователь–тяговый двигатель», необходимо составить соответствующую систему нелинейных дифференциальных уравнений.
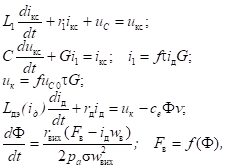
Уравнения электромагнитных процессов в выпрямительной установке цепей возбуждения. Силовая схема выпрямительной установки возбуждения (рис. 6.14а) включена на одну эквивалентную обмотку возбуждения ОВ тягового двигателя, зашунтированную сопротивлением r3. Управление этой установкой осуществляется импульсами, поступающими от управляющего элемента в моменты времени αp1/2πfc и αp2/2πfc положительного и отрицательного полупериодов на вентили VS1, и VS2 соответственно (рис. 6.146).
Допустим, что в исходном состоянии этой схемы вентиль VS2 был открыт, тогда при подаче управляющего импульса в момент αp1/2πfc открывается вентиль VS1 и возникает процесс коммутации, в результате которого происходит запирание вентиля VS2. Цепь тока (рис. 6.14в) содержит ЭДС етр полуобмоток трансформатора, индуктивные и активные сопротивления этих полуобмоток Lтр и rтр и обмотки возбуждения Lв и rв. Кроме того, учитывается влияние контура вихревого тока iвих с параметрами Lвих и rвих. Уравнения для этого состояния схемы имеет вид:

 (6.6)
(6.6)
 где G1, G2 – логические функции;
где G1, G2 – логические функции;  – динамическая индуктивность обмотки возбуждения; Fв=wвiв-wвихiвих – намагничивающая сила обмотки возбуждения; wв и wвих – количество витков соответственно обмоток возбуждения и контура вихревых токов; ра – количество пар полюсов; σ – коэффициент рассеяния.
– динамическая индуктивность обмотки возбуждения; Fв=wвiв-wвихiвих – намагничивающая сила обмотки возбуждения; wв и wвих – количество витков соответственно обмоток возбуждения и контура вихревых токов; ра – количество пар полюсов; σ – коэффициент рассеяния.
Зависимость Fв =f(Ф) является обратной по отношению кривой намагничивания Ф= F(Fв).
Завершением этого процесса является запирание вентиля VS2, которое произойдет в момент времени (αp1+γ)/(2πfc). Начиная с этого момента ток протекает только по первой полуобмотке трансформа тора. Уравнения для этого режима можно получить из системы (6.5), приняв ток iтр2 и производную diтр2/dt равными нулю.
В момент времени (π+αp2)/(2πfc) подается управляющий импульс на вентиль VS2. Этот вентиль открывается и начинается новый процесс коммутации, в результате которого произойдет запирание вентиля VS1. Такой режим работы соответствует схеме на рис. 6.14в при обратном направлении показанном на этом рисунке штриховыми стрелками, и описывается теми же уравнениями (6.6). После запирания VS1 в момент времени (π+αp2+γ)/(2πfc) ток протекает только по второй полуобмотке трансформатора. Уравнения для этого режима работы схемы можно также получить из системы (6.6), приняв ток iтр1 и производную diтр1/dt равными нулю. Таблица 6.1
| Момент времени | Значение логической функции | |
| G1 | G2 | |
|
| 1 | 1 |
|
| 1 | 0 |
|
| 1 | 1 |
|
| 0 | 1 |




Подача следующего управляющего импульса на вентиль VS1 в момент (2π+αp1)/(2πfc) вызовет новый процесс коммутации токов по схеме, приведенной на рис. 6.14в, и начнется второй цикл работы выпрямительной установки возбуждения. Для получения обобщённой записи уравнений состояния схемы, приведенной на рис. 6.14а, в систему (6.6) введены дополнительно логические функции G1 и G2 (табл. 6.1), которые в зависимости от подачи управляющих импульсов могут принимать одно из двух значений – 0 или 1.
Решение системы уравнений (6.6) выполняют на ЭВМ, задавая нелинейные зависимости Ф(iв) и Lэв(iв) в виде таблиц или аппроксимирующих полиномов. Для примера на рис. 6.14б приведены результаты решения системы уравнений (6.6) для электровоза ВЛ85 в виде кривых иd(ωt) и iв(ωt). Как видно из этого рисунка, кривая iв(ωt) имеет сложную форму, содержащую помимо основной составляющей с периодом 1/(2πfc) ещё высокочастотные гармоники. При использовании этой системы уравнений для описания работы САР её не обходимо дополнить уравнениями остальных функциональных элементов системы (уравнениями датчика, элемента сравнения, регулятора и управляющего элемента).
Уравнения электромагнитных процессов в тяговом двигателе последовательного возбуждения, получающем питание от выпрямительно-инверторного преобразователя (ВНП). Электромагнитные процессы в тяговом двигателе последовательного возбуждения так же, как и в выпрямительной установке цепей возбуждения, можно описать уравнениями при рассмотрении эквивалентной схемы замещения силовых цепей, соответствующей проводящему состоянию вентилей, аналогично схеме, приведенной на рис. 6.12. Для открытия вентилей ВНП управляющий элемент формирует ряд импульсов управления. В режиме тяги к ним относятся:
– импульс α0, формируемый в начале полупериода с фазой около 8…10° при наличии потенциальных условий для открытия тиристоров;
– импульс α0з формируемый в зависимости от особенностей протекания процесса коммутации в вентилях;
– регулируемый по фазе импульс αp, с помощью которого выполняется плавное регулирование напряжения ик на зажимах двигателя.
В режиме рекуперации формируются два вида импульсов: αp и αβ, причём последний обеспечивает опережение открытия тиристоров относительно окончания полупериода на величину угла запаса δ. Для поддержания постоянства угла δ выполняется автоматическое регулирование угла β. В соответствии с этим уравнения, описывающие состояние схемы, приведенной на рис. 6.12, можно представить в виде:

 (6.7)
(6.7)
где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора; rд – сопротивление тягового двигателя.
Здесь iк, Lк и rк характеризуют цепь фазовой коммутации. Значения етр, Lтр и rтр определяются номером зоны регулирования.
 Для описания электромагнитных переходных процессов в режиме рекуперации из уравнений (6.7) необходимо исключить составляющие, относящиеся к обмотке возбуждения. Значения логических функций G1, G2 и G3, как и для выпрямительной установки цепей возбуждения, определяются интервалами расчета мгновенных схем замещения, соответствующих проводящим состояниям вентилей.
Для описания электромагнитных переходных процессов в режиме рекуперации из уравнений (6.7) необходимо исключить составляющие, относящиеся к обмотке возбуждения. Значения логических функций G1, G2 и G3, как и для выпрямительной установки цепей возбуждения, определяются интервалами расчета мгновенных схем замещения, соответствующих проводящим состояниям вентилей.
На ЭПС постоянного тока плавное экономичное регулирование возможно при помощи импульсных преобразователей (рис. 6.15а и б). Обычно используемые для этих целей импульсные преобразователи с параллельной емкостной коммутацией имеют линейную статическую характеристику (рис. 6.15в):
 .
.
Коэффициент заполнения k=τ/tп представляет собой отношение длительности τ проводящего состояния преобразователя к периоду tп следования импульсов. По тем же причинам, что и для управляемых выпрямителей, дискретность и запаздывание собственно импульсного преобразователя не учитывают. Однако для реальных импульсных преобразователей необходимо учесть инерционность, связанную с наличием входного фильтра, обладающего индуктивностью L1, активным сопротивлением r1 и емкостью С (рис. 6.15г).
Таким образом, пренебрегая дискретностью и запаздыванием собственно импульсного преобразователя, работу схемы, приведенной на рис. 6.15г, для усредненных за период tп ‚ параметров электромагнитного процесса в фильтре можно описать системой дифференциальных уравнений при малых отклонениях всех переменных:

 (6.8)
(6.8)
Все обозначения ясны из рисунка. Уравнения для Δик и Δi1 получены линеаризацией по формуле полного дифференциала.
Запишем эти уравнения в операторной форме, подставив из второго уравнения Δiкс в первое:
 (6.9)
(6.9)
Передаточные функции:
фильтра 
импульсного преобразователя
по напряжению  (6.10)
(6.10)
по току  (6.11)
(6.11)
передаточная функция тягового двигателя последовательного возбуждения в соответствии с формулой (6.1)
 .
.
Заметим, что выражения (6.10) и (6.11) получены на основе линеаризации третьего и пятого уравнений системы (6.8). При этом в качестве аргументов были приняты малые отклонения управляющего сигнала Δτ, а также напряжения ΔиС и Δiд тока от исходного состояния, характеризуемого величинами τ0, ΔиС0 и Δiд0.
Структурная схема, соответствующая системе уравнений (6.9), приведена на рис. 6.16а. Преобразуем эту схему, для чего перенесем сумматор с выхода звена  на его вход, а со входов звеньев
на его вход, а со входов звеньев  и
и  на их выходы (рис. 6.16б). При этом:
на их выходы (рис. 6.16б). При этом:
На следующем этапе перенесём точку разветвления координаты Δiд(р) через сумматор, после этого перенесём точку разветвления с выхода звена  на его вход и преобразуем первый сумматор (рис. 6.16г). В этой схеме исключены все местные связи и система (6.9) представлена в виде окончательной структурной схемы (рис. 6.16д), по которой
на его вход и преобразуем первый сумматор (рис. 6.16г). В этой схеме исключены все местные связи и система (6.9) представлена в виде окончательной структурной схемы (рис. 6.16д), по которой
 (6.12)
(6.12)
В выражении (6.12)

 Рассмотренное представление тягового электропривода с импульсным преобразователем как линеаризованной системы позволило использовать для его описания передаточные функции и соответственно линейные методы расчета систем автоматического регулирования. Возможен и другой подход, который сводится к записи и решению нелинейных уравнений. Для исходной схемы (см. рис. 6.15г) по аналогии с системой уравнений (6.7) имеем:
Рассмотренное представление тягового электропривода с импульсным преобразователем как линеаризованной системы позволило использовать для его описания передаточные функции и соответственно линейные методы расчета систем автоматического регулирования. Возможен и другой подход, который сводится к записи и решению нелинейных уравнений. Для исходной схемы (см. рис. 6.15г) по аналогии с системой уравнений (6.7) имеем:
где G – логическая функция, принимающая значение 0 в непроводящем состоянии импульсного преобразователя и 1 – в проводящем.
Динамическая индуктивность тягового двигателя  .
.
 Существенная особенность импульсных преобразователей связана с ограниченностью диапазона регулирования выходного напряжения, поскольку коэффициент заполнения k=Δτ/tп при включении тяговых двигателей, т.е. при трогании поезда, обычно можно наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля. Это связано с особенностями выполнения контура коммутации при помощи которого выключают главный тиристор VS1 (см. рис. 6.15а).
Существенная особенность импульсных преобразователей связана с ограниченностью диапазона регулирования выходного напряжения, поскольку коэффициент заполнения k=Δτ/tп при включении тяговых двигателей, т.е. при трогании поезда, обычно можно наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля. Это связано с особенностями выполнения контура коммутации при помощи которого выключают главный тиристор VS1 (см. рис. 6.15а).
Необходимое значение kмин рассчитывают из условия плавности трогания поезда, т.е. из минимально необходимой величины пускового ускорения атр в момент включения тяговых двигателей.
Импульсный преобразователь можно применять не только для регулирования напряжения на тяговом двигателе, но и, например, для плавного регулирования сопротивления (на электропоезде ЭР200, где преобразователь ИП (рис. 6.17) включен параллельно секции пускового реостата R1. При этом результирующее сопротивление секции R1′=R1(1– –k). При пуске двигателей на электропоезде ЭР200 вначале выводят секцию R1 преобразователем ИП, меняя k от нуля до единицы. Затем выключают ИП (k = 0) и одновременно контактором К2 шунтируют секцию R2, после чего повторяют процесс регулирования сопротивления R1. Далее так же шунтируют секции R3 и R4.
Этот же принцип использован на поезде ЭР200 для регулирования возбуждения тяговых двигателей. Для этого ИП с резистором R включён параллельно обмотке возбуждения L (рис. 6.18а).
Коэффициент регулирования поля (β=βмин…1)
 ,
,
где rв – сопротивление обмотки возбуждения.
 Регулировочная характеристика, показанная на рис. 6.18а, существенно нелинейна, причём характер нелинейности зависит от соотношения rв /R. Исполнительный элемент ИП описывается передаточной функцией W(р) = dβ/dτ.
Регулировочная характеристика, показанная на рис. 6.18а, существенно нелинейна, причём характер нелинейности зависит от соотношения rв /R. Исполнительный элемент ИП описывается передаточной функцией W(р) = dβ/dτ.
Если необходима линейная регулировочная характеристика β=β(τ), то используют схему ИП с двумя поочерёдно включаемыми тиристорными ключами ИП1 и ИП2 (рис. 6.18б), имеющими общее устройство искусственной коммутации УИК. Эта схема имеет регулировочную характеристику
 ,
,
которая линейна во всем диапазоне изменения τ.
 Управляющие элементы. Поскольку исполнительным элементом в САР ЭПС является тиристорный преобразователь постоянного или переменного тока, то возникает необходимость в специальных управляющих элементах УЭ (рис. 6.19), которые должны на базе аналоговых или цифровых сигналов иу, поступающих с выхода регулятора Р, вырабатывать управляющие сигналы для включения тиристоров исполнительного элемента. Имеются две принципиальные схемы УЭ, которые различаются способом гальванического разделения низковольтных и высоковольтных цепей исполнительного элемента. Это гальваническое разделение может быть выполнено на выходе формирователя импульсов управления ФИ (рис. 6.19а) либо на выходе усилителя импульсов управления УМ (рис. 6.19б). Средством гальванического разделения может быть импульсный трансформатор ИТ, как показано на рис. 6.19 или же оптронный элемент типа «светодиод–фототиристор», «светодиод–фототранзистор» и т. д. Более детальное рассмотрение структурных схем цепей управления полупроводниковыми приборами рассматривается в курсе «Электронные импульсные системы управления электрическим транспортом».
Управляющие элементы. Поскольку исполнительным элементом в САР ЭПС является тиристорный преобразователь постоянного или переменного тока, то возникает необходимость в специальных управляющих элементах УЭ (рис. 6.19), которые должны на базе аналоговых или цифровых сигналов иу, поступающих с выхода регулятора Р, вырабатывать управляющие сигналы для включения тиристоров исполнительного элемента. Имеются две принципиальные схемы УЭ, которые различаются способом гальванического разделения низковольтных и высоковольтных цепей исполнительного элемента. Это гальваническое разделение может быть выполнено на выходе формирователя импульсов управления ФИ (рис. 6.19а) либо на выходе усилителя импульсов управления УМ (рис. 6.19б). Средством гальванического разделения может быть импульсный трансформатор ИТ, как показано на рис. 6.19 или же оптронный элемент типа «светодиод–фототиристор», «светодиод–фототранзистор» и т. д. Более детальное рассмотрение структурных схем цепей управления полупроводниковыми приборами рассматривается в курсе «Электронные импульсные системы управления электрическим транспортом».
В тиристорных преобразователях постоянного и переменного тока функции УЭ примерно одинаковы и сводятся к реализации регулируемой задержки времени включения тиристора по отношению к некоторому фиксированному моменту времени. В преобразователях переменного тока указанный фиксированный момент времени – это переход переменного напряжения через нуль. Фиксация момента перехода осуществляется блоком синхронизации БС (рис. 6.20), который дает сигнал и на запуск генератора пилообразного напряжения ГПН. Выходное напряжение этого генератора сравнивают в элементе сравнения ЭС с управляющим напряжением, которое в форме аналогового сигнала поступает в управляющий элемент с выхода регулятора. В момент равенства напряжений (иу=иГПН) узел сравнения выдает. Далее эти импульсы распределяют по каналам управления тиристорами при помощи распределителя импульсов РИ, а затем через усилители мощности импульсов управления УМ – на тиристоры.
Если импульсы управления для включения всех тиристоров преобразователя формируют в одном канале, то такие системы называют одноканальными. Возможен и другой вариант, когда для каждой пары тиристорных плеч, работающих в противофазе, предусмотрено свое устройство фазового управления, т. е. свой УЭ. Обычно при многозонном регулировании выпрями-телей на электровозах ВЛ80Р и ВЛ85 тиристоры, обеспечивающие фазовое регулирование напряжения в определенной зоне, имеют свой фазорегулятор. В таких многоканальных системах увеличивается количество оборудования в составе УЭ, но упрощается логическая часть, связанная с переключениями очередности срабаты-вания устройств фазорегулирования по зонам. Однако и в многоканальных системах импульсы управления каждой парой тиристорных плеч, работающих в противофазе, формируют в общем канале, чтобы исключить даже незначительное расхождение по фазе между этими импульсами и избежать появления постоянной составляющей в первичном токе тягового трансформатора. Эта постоянная составляющая опасна тем, что вызывает подмагничивание трансформаторов, создавая тем самым аварийный режим. Поэтому к симметрии управляющих импульсов в преобразователях переменного тока предъявляют жесткие требования – их расхождение по фазе для разных полуволн не должно превышать 0,25 %.
 Практически все узлы фазорегулятора могут быть выполнены на типовых операционных усилителях. Блок синхронизации БС – это усилитель в режиме нуль-органа, сравнивающий напряжение переменного тока с напряжением источника нулевого потенциала. Сложность выполнения БС связана с сильными искажениями напряжения в контактной сети. Переход через нуль может иметь место несколько раз в начале каждой полуволны, поэтому для правильности отсчета фазы на входе БС необходимо устанавливать фильтр Ф, который обеспечивает передачу на вход БС основной гармоники питающего напряжения.
Практически все узлы фазорегулятора могут быть выполнены на типовых операционных усилителях. Блок синхронизации БС – это усилитель в режиме нуль-органа, сравнивающий напряжение переменного тока с напряжением источника нулевого потенциала. Сложность выполнения БС связана с сильными искажениями напряжения в контактной сети. Переход через нуль может иметь место несколько раз в начале каждой полуволны, поэтому для правильности отсчета фазы на входе БС необходимо устанавливать фильтр Ф, который обеспечивает передачу на вход БС основной гармоники питающего напряжения.
В качестве ГПН используют операционный усилитель в режиме интегратора, подключая его к источнику стабильного напряжения. Тогда выходной сигнал этого усилителя будет представлять собой линейно нарастающее в функции времени напряжение (так называемое пилообразное напряжение). Узел сравнения ЭС также выполняют на операционном усилителе, но без элементов обратной связи. Такой усилитель, имея очень большой коэффициент усиления (до 105) при любых соотношениях сравниваемых сигналов будет выдавать на выходе максимальное напряжение и лишь в момент равенства входных сигналов выходной сигнал кратковременно принимает нулевое значение; этот сигнал и используют для формирования отпирающих импульсов.
Аналогичным образом выполняют и управляющие элементы для преобразователей постоянного тока. В этом случае также необходима синхронизация (особенно в многофазных преобразователях), которая осуществляется привязкой к моменту отпирания главного либо гасящего тиристора фазы. Таким образом, для управления импульсным преобразователем с главным и вспомогательным тиристорами можно использовать систему, приведенную на рис. 6.20.
 Более надёжными и помехозащищёнными являются цифровые системы (рис. 6.21), которые обеспечивают высокую стабильность и точность регулирования фазы. Схема цифрового УЭ для импульсного преобразователя содержит регистр Рг, на котором зафиксировано заданное значение фазы, т. е. длительности выходного импульса преобразователя в форме двоичного кода. Это значение сравнивают с содержимым тактового счетчика СчТ, который подключен к выходу генератора тактовых импульсов ГТИ высокой частоты 20…50 кГц. Сравнение кодов Рг и ТСч осуществляется схемой сравнения ЭС. В момент равенства кодов ЭС генерирует импульс на включение гасящего тиристора VS2. Включение главного тиристора VS1 осуществляется задающим генератором импульсов ЗГ, частота которого равна рабочей частоте преобразователя.
Более надёжными и помехозащищёнными являются цифровые системы (рис. 6.21), которые обеспечивают высокую стабильность и точность регулирования фазы. Схема цифрового УЭ для импульсного преобразователя содержит регистр Рг, на котором зафиксировано заданное значение фазы, т. е. длительности выходного импульса преобразователя в форме двоичного кода. Это значение сравнивают с содержимым тактового счетчика СчТ, который подключен к выходу генератора тактовых импульсов ГТИ высокой частоты 20…50 кГц. Сравнение кодов Рг и ТСч осуществляется схемой сравнения ЭС. В момент равенства кодов ЭС генерирует импульс на включение гасящего тиристора VS2. Включение главного тиристора VS1 осуществляется задающим генератором импульсов ЗГ, частота которого равна рабочей частоте преобразователя.

Функциональные схемы систем автоматического регулирования можно свести к трем основным типам, которые соответствуют различным принципам регулирования – по возмущению, по отклонению и комбинированному регулированию. Кроме того, в последнее время широкое распространение получают адаптивные САР.
Принцип регулирования по возмущению был предложен французским ученым Понселе и впервые реализован русским электротехником В.Н. Чиколевым.
 В основу этого принципа положено регулирование по разомкнутому циклу, при котором отсутствует контроль исполнения задающего сигнала g, так как не предусмотрена обратная связь по регулируемому показателю у. Для того чтобы устранить возникающее под влиянием возмущений q1, q2, ..., qп отклонение величины у от его значения уз соответствующего сигналу g, в регулятор подают сигналы, пропорциональные этим возмущениям. Предполагается, что эти сигналы могут корректировать работу регулятора АР, если их прибавлять к сигналу g (рис. 6.22), т. е. выполняется условие для управляющего сигнала:
В основу этого принципа положено регулирование по разомкнутому циклу, при котором отсутствует контроль исполнения задающего сигнала g, так как не предусмотрена обратная связь по регулируемому показателю у. Для того чтобы устранить возникающее под влиянием возмущений q1, q2, ..., qп отклонение величины у от его значения уз соответствующего сигналу g, в регулятор подают сигналы, пропорциональные этим возмущениям. Предполагается, что эти сигналы могут корректировать работу регулятора АР, если их прибавлять к сигналу g (рис. 6.22), т. е. выполняется условие для управляющего сигнала:
х(t)=g(t)+ qi*(t).
Таким образом создается инвариантность (независимость) регулируемого показателя у от возмуще-ния qi. Несмотря на сравнительную простоту, система обычно не в состоянии обеспечить точное регулирование. Без существенного усложнения удается создать по этому принципу САР, компенсирующую действие лишь одного, реже двух возмущений, тогда как их число обычно велико. Наличие неконтролируемых возмущений приводит к тому, что выдержать закон регулирования нельзя. В общем случае закон регулирования такой САР формируется в виде
 .
.
Введение в закон регулирования производных позволяет учитывать тенденции изменения возмущений, что несколько улучшает динамические свойства САР.
 Отсутствие обратной связи по регулируемому показателю приводит к тому, что на точность регулирования оказывают влияние все отклонения параметров регулятора (например, обусловленные износом или старением). Это приводит к ограниченному применению САР, работающих по разомкнутому циклу, и в том числе САР с регулированием по возмущению. Обычно их применяют только в качестве составной части более совершенных комбинированных систем.
Отсутствие обратной связи по регулируемому показателю приводит к тому, что на точность регулирования оказывают влияние все отклонения параметров регулятора (например, обусловленные износом или старением). Это приводит к ограниченному применению САР, работающих по разомкнутому циклу, и в том числе САР с регулированием по возмущению. Обычно их применяют только в качестве составной части более совершенных комбинированных систем.
Принцип регулирования по отклонению (по ошибке) был впервые использован И. И. Ползуновым в регуляторе уровня воды, а затем Дж. Уаттом в регуляторе частоты вращения вала паровой машины.
Принцип регулирования по отклонению (рис. 6.23) состоит в том, что регулятор АР по цепи обратной связи воспринимает действительное значение регулируемой величины у, сопоставляет его с сигналом g, пропорциональным заданному ее значению, и в зависимости от отклонения (ошибки) Δ вырабатывает такое управляющее воздействие х, которое сводит эту ошибку к минимуму. Закон регулирования в общем виде выражается уравнением
 .
.
В это уравнение в отличие от предыдущего входят интегралы от ошибки, что позволяет получить САР с нулевыми средними ошибками, которые называют астатическими.
Основное преимущество САР, работающих по отклонению, заключается в способности выполнять регулирование независимо от возмущающих воздействий. В таких САР нет необходимости измерять и вводить в регулятор показатели возмущений, так как измеряется непосредственно та ошибка, которая вызвана воздействием всех возмущений, Δ(t)=g(t) – z(t).
Выявив появление ошибки, система ликвидирует ее. Увеличение количества видов возмущений обычно не усложняет системы, так как их действие компенсируется наличием обратной связи по регулируемой величине.
Другое преимущество САР, работающих по отклонению, заключается в отсутствии жестких требований к стабильности характеристик объекта регулирования и элементов автоматического регулятора, кроме чувствительного и задающего, а также элемента сравнения. Это объясняется тем, что изменение параметров регулятора или объекта регулирования приводит лишь к изменению величины ошибки, которая выявляется и ликвидируется самим регулятором. Погрешность работы САР прежде всего зависит от того, насколько точно измеряют регулируемую величину и выделяют сигнал ошибки.
Эти преимущества объясняются тем, что САР, осуществляющие регулирование по ошибке, работают по замкнутому циклу и представляют собой системы с обратной связью. Замкнутые САР имеют и ряд недостатков. Поскольку управляющее воздействие х появляется только при Δ≠0, то в начале процесса регулирования, т. е. сразу после включения регулятора, возникает некоторая ошибка, а затем уже автоматический регулятор стремится ее ликвидировать. Кроме того, замкнутые системы склонны к колебаниям, особенно при высоком быстродействии.
Комбинированный принцип обычно позволяет получить более высокое качество регулирования, так как замкнутую САР по отклонению дополняют регулированием по задающему воздействию (рис. 6.24а). При этом регулируемая величина у полностью воспроизводит изменение задающей величины g (в частном случае z=g), а отклонения Δ, возникающие под влиянием возмущений qi, компенсируются регулированием по отклонению. Введи регулирование по задающему воздействию, можно обеспечить инвариантность системы по отношению к этому задающему воздействию.
 Комбинированное регулирование выполняется также по отклонению и возмущению (рис. 6.24б). Контур регулирования, работающий по разомкнутому циклу, обеспечивает инвариантность регулируемой величины по отношению к одному из основных возмущений, наиболее сильно влияющему на регулируемую величину. Контур регулирования, работающий по замкнутому циклу, компенсирует отклонения, вызванные другими возмущениями.
Комбинированное регулирование выполняется также по отклонению и возмущению (рис. 6.24б). Контур регулирования, работающий по разомкнутому циклу, обеспечивает инвариантность регулируемой величины по отношению к одному из основных возмущений, наиболее сильно влияющему на регулируемую величину. Контур регулирования, работающий по замкнутому циклу, компенсирует отклонения, вызванные другими возмущениями.
Комбинированная САР, выполняющая одновременно регулирование по отклонению, задающему и возмущающим воздействиям и обеспечивающая инвариантность по всем этим воздействиям (рис. 6.24в), может быть применена на ЭПС, где возмущением является напряжение на токоприемнике Uкс, что дает возможность реализовать заданное значение тока тяговых двигателей или скорости движения независимо от колебаний напряжения на токоприемнике
Адаптивные системы применяют в условиях неопределенности, связанной с незнанием параметров объекта регулирования. Такая неопределенность возникает потому, что реальные параметры каждого объекта отличаются от расчетных из-за отклонений в свойствах исходных материалов. Кроме того, на ЭПС изменения параметров объектов регулирования вызываются изменениями:
– электромагнитных параметров тягового двигателя из-за нелинейности его характеристик и нагрева обмоток в процессе эксплуатации;
– параметров и даже структуры силовых цепей в процессе управления, т. е. при выведении пусковых ступеней, переключении схемы соединения тяговых двигателей, работе тиристорных преобразователей;
– параметров тяговой сети при движении ЭПС по перегону;
– условий сцепления в зависимости от состояния рельсов, массы поезда и загрузки пассажирами вагона.
В связи с этим принципы построения адаптивных систем представляют большой практический интерес и при создании САР ЭПС.
Адаптивные САР подразделяют на три группы:
прямые адаптивные системы (рис. 6.25а), в которых наблюдения используют для непосредственного измерения параметров регулятора. Такие системы применяют в случае, когда свойства объектов регулирования и параметры регулятора полностью определены внешними факторами и доступны прямому измерению. При этом адаптер А полностью определяет настройку Н автоматического регулятора АР;
 непрямые адаптивные системы, схема которых в дополнении к предыдущей содержит идентификатор И (рис. 6.25б). В этих системах по результатам измерений задающего g и регулирующего μ воздействий, а также реакции у объекта на это воздействие может быть выполнено уточнение параметров ξ ОР и действующих возмущений q — идентификация. В зависимости от найденных параметров ξ адаптер А изменяет настройку автоматического регулятора АР;
непрямые адаптивные системы, схема которых в дополнении к предыдущей содержит идентификатор И (рис. 6.25б). В этих системах по результатам измерений задающего g и регулирующего μ воздействий, а также реакции у объекта на это воздействие может быть выполнено уточнение параметров ξ ОР и действующих возмущений q — идентификация. В зависимости от найденных параметров ξ адаптер А изменяет настройку автоматического регулятора АР;
квазипрямые адаптивные системы, в которых используют иные возможности, отличные от непосредственного измерения параметров АР и оценивания (идентификации) параметров объекта. Функциональная схема такой системы (рис. 6.25в) содержит предсказатель П и адаптер А. Предсказатель состоит из модели предсказания, кото рая отличается как от модели объекта, так и от модели регулятора, и алгоритма предсказания, в соответствии с которым находят оценки некоторых вспомогательных параметров, необходимых для работы адаптера А.
Поскольку причины отклонения истинных параметров объектов регулирования ЭПС от их расчетных значений весьма разнообразны, в САР ЭПС могут применяться различные принципы адаптации. Так, например, для учёта массы поезда и загрузки вагона пассажирами может быть использован прямой способ адаптации, а для учета изменения электромагнитных параметров силовых цепей перспективны непрямые адаптивные системы.

Одноконтурные системы стабилизации тока и скорости ЭПС. САР с одноконтурными функциональными схемами относятся к наиболее простым системам, работающим по замкнутому циклу, т.е. с регулированием по отклонению.
Функциональные схемы систем хронометрического регулирования при пуске. Такая система является разомкнутой; в ней исполнительный элемент производит набор или сброс позиций с постоянной скоростью, а машинист лишь дает команды на выполнение этих операций.
 Хронометрическое регулирование пуска предусматривает переключение позиций с постоянной скоростью, т.е. с постоянным временем между переключениями Δt=const (рис. 6.26). При подаче с задающего элемента ЗЭ, которым является контроллер машиниста КМ, на элемент управления УЭ привода группового реостатного контроллера ЭКГ сигнала управления g последний преобразуется в сигнал х, поступающий на исполнительный элемент ИЭ, заставляя его переходить на следующую позицию. Из-за непостоянства момента сопротивления ЭКГ (группового контроллера) постоянства скорости вращения можно достичь, только предусмотрев в исполнительном элементе ИЭ обратную связь ОС по времени. Её осуществляют, применяя для включения очередной позиции ЭКГ реле выдержки времени, срабатывающее по истечении периода Δt после включения предыдущей позиции. В случае постоянства среднего ускорения а=const приращение скорости между смежными позициями Δv также примерно постоянно: Δv=аΔt ≈ const.
Хронометрическое регулирование пуска предусматривает переключение позиций с постоянной скоростью, т.е. с постоянным временем между переключениями Δt=const (рис. 6.26). При подаче с задающего элемента ЗЭ, которым является контроллер машиниста КМ, на элемент управления УЭ привода группового реостатного контроллера ЭКГ сигнала управления g последний преобразуется в сигнал х, поступающий на исполнительный элемент ИЭ, заставляя его переходить на следующую позицию. Из-за непостоянства момента сопротивления ЭКГ (группового контроллера) постоянства скорости вращения можно достичь, только предусмотрев в исполнительном элементе ИЭ обратную связь ОС по времени. Её осуществляют, применяя для включения очередной позиции ЭКГ реле выдержки времени, срабатывающее по истечении периода Δt после включения предыдущей позиции. В случае постоянства среднего ускорения а=const приращение скорости между смежными позициями Δv также примерно постоянно: Δv=аΔt ≈ const.
Рабочая информация о работе системы поступает к машинисту в виде показаний амперметра А и указателя номера позиций УНП.
Система хронометрического в предусмотрена на электровозах ВЛ60, ВЛ80, ЧС2 и ЧС4. Для грузовых электровозов вес поезда изменяется в широких пределах, поэтому такая система не вполне оправдала себя в эксплуатации, так как пусковой ток изменяется в очень широких пределах. Более эффективна эта система для электропоездов (первые пусковые позиции, вагонов метрополитена), так как позволяет примерно сохранять заданное значение пускового ускорения при изменяющихся нагрузках.
Функциональные схемы стабилизации тока ЭПС. Одноконтурные системы стабилизации тока наиболее широко применяют для автоматического регулирования пусковых и тормозных режимов ЭПС.
Для условий ступенчатого регулирования тока функциональная схема такой САР пускового регулирования электропоезда была описана ранее. Аналогичной функциональная схема будет и при плавном регулировании тока, поэтому для всех подобных систем можно составить одну обобщенную функциональную схему (рис.6.27а).
 В этой схеме задающий элемент представляет собой либо часть реле автоматического пуска (ускорения), либо контроллер управления или другое подобное устройство. В зависимости от типа локомотива исполнительный элемент ИЭ может быть выполнен в виде силового контроллера в комплекте с пусковым реостатом или трансформатором, либо в виде тиристорного преобразователя. Так, тиристорные преобразователи предусмотрены на электропоездах ЭР2И, ЭР12 и ЭР25 (для тормозного режима). Структура промежуточных элементов ПЭ и элементов управления УЭ зависит преимущественно от того, что представляет собой ИЭ. При ступенчатом регулировании обычно исполнительный элемент ИЭ – это групповой переключатель, вырабатывающий дискретные сигналы. При плавном регулировании необходимо получать непрерывные сигналы, и поэтому в качестве ИЭ используют тиристорный регулятор.
В этой схеме задающий элемент представляет собой либо часть реле автоматического пуска (ускорения), либо контроллер управления или другое подобное устройство. В зависимости от типа локомотива исполнительный элемент ИЭ может быть выполнен в виде силового контроллера в комплекте с пусковым реостатом или трансформатором, либо в виде тиристорного преобразователя. Так, тиристорные преобразователи предусмотрены на электропоездах ЭР2И, ЭР12 и ЭР25 (для тормозного режима). Структура промежуточных элементов ПЭ и элементов управления УЭ зависит преимущественно от того, что представляет собой ИЭ. При ступенчатом регулировании обычно исполнительный элемент ИЭ – это групповой переключатель, вырабатывающий дискретные сигналы. При плавном регулировании необходимо получать непрерывные сигналы, и поэтому в качестве ИЭ используют тиристорный регулятор.
Автоматическая стабилизация тока, начиная со скорости v=0, неосуществима, так как необходимо сгладить первичный толчок тока. Его начальное значение устанавливают по условиям маневровой работы, а интенсивность нарастания тока – по условиям комфортабельности (рис. рис.6.27б). В начальный период пуска нарастание тока должно обеспечивать интенсивность нарастания ускорения
 м/с3.
м/с3.
Одна и та же САР ЭПС может оказывать воздействие на несколько идентичных объектов регулирования (тяговых двигателей). Решая большинство задач регулирования, их можно рассматривать как один общий объект. Однако не следует забывать о возможных различиях в характеристиках и параметрах двигателей и диаметрах колесных пар. Поэтому иногда приходится вводить в САР раздельные цепи обратной связи от каждого двигателя, а в некоторых случаях и индивидуальные элементы регулятора. Такие системы называются многоканальными.
 Многоканальные системы автоматического регулирования. Как правило, одна и та же САР ЭПС оказывает воздействие на несколько идентичных объектов регулирования – тяговых двигателей. Хотя в ряде случаев их можно рассматривать как один общий объект, имеются различия в характеристиках и параметрах двигателей, а так же в диаметрах колесных пар. Поэтому возникает необходимость вводить в систему регулирования раздельные цепи обратной связи от каждого двигателя, а в некоторых случаях и индивидуальные автоматические регуляторы. Такие индивидуальные регуляторы могут обеспечивать раздельное регулирование тока возбуждения для двигателей последовательного, независимого и смешанного возбуждения.
Многоканальные системы автоматического регулирования. Как правило, одна и та же САР ЭПС оказывает воздействие на несколько идентичных объектов регулирования – тяговых двигателей. Хотя в ряде случаев их можно рассматривать как один общий объект, имеются различия в характеристиках и параметрах двигателей, а так же в диаметрах колесных пар. Поэтому возникает необходимость вводить в систему регулирования раздельные цепи обратной связи от каждого двигателя, а в некоторых случаях и индивидуальные автоматические регуляторы. Такие индивидуальные регуляторы могут обеспечивать раздельное регулирование тока возбуждения для двигателей последовательного, независимого и смешанного возбуждения.
Рассмотрим для примера функциональную схему многоканальной САР ЭПС с индивидуальным регулированием коэффициента ослабления возбуждения тяговых двигателей последовательного возбуждения (рис. 6.28). На этой схеме исполнительный элемент ИЭ1 регулирует напряжение и на зажимах тяговых двигателей, а элементы ИЭ2-1…ИЭ2-п регулируют раздельно возбуждение двигателей путем изменения коэффициента ослабления возбуждения. Чтобы исключить влияние разброса характеристик колесно-моторных блоков, в цепь каждого из п объектов регулирования включен отдельный чувствительный элемент ЧЭ1…ЧЭп. Выходные сигналы zk этих элементов поступают на вход промежуточного элемента ПЭ2, на выходе которого формируются сигнал zб пропорциональный бóльшему значению iб из токов двигателей, и Δzk пропорциональные отклонению тока k-того двигателя от значения величины iб. Сигнал zб сравнивается в элементе сравнения с сигналом g(Iз), пропорциональным заданному значению тока.
Сигнал рассогласования с выхода элемента сравнения поступает на промежуточный элемент ПЭ1, определяющий последовательность работы управляющих и исполнительных элементов. Так, при пуске регулирование должно осуществляться вначале с помощью элемента ИЭ1 и только после выхода на автоматическую характеристику с по мощью элементов ИЭ2. Сигналы Δzk поступают параллельно с сигналом Δ на входы управляющих элементов УЭ2-1…УЭ2-п, обеспечивая выравнивание токов тяговых двигателей. Бóльшую эффективность система выравнивания может обеспечить для двигателей независимого и смешанного возбуждения.
Таким образом, применение многоканальных САР ЭПС обеспечивает равномерное распределение токов между всеми параллельно включенными тяговыми двигателями.
Системы программного регулирования ЭПС. Системы программного регулирования позволяют наиболее полно реализовать мощность тяговых двигателей в соответствии с ограничениями их режимов работы. Применяют такие системы на ЭПС с тиристорными исполнительными элементами. В качестве ограничений обычно учитываются ограничения, налагаемые на скоростную характеристику v(I): по максимальному току двигателя v(Iмакс), по сцеплению v(Iсц)), по коммутации v(ек), по реактивной ЭДС v(ер) для тяговых двигателей без компенсационной обмотки, по конструкционной скорости движения vк, а также по максимальному току возбуждения v(Iв макс) в режиме рекуперативного торможения (рис. 6.29).
В этой системе в зависимости от сигнала, пропорционального скорости движения v и поступающего на вход программного элемента ПрЭ от чувствительного элемента ЧЭ2, программный элемент определяет значение тока Iзпр, которое может быть реализовано системой стабилизации в соответствии с ограничениями на скоростную характеристику. Промежуточный элемент ПЭ сравнивает заданное значение тока, выбранное машинистом, с программным значением, выбирает наименьшее из них и вводит его в качестве задания в систему стабилизации.
Система программного регулирования одноконтурная, в ней регулирование осуществляется только по одному показателю – току тяговых двигателей, измеряемому чувствительным элементом ЧЭ1. Сигнал z2, пропорциональный скорости v, вводится в ПрЭ только для реализации ограничений на скоростную характеристику и не является отдельным сигналом обратной связи в цепи регулирования двигателей.
 Меньшее распространение на ЭПС получили системы программного регулирования, в которых заданное значение регулируемой величины – сигнал g меняется в функции пути. Такие САР применяют в метрополитенах, где изменяют величину g (в том числе отключают тяговые двигатели) по сигналам датчиков, установленных на путевой структуре.
Меньшее распространение на ЭПС получили системы программного регулирования, в которых заданное значение регулируемой величины – сигнал g меняется в функции пути. Такие САР применяют в метрополитенах, где изменяют величину g (в том числе отключают тяговые двигатели) по сигналам датчиков, установленных на путевой структуре.
Системы программного регулирования не исключают необходимости применения эффективной противобуксовочной защиты, поскольку изменение силы тяги может осуществляться на границе сил сцепления, подверженных случайным изменениям. Восстановление режима программного регулирования после срабатывания защиты должно происходить с некоторой выдержкой времени или при пониженном токе.
Системы программного регулирования ЭПС, как и системы стабилизации, целесообразно выполнять многоканальными, поскольку желательно изменять напряжение в цепи каждого двигателя, регулировать его возбуждение, а также контролировать величину протекающего по нему тока.
Функциональные схемы многоконтурных систем автоматического регулирования. Повышенные требования к точности соблюдения ограничений по скорости движения поезда и улучшения регулировочных свойств тягового электрооборудования приводят к тому, что на подвижном составе предусматривают автоматическое регулирование не только тока, но и скорости. При этом задатчик скорости ЗС (рис. 6. 30) связан со специальной рукояткой контроллера машиниста КМ, положение которой проградуировано в км/ч. Такие системы выполняют  многоконтурными с
многоконтурными с  использованием принципа подчинённого регулирования.
использованием принципа подчинённого регулирования.
Контур регулирования тока является внутренним, а контур регулирования скорости – внешним. В контуре регулирования скорости имеется управляющий элемент УЭ1, который. выполняет функции автоматического задатчика тока для внутреннего контура. Этот элемент по рассогласованию Δ1=g1–z2≡vз–v определяет уставку х1, соответствующую заданному значению тока Iз, и передаёт её на вход внутреннего контура системы. Предусмотрен также ручной задатчик тока ЭТ – вторая рукоятка КМ; этой рукояткой машинист ограничивает максимальное значение тока Iб которое может быть задано управляющим элементом УЭ1 для внутреннего контура. Фактически с помощью ЗТ машинист ограничивает пусковое ускорение в зависимости от конкретного веса поезда и от условий сцепления.
Внутренний контур работает по принципу стабилизации тока, поэтому функциональная схема его соответствует рассмотренной ранее для систем регулирования тока (см. рис. 6.27а). Двухконтурная система перспективна для электровозов и электропоездов с плавным регулированием напряжения и возбуждения тяговых двигателей. Иногда внешний контур выполняется не по принципу стабилизации скорости, а по принципу стабилизации заданного машинистом напряжения на тяговых двигателях. Такое решение объясняется тем, что напряжение на двигателях измерить проще, чем скорость поезда. Стабилизируя напряжение на двигателях, фактически стабилизируют скорость поезда. Однако погрешность в этом случае получается значительно бóльшей, чем при использовании обратной связи по скорости.
В ряде случаев может быть больше двух контуров подчинённого регулирования. Такие системы целесообразны, если нужно контролировать, кроме скорости поезда и тока двигателей, еще и пусковое ускорение, например, на электропоездах с малым коэффициентом тары. При этом предусматривают внешний контур для регулирования скорости, внутренний – для тока и промежуточный – для ускорения.
Более двух контуров обычно предусматривают также для регулирования электроприводов с независимым возбуждением тяговых двигателей, где дополнительной регулируемым параметром является ток возбуждения. Подобная система используется на электровозах ВЛ12.
 Другая особенность практического исполнения двухконтурных систем рассматриваемого типа на ЭПС связана с наличием в составе каждого электропоезда нескольких моторных вагонов, а в составе электровоза – нескольких секций. Таким образом, приходится иметь дело с несколькими независимыми группами тяговых двигателей, для каждой из которых предусматривают свой контур регулирования тока. Внешний контур, т. е. контур регулирования скорости, является общим для всех параллельно работающих внутренних контуров, а уставка g2 тока Iб – общей для всех внутренних контуров. Такая многоконтурная система наряду с использованием принципа подчиненного регулиро-вания содержит параллельные независимые внутренние контуры.
Другая особенность практического исполнения двухконтурных систем рассматриваемого типа на ЭПС связана с наличием в составе каждого электропоезда нескольких моторных вагонов, а в составе электровоза – нескольких секций. Таким образом, приходится иметь дело с несколькими независимыми группами тяговых двигателей, для каждой из которых предусматривают свой контур регулирования тока. Внешний контур, т. е. контур регулирования скорости, является общим для всех параллельно работающих внутренних контуров, а уставка g2 тока Iб – общей для всех внутренних контуров. Такая многоконтурная система наряду с использованием принципа подчиненного регулиро-вания содержит параллельные независимые внутренние контуры.
В качестве примера рассмотрим упрощенную схему системы автоматического управления реостатным торможением на электровозе ВЛ8ОТ (рис. 6.31а). На этой схеме составные части автоматического регулятора изобра-жены в виде функциональных элементов, а силовые цепи электровоза для режима реостатного торможения показаны полностью. Тяговые двигатели включены по схеме независимого возбуждения, в которой ток обмоток ОВ1…ОВ4 регулируют исполнительным элементом ИЭ – управляемым выпрямителем. Якори двигателей М1…М4 подключены к индивидуальным тормозным резисторам R1…R4.
Режимом реостатного торможения машинист управляет с помощью специальной (тормозной) рукоятки главного контроллера, которая имеет следующие положения: 0 – нулевое, П – подготовительное, ПТ – предварительное торможение и Т – торможение. При работе электровоза в режимах тяги или выбега, а также при пневматическом торможении и на стоянке эта рукоятка должна находиться в нулевом положений. Для перехода в режим реостатного торможения машинист устанавливает рукоятку сначала в подготовительное положение. При этом собирается схема, соответствующая рис. 6.31а, но ток возбуждения ещё не протекает.
Тормозная система приходит в действие в положении ПТ с небольшим тормозным усилием (около 100 кН на электровоз), чтобы сжать поезд. Положению Т соответствует определенная зона возможных позиций рукоятки, которая выполняет функции задатчика скорости поезда ЗЭ1. Выходной сигнал g1 этого задатчика пропорционален заданной скорости. Система регулирования позволяет реализовать режим поддержания заданной скорости поезда на спуске, а также режим остановочного торможения. В последнем случае машинист устанавливает тормозную рукоятку ЗЭ1 в зоне Т в положение, соответствующее минимальной заданной скорости vз мин.
Во внешнем контуре регулирования скорости вычислительным элементом ВЭ осуществляется косвенное автоматическое задание силы торможения в функции рассогласования по скорости через ток якоря и ток возбуждения, заданные значения которых в виде сигналов g3≡Iяб и g4≡Iвб вводятся во внутренний контур регулирования. Максимальное тормозное усилие, пропорциональное Iяб и Iвб, задается машинистом с помощью 12-типозиционного переключателя ЗЭ2. Это позволяет вводить в систему различные предельные значения тормозного усилия (от 150 до 550 кН) в виде сигнала g2, с учётом условий сцепления и веса поезда.
В случае превышения заданной скорости система реализует предельную тормозную силу, стремясь снизить скорость поезда. Если скорость поезда стала ниже заданной vз (например, при уменьшении уклона), то система уменьшит тормозную силу, стремясь задержать снижение скорости.
Значение тормозной силы, заданное внешним контуром, реализуется во внутреннем контуре следующим образом. В момент включения реостатного тормоза все рассогласования во внутреннем контуре положительны. Поэтому исполнительный элемент ИЭ по сигналам управляющего элемента УЭ постепенно увеличивает ток возбуждения до тех пор, пока не будет зафиксировано превышение одного из предельных значений для двух регулируемых величин – тока якоря или тока возбуждения, а, следовательно, и тормозной силы.
 В зоне низких скоростей (до 25 км/ч) первым будет достигнуто ограничение по току возбуждения (рис. 6.31б). При этом канал стабилизации тока возбуждения (рис 6.32а) станет поддерживать ток возбуждения на постоянном уровне, соответствующем ограничению по нагреву при длительном режиме. В зоне средних скоростей (25…65 км/ч) действует ограничение по сцеплению колес с рельсами, которое можно было бы реализовать с помощью чувствительного элемента, измеряющего тормозную силу. Так как непосредственно измерить эту силу трудно, то на электровозе ВЛ80Т ограничение по сцеплению Всц(v) реализуется косвенным путем. Зависимость предельной тормозной силы от скорости (см. рис. 6.31б) пересчитана для постоянного сопротивления тормозного реостата в зависимость I′яз(Iв), которая реализована нелинейным функциональным преобразователем ФП, подключённым к датчику тока возбуждения ЧЭ5 (рис. 6.32б). При этом система работает в режиме ограничения тока якоря в. соответствии со значением I′яз от блока ФП.
В зоне низких скоростей (до 25 км/ч) первым будет достигнуто ограничение по току возбуждения (рис. 6.31б). При этом канал стабилизации тока возбуждения (рис 6.32а) станет поддерживать ток возбуждения на постоянном уровне, соответствующем ограничению по нагреву при длительном режиме. В зоне средних скоростей (25…65 км/ч) действует ограничение по сцеплению колес с рельсами, которое можно было бы реализовать с помощью чувствительного элемента, измеряющего тормозную силу. Так как непосредственно измерить эту силу трудно, то на электровозе ВЛ80Т ограничение по сцеплению Всц(v) реализуется косвенным путем. Зависимость предельной тормозной силы от скорости (см. рис. 6.31б) пересчитана для постоянного сопротивления тормозного реостата в зависимость I′яз(Iв), которая реализована нелинейным функциональным преобразователем ФП, подключённым к датчику тока возбуждения ЧЭ5 (рис. 6.32б). При этом система работает в режиме ограничения тока якоря в. соответствии со значением I′яз от блока ФП.
При скоростях выше 65 км/ч система обеспечивает ограничение тока якоря на заданном постоянном уровне – предельное значение 950 А (рис. 6.32в), а другие каналы регулирования не работают, так как при этом ограничения по току возбуждения и по сцеплению не достигаются. Величина Iяз устанавливается по перегрузочной способности машины.

 САР скорости ЭПС с релейно-контакторной системой управления. Регулирование скорости ЭПС может быть осуществлено с использованием широко распространенных групповых переключателей (рис. 6.33). Здесь УЭ преобразует рассогласование Δ=g – z1 + z2 в номер позиции N группового переключателя. Введение в цепь обратной связи этой функциональной схемы, помимо ЧЭ1, измеряющего скорость движения, еще одного чувствительного элемента ЧЭ2, сигнал z2 на выходе которого пропорционален ускорению, позволяет улучшить работу схемы при управлении таким инерционным объектом, как поезд. Данная схема разработана для эксплуатируемого ЭПС с резисторно-контакторными системами управления. Ей присущи следующие недостатки:
САР скорости ЭПС с релейно-контакторной системой управления. Регулирование скорости ЭПС может быть осуществлено с использованием широко распространенных групповых переключателей (рис. 6.33). Здесь УЭ преобразует рассогласование Δ=g – z1 + z2 в номер позиции N группового переключателя. Введение в цепь обратной связи этой функциональной схемы, помимо ЧЭ1, измеряющего скорость движения, еще одного чувствительного элемента ЧЭ2, сигнал z2 на выходе которого пропорционален ускорению, позволяет улучшить работу схемы при управлении таким инерционным объектом, как поезд. Данная схема разработана для эксплуатируемого ЭПС с резисторно-контакторными системами управления. Ей присущи следующие недостатки:
– отсутствие контроля тока тяговых двигателей;
– снижение значения реализованной силы тяги;
– повышение расхода энергии на тягу вследствие появления дополнительных потерь энергии на коммутацию.
САР ЭПС с тиристорными преобразователями. Наиболее перспективными системами автоматического регулирования ЭПС являются многоконтурные САР с использованием в качестве исполнительного элемента тиристорного преобразователя.
Функциональная схема системы автоматического управления электровоза ВЛ85, реализованная в виде блока автоматического управления типа БАУ-250, представляет собой систему автоматического регулирования режимов тяги и рекуперативного торможения и позволяет выполнять управление электровозами по системе многих единиц. Она выполнена как многоконтурная система подчинённого регулирования, причем в режиме тяги она работает как двухконтурная с контурами регулирования скорости и тока, а в режиме рекуперации – как трехконтурная с контурами регулирования скорости v, силы тяги Fк (торможения Вк) и тока возбуждения iв.
 В режиме тяги функциональная схема (рис. 6.34а) включает в себя задатчики тока ЗТ и скорости ЗС контроллера машиниста КМ, регулятор скорости РС, промежуточный элемент ИЛИ1–min, элемент ограничения тока якоря ОТЯ, задатчик интенсивности ЗИ1, регулятор тока якоря РТЯ, согласующий элемент СЭ1, исполнительный элемент ИЭ1 – четырёхзонный выпрямительно-инверторный преобразователь типа ВИП-4000, объекты регулирования – ОР1, представляющий собой цепь выпрямленного тока электровоза, ОР2, выполняющий преобразование тока в силу тяги электровоза, и ОР4, отображающий механическую часть электровоза и поезда.
В режиме тяги функциональная схема (рис. 6.34а) включает в себя задатчики тока ЗТ и скорости ЗС контроллера машиниста КМ, регулятор скорости РС, промежуточный элемент ИЛИ1–min, элемент ограничения тока якоря ОТЯ, задатчик интенсивности ЗИ1, регулятор тока якоря РТЯ, согласующий элемент СЭ1, исполнительный элемент ИЭ1 – четырёхзонный выпрямительно-инверторный преобразователь типа ВИП-4000, объекты регулирования – ОР1, представляющий собой цепь выпрямленного тока электровоза, ОР2, выполняющий преобразование тока в силу тяги электровоза, и ОР4, отображающий механическую часть электровоза и поезда.
При пуске заданное значение тока якоря iя через элементы ИЛИ1–min, ОТЯ и ЗИ1 поступает на элемент сравнения ЭС1. Элемент ЗИ1 обеспечивает плавное увеличение заданного значения тока до значения, соответствующего положению рукоятки ЭТ. Рассогласование Δ2 между сигналами, пропорциональными заданному и текущему значениям тока двигателя, отрабатывается регулятором РТЯ, работающим в режиме стабилизации. Такая структура системы обеспечивает разгон электровоза с заданным ЗТ значением тока тяговых двигателей до заданного ЗС значения скорости движения. После этого САР переходит в режим стабилизации скорости. В этом режиме задание тока якоря определяется регулятором скорости РС, что обеспечено включением в схему элемента ИЛИ1–min, пропускающего на свой выход минимальный из входных сигналов. Поскольку при пуске фактическое значение скорости всегда меньше заданного, сигнал на выходе РС всегда больше, чем сигнал на выходе ЗТ. Поэтому в режиме пуска эта САР работает как одноконтурная система стабилизации тока. После достижения заданной скорости движения сигнал на выходе РС становится меньше сигнала на выходе ЗТ и САР начинает работать как двухконтурная.
Элемент СЭ1 обеспечивает согласование сигналов РТЯ и управляющего элемента УЭ1, в качестве которого использованы соответствующие элементы блока управления выпрямительно-инверторным преобразователем типа БУВИП-1З3. При увеличении угла регулирования αр и, следовательно, повышении напряжения ик до максимального значения и при наличии положительного рассогласования по скорости Δ2>0 согласующий элемент СЭ1 формирует сигнал на включение регулятора магнитодвижущей силы Рмдс, который выполняет ступенчатое шунтирование обмотки возбуждения тягового двигателя с помощью включения соответствующих контакторов. Элемент ОТЯ ограничивает ток якоря допустимым максимальным значением Iмакс.
В режиме рекуперативного торможения в ВАУ-250 применена трёхконтурная САР, осуществляющая регулирование скорости движения v электровоза, силы торможения Вк и тока возбуждения iв (рис. 6.34б). В её состав входят задатчики силы торможения ЗСТ и скорости ЗС контроллера машиниста КМ, регулятор скорости РС, элемент ИЛИ2–min, ограничитель тока якоря ОТЯ, задатчик интенсивности ЗИ2, регулятор силы торможения РСТ, нелинейный преобразователь НП, регулятор тока возбуждения РТВ, элемент ограничения силы торможения по коммутации ОСТ, исполнительные элементы ИЭ1, ИЭ2 и объекты регулирования ОР1…0Р4. В качестве ИЭ2 использована выпрямительная установка возбуждения типа ВУВ-ОО1.
Контуры регулирования тока возбуждения и силы торможения являются внутренними, а контур регулирования скорости – внешним. Нелинейный преобразователь НП осуществляет разделение каналов управления током якоря iя и током возбуждения iв следующим образом: до значения тока возбуждения тяговых двигателей, равного 880 А, регулирование тормозной силы осуществляется изменением тока возбуждения тяговых двигателей, а при токе возбуждения. равном 880 А, регулирование осуществляется путем изменения ЭДС силового трансформатора при постоянстве тока возбуждения. Управление исполнительными элементами ИЭ1 и ИЭ2 осуществляется через согласующие элементы СЭ1, СЭ2 и управляющие элементы УЭ1 и УЭ2. В качестве последних также использованы элементы БУВИП- 133.
Элемент ОСТ выполняет простейший алгоритм ограничения по коммутации на основе соотношения iв/iя = 0,43. Сигнал с выхода ОСТ вместе с сигналами с выхода РС и ЗСТ поступают на вход ИЛИ2–min, который пропускает на свой выход минимальный из этих трёх сигналов. Это обеспечивает реализацию наименьшего значения тормозной силы, необходимой в данных условиях движения.
Таким образом, САР электровоза ВЛ85 частично выполняет и функции программной системы (см. рис. 6.29), осуществляя ограничения по максимальному току якоря и по коммутации. Отметим, что последнее ограничение реализовано упрощенно без учета зависимости ЭДС ек от скорости движения.
В целом блок автоматического управления электровозом ВЛ85 обеспечивает в тяговом режиме стабилизацию тока тяговых двигателей и скорости движения электровоза, а в рекуперативном режиме остановочное торможение с заданным значением тормозной силы, плавное нарастание тормозной силы, изменение значения силы предварительного торможения в зависимости от скорости движения электровоза.
 САР угла запаса инвертора. Важным узлом системы управления электровозов ВЛ8ОР и ВЛ85 является система автоматического регулирования угла запаса инвертора типа БРУЗ. Эта система обеспечивает регулирование угла запаса инвертора по условию δ≥ δз (δз – минимально допустимое значение угла запаса).
САР угла запаса инвертора. Важным узлом системы управления электровозов ВЛ8ОР и ВЛ85 является система автоматического регулирования угла запаса инвертора типа БРУЗ. Эта система обеспечивает регулирование угла запаса инвертора по условию δ≥ δз (δз – минимально допустимое значение угла запаса).
Увеличение δз ухудшает коэффициент мощности электровоза. Для повышения коэффициента мощности стремятся уменьшить δз ‚ однако при этом снижается устойчивость инвертора от опрокидывания. В связи с этим система БРУЗ должна быть достаточно совершенной, чтобы обеспечить одновременное выполнение этих противоречивых требований.
Известно, что в процессе рекуперативного торможения величина δ зависит от угла коммутации γ (рис. 6.35):
δ =π – αβ – γ,
где αβ – угол отпирания вентилей.
Угол γ связан следующими соотношениями с током рекуперации Iр, амплитудой напряжения на вторичной обмотке трансформатора Um индуктивным сопротивлением контура коммутации выпрямителя Хт и углом αβ:
 .
.
При изменении любого из аргументов Хт, Iр, Um или αβ величина γ, а следовательно, и δ будут меняться. В системах автоматики типа БРУЗ реализовано регулирование по разомкнутому циклу, при котором управляющий сигнал αβ формируется по закону:
 , (6.1)
, (6.1)
где i = 1, 2…п – номер полупериода питающего напряжения.
Здесь суммирование заменяет операцию интегрирования, так как сигнал γi является дискретным и характеризует длительность процесса коммутации выпрямителя в каждый полупериод. При этом введение в закон управления операции суммирования эквивалентно управлению по среднему значению угла γ.
Автоматическое регулирование выпрямителя по закону (6.1) в режиме рекуперации выполняется в дополнение к регулированию угла αр. Для этого функциональную схему (см. рис. 6.34б) необходимо дополнить регулированием по углу αβ. Следует иметь в виду, что объектом регулирования в данном случае является выпрямительно-инверторный преобразователь, т.е. исполнительный элемент ИЭ1 функциональной схемы, приведенной на рис. 6.34б. Таким образом, на исполнительный элемент ИЭ (рис. 6.35а) в режиме рекуперации поступают два управляющих сигнала: αр регулирующий значения выпрямленного напряжения иd и напряжения на зажимах двигателя  , и αβ, обеспечивающий регулирование по закону (6.1).
, и αβ, обеспечивающий регулирование по закону (6.1).
Чувствительный элемент ЧЭγ выделяет из кривой тока i2 вторичной обмотки трансформатора импульс напряжения и(γ), длительность которого пропорциональна углу коммутации. Этот сигнал в регуляторе Рγ складывается в соответствии с законом (6.1) с сигналами и(γ), полученными в предыдущие полупериоды, а затем в элементе сравнения ЭС5 образуется сигнал и(αβ). Преобразование последнего в импульс отпирания тиристоров, формируемый в момент  , выполняется специальным управляющим элементом УЭ3, входящим в состав БУВИП.
, выполняется специальным управляющим элементом УЭ3, входящим в состав БУВИП.
Как видно из рис. 6.36а, регулируемая величина – угол запаса непосредственно не измеряется и цепь обратной связи по отсутствует, поэтому такая САР является разомкнутой. В последнее время появились замкнутые системы регулирования выпрямителя по углу запаса с, так называемой, вольт-секундной величине запаса:
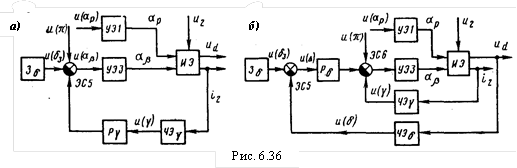
 ,
,
 а также по энергии за время коммутации и запаса. В функцио-нальной схеме простейшей из таких систем – замкнутой САР стабилизации угла запаса (рис. 6.36б) применены два чувствительных элемента, выделяющих сигналы, пропорци-ональные углам γ и δ, а также регулятор угла запаса Рδ рабо-тающий по отклонению Δ= δз – δ.
а также по энергии за время коммутации и запаса. В функцио-нальной схеме простейшей из таких систем – замкнутой САР стабилизации угла запаса (рис. 6.36б) применены два чувствительных элемента, выделяющих сигналы, пропорци-ональные углам γ и δ, а также регулятор угла запаса Рδ рабо-тающий по отклонению Δ= δз – δ.
Аналогичная многокон-турная система использована на электро возах ВЛ80Т и ВЛ80С для регулирования реостатного торможения (рис. 6.37). Поскольку конкретная реализация этой системы на указанных электровозах имеет некоторые отличия, обусловленные, на пример, режимом многих единиц на электровозе ВЛ8ОС, то далее эта система рассмотрена применительно к ВЛ80С.
Машинист управляет процессом реостатного торможения с помощью следующих задающих элементов контроллера машиниста КМ:
задатчиков скорости ЗС и тормозной силы ЗТС. Последний имеет четыре положения: 0 – нулевое, П – подготовка тормозной схемы к включению, ПТ – предварительное торможение с усилием 98 кН, Т – торможение с максимальным тормозным усилием.
В системе использованы сигналы обратной связи по току возбуждения iв от ЧЭ3, по току якорных обмоток iя от ЧЭ2 и по скорости движения v от ЧЭ1. Таким образом, нормально система работает как трёхконтурная с подчиненным регулированием. Тяговые двигатели включены по схеме независимого возбуждения: якорная обмотка каждого двигателя нагружена на свой тормозной резистор, а все обмотки возбуждения соединены последовательно и питаются от ИЭ – управляемого выпрямителя ВУВ. Контур возбуждения может рассматриваться как объект регулирования ОР1, контур с якорными обмотками и тормозными резисторами – как ОР2. Электровоз с поездом образуют ОР3, выходной параметр – скорость v.
Элемент сравнения ЭС1 определяет рассогласование Δ1 по скорости, поступающее в регулятор скорости РС, который работает совместно с блоком ограничений токов якоря и возбуждения БОТ. Последний реализует функции программного ограничения.
При Δ1>0, если ЗТС находится в положении Т, реализуется максимально возможный в данных условиях режим торможения. В диапазоне скоростей 90…110 км/ч тормозная сила ограничивается потенциальными условиями на коллекторе тягового двигателя. При этом БОТ задает в функции v программу изменения Iяз и Iвз. Поскольку сопротивление тормозных резисторов постоянно, достаточно задать только программу Iяз(v).
В диапазоне 60…90 км/ч действует ограничение по мощности рассеиваемой на тормозном резисторе теплоты. При этом БОТ ограничивает ток Iяз на уровне 830А. При скорости ниже 60 км/ч действует ограничение по току возбуждения 1100 А. Это значение может быть выдержано двигателями не более 20 мин, что достаточно для режима остановочного торможения поезда.
Таким образом, РС совместно с БОТ реализует функции программного регулирования в случае, если Δ1>0. При Δ1≤0, т. е. при снижении скорости ниже заданной, что имеет место в результате интенсивного торможения, РС переводит систему в режим подтормаживания с усилием 98 кН, чтобы избежать толчков в поезде. Такой же режим реализуется при установке рукоятки ЗТС в положение ПТ.
Функции РС и БОТ сводятся к тому, чтобы задать значения Iяз и Iвз, поступающие на элементы сравнения ЭС2 и ЭСЗ. Соответствующие рассогласования являются входными сигналами для регулятора Р, в качестве которого используется функциональный преобразователь с решающим устройством. Последний формирует управляющий сигнал х в зависимости от сигналов Δ2 и Δ3, а также выполняет функции задатчика интенсивности. Управляющий элемент УЭ осуществляет включение тиристоров в выпрямителе ВУВ, который питает обмотки возбуждения.
Предусмотрен ещё ряд блоков, имеющих вспомогательное назначение. В частности, по мере снижения скорости до 35 км/ч происходит переключение тормозных резисторов с уменьшением сопротивления с 1 до 0,54 Ом. При отказе реостатного тормоза, т.е. при iя=0, автоматически происходит включение пневматического тормоза.
 Многоконтурные САР ЭПС с тяговыми двигателями независимого возбуждения. Применение независимого возбуждения тяговых двигателей приводит к появлению в составе САР трех контуров регулирования: скорости движения (внешний), токов якоря и возбуждения (внутренние). Взаимодействие между этими внутренними контурами может быть организовано по-разному. Так, на рис. 6.38а показана функциональная схема, согласно которой соотношение между заданными сигналами, пропорциональными токам якоря g2 и возбуждения g3, определяется регулятором скорости РС. Это соотношение может обеспечивать минимальный расход энергии на тягу поездов или максимум КПД тягового двигателя. Первое условие реализуется, если при пуске сигнал g3 пропорционален наибольшему возможному току возбуждения, а сигнал g2 плавно увеличивается от нуля до наибольшего допустимого значения gб, поступающего от задатчика тока ЗТ.
Многоконтурные САР ЭПС с тяговыми двигателями независимого возбуждения. Применение независимого возбуждения тяговых двигателей приводит к появлению в составе САР трех контуров регулирования: скорости движения (внешний), токов якоря и возбуждения (внутренние). Взаимодействие между этими внутренними контурами может быть организовано по-разному. Так, на рис. 6.38а показана функциональная схема, согласно которой соотношение между заданными сигналами, пропорциональными токам якоря g2 и возбуждения g3, определяется регулятором скорости РС. Это соотношение может обеспечивать минимальный расход энергии на тягу поездов или максимум КПД тягового двигателя. Первое условие реализуется, если при пуске сигнал g3 пропорционален наибольшему возможному току возбуждения, а сигнал g2 плавно увеличивается от нуля до наибольшего допустимого значения gб, поступающего от задатчика тока ЗТ.
После того, как в процессе работы к тяговому двигателю будет приложено максимальное напряжение икб, на другом выходе РТЯ появится сигнал х2б. Дальнейшее регулирование будет выполняться регулятором магнитодвижущей силы Рмдс, уменьшающим сигнал на величину сигнала коррекции хк.
Другой принцип управления реализован в функциональной схеме, приведенной на рис. 6.38б. В соответствии с этой схемой заданное значение тока возбуждения формируется регулятором тока якоря и при пуске может соответствовать максимальному значению тока возбуждения. После того, как в процессе регулирования к тяговому двигателю будет приложено максимальное напряжение икб, происходит изменение структуры САР. Канал воздействия на УЭ1 отключается и РТЯ начинает уменьшать сигнал g3, пропорциональный заданному значению тока якоря, так, чтобы обеспечить уменьшение м.д.с. обмотки возбуждения. При этом контур регулирования тока возбуждения оказывается внутренним по отношению к контуру регулирования тока якоря, так как изменение iв происходит так, чтобы выровнять его с током якоря. Таким образом, САР будет иметь три последовательно подчиненных контура регулирования.
В схемах, приведённых на рис. 6.38, программный элемент ПрЭ обеспечивает реализацию ограничений скоростной характеристики тягового двигателя. Кроме того, в этих схемах вместо задатчика тока ЗТ могут быть использованы задатчики силы тяги ЗСТ, массы поезда ЗМ и режима работы ЗР, с помощью которых машинист может вводить наибольшую допустимую силу тяги Fкб, значение массы поезда т из натурного листа и выбирать в зависимости от профиля пути момент перехода из режима тяги в режим рекуперации. В этом случае интенсивность изменения задающих сигналов g2 и g3 определяется непосредственно РС в зависимости от значений величин Fкб и т.
 Адаптивные САР электропоездов. Изменение загрузки вагона электропоезда пассажирами ведёт к изменению условий сцепления и повышает вероятность возникновения аварийных режимов: буксования и юза. Для предупреждения возникновения аварийных режимов САР электропоездов целесообразно выполнять с адаптацией к условиям сцепления. Такие САР выполнены одноконтурными с регулированием по току двигателя (рис. 6.39). Помимо чувствительного элемента ЧЭ1, измеряющего этот ток, они оборудованы элементами ЧЭ2…ЧЭ5, измеряю-щими соответственно скорость движения v, влажность окружаю-щего воздуха Вл, загрузку вагона пассажирами mп, определяемую по прогибу второй ступени рессорного подвешивания, и напряжение ик на зажимах двигателя.
Адаптивные САР электропоездов. Изменение загрузки вагона электропоезда пассажирами ведёт к изменению условий сцепления и повышает вероятность возникновения аварийных режимов: буксования и юза. Для предупреждения возникновения аварийных режимов САР электропоездов целесообразно выполнять с адаптацией к условиям сцепления. Такие САР выполнены одноконтурными с регулированием по току двигателя (рис. 6.39). Помимо чувствительного элемента ЧЭ1, измеряющего этот ток, они оборудованы элементами ЧЭ2…ЧЭ5, измеряю-щими соответственно скорость движения v, влажность окружаю-щего воздуха Вл, загрузку вагона пассажирами mп, определяемую по прогибу второй ступени рессорного подвешивания, и напряжение ик на зажимах двигателя.
Адаптер А на основе заложенных в его память зависимо-стей вычисляет зна-чение коэффициента сцепления ψк по значениям скорости (сигнал z2) и влажности (сигнал z3). Затем он определяет допустимую силу тяги Fкб≡mпψк и по электротяговой характеристике находит минимально допустимый ток, которому соответствует сигнал g1*. Промежуточный элемент ПЭ пропускает на свой выход минимальный g1 min из входных сигналов. Этот сигнал является задающим для контура регулирования тока тягового двигателя, выполненного по типовой схеме системы стабилизации. При этом в качестве исполнительного элемента ИЭ на электропоезде ЭР2Р используется реостатный контроллер.
В тормозном режиме функции регулирования усложняются. Для их реализации предусмотрен блок программных ограничений и переключений БПОП. Этот блок воздействует на ПЭ и ИЭ, в качестве которого используют либо реостатный контроллер, либо выпрямитель питания цепей возбуждения. На БПОП поступают сигналы z1, z2 и z5, пропорциональные соответственно величинам i, v и ик, а так же сигнал g2 от задатчика режимов ЗР, характеризующий режим работы электропоезда (тяга или торможение). В зоне высоких скоростей с помощью БПОП реализуется рекуперативное торможение, а при отсутствии потребителя энергии и в зоне низких скоростей – реостатное. Кроме того, по сигналу БПОП выполняется переход от реостатного торможения к механическому (электропневматическому).
Люди также интересуются этой лекцией: 1 Введение.
На отечественных электропоездах ЭР2Р, ЭР12, ЭР29, ЭР30используется вариант схемы, приведенной на рис. 6.39, с адаптацией только по загрузке вагона без учета влажности окружающего воздуха.
Адаптация САР к меняющимся условиям сцепления может быть выполнена по принципу самообучающихся систем. Для этого при каждом i-том пуске мотор-вагонного поезда регистрируют количество пi срывов сцепления, например, по срабатываниям реле буксования на моторных вагонах. Затем перед следующим (i+1) пуском анализируется полученное значение пi, сравнивется с фиксированными значениями п1, п2. Если пi<п1, то увеличивают Iз i+1 на некоторое заданное значение ΔI. При пi>п1 уменьшают Iз i+1 на ΔI, а при п1<пi<п2 не меняют Iз i+1.
Могут быть использованы и более сложные алгоритмы адаптации, учитывающие не только i-тый, но и несколько предыдущих пусков.
Большое значение для обеспечения надежной работы тяговых двигателей имеют системы автоматизации, применяемые на электровозах постоянного тока, Работающих в рекуперативном режиме. Если в качестве исполнительного элемента использован статический преобразователь для питания обмоток возбуждения (электровозы ВЛ11, ВЛ15), выполняемый обычно по схеме «автономный инвертор – трансформатор – управляемый выпрямитель», то система рекуперации нуждается в быстродействующем регуляторе для стабилизации тормозного тока при скачках напряжения в контактной сети. Этот же регулятор выполняет функции программного ограничения тока во всем диапазоне скоростей, в котором применяют рекуперацию. Такой регулятор обычно выполняется по одноконтурной схеме с обратной связью по току рекуперации. На входе элемента сравнения установлен блок программного ограничения Iз(v). Этот блок реализует зависимость предельно допустимого тока якорных обмоток двигателей от скорости. Соответствующую зависимость рассчитывают заранее, принимая во внимание ограничение по потенциальным условиям на коллекторе (в зоне высоких скоростей) и ограничение по сцеплению (в зоне средних скоростей). Наряду с характеристикой Iз(v) в блок программного ограничения закладывается и ряд частных характеристик для пониженного коэффициента сцепления. Машинист выбирает нужную характеристику с помощью рукоятки контроллера.
По сравнению с классической схемой одноконтурной системы программного регулирования (см. рис. 6.29а) схема, применяемая на электровозах, выполняет еще и функцию отключения рекуперативного тормоза при достижении предельного значения тока возбуждения, что имеет место при снижения скорости до 25…20 км/ч. При дальнейшем снижении скорости электровоза, например, на горизонтальном участке пути ток возбуждения может лишь ограничиваться на максимально допустимом уровне, а ток якорных обмоток ввиду большой жесткости характеристик независимого возбуждения будет резко спадать, вызывая переход двигателя в тяговый режим. Поэтому при Iв = Iвmax срабатывает защита, осуществляющая плавный переход на пневматическое торможение.
Еще одна особенность рассматриваемого регулятора связана с наличием нескольких параллельных цепей тяговых двигателей. Эти цепи, каждая из которых имеет свой независимый регулятор, связаны между собой через источник питания. Например, увеличение тока в любой цепи вызывает повышение напряжения на токоприемнике и соответственно уменьшение тока в остальных цепях. При этом система может оказаться неустойчивой и склонной к автоколебаниям. По этому регуляторы параллельных цепей дополняются системой выравнивания токов. Она выполняется по принципу выделения экстремального значения тока с регулированием по этому экстремальному значению, т.е. токи других цепей выравнивают по отношению к экстремальному значению. При этом одноконтурная система дополняется элементами, которые выбирают максимальное или минимальное значение тока.



















