
Динамические свойства систем автоматического регулирования двс
7. Динамические свойства систем автоматического регулирования двс.
7.1. Регуляторные характеристики двигателей.
Система автоматического регулирования (САР) (рис. 7.1) называется совокупность взаимодействующих в процессе работы элементов (двигателя 2 и регулятора 1), предназначенных для поддержания в заданных пределах значений регулируемого параметра (частоты вращения, температуры, давления и т.д.). Функциональная схема такой системы представлена на рис 1.2, с. Классификация САР двигателей оказывается наиболее удобной, если основным признаком для классификации принять тип установленного на двигателе регулятора.
Статические свойства САР определяются регуляторными характеристиками (см. рис. 4.3,б; 4.6,б; 5.2а), которые при установке регуляторов на двигателе, (в частности, автоматического регулятора частоты вращения) представляют собой зависимости характеристик двигателя от частоты вращения (угловой скорости) коленчатого вала. Такими характеристиками могут быть: эффективная мощность  , крутящий момент
, крутящий момент  или среднее эффективное давление
или среднее эффективное давление  , при условии, что они определяются установленным на двигателе автоматическим регулятором при выбранном положении органа управления двигателем в пределах от полной подачи топлива до подачи холостого хода. Следовательно, регуляторной характеристикой двигателя является совокупность установившихся (равновесных) режимов работы САР двигателя при различных нагрузках и при определенной настройке автоматического регулятора.
, при условии, что они определяются установленным на двигателе автоматическим регулятором при выбранном положении органа управления двигателем в пределах от полной подачи топлива до подачи холостого хода. Следовательно, регуляторной характеристикой двигателя является совокупность установившихся (равновесных) режимов работы САР двигателя при различных нагрузках и при определенной настройке автоматического регулятора.
Регуляторная характеристика двигателя может быть построена, если известны скоростные характеристики двигателя, (например M = f (ω)) при постоянных положениях h рейки топливного насоса (квадрант I на рис. 7.2, кривые 1 - 4) и равновесные кривые (см. рис. 4.2) регулятора (квадрант III на рис. 7.2, кривые 6 – 10). В квадрантах II и IV наносятся прямые 5 и 11, характеризующие передаточные отношения механизмов, связывающих двигатель и регулятор, причем прямая h = f (z) учитывает наличие в системе главной отрицательной обратной связи (по мере увеличения z рейка должна перемещаться в сторону уменьшения подачи топлива).
После выбора равновесной кривой (например, 8) с предварительной деформацией пружины d2 на оси ординат в квадранте IV отмечаются значения hk (h4, h3 и т.д.), соответствующие скоростным характеристикам двигателя (точки A, B, C и др.). Полученные точки проецируются на равновесную кривую (точки Aр, Вр, Ср), а затем на скоростные характеристики двигателя. Соединение точек Ад, Вд, Сд кривой и дает регуляторную характеристику 12 двигателя.
Статизм регуляторной характеристики определяется степенью неравномерности δ, и для статических характеристик имеем: δ > 0.
Уменьшение диапазона изменения угловой скорости в пределах одной регуляторной характеристики приближает статические характеристики к астатическим. При астатических регуляторных характеристиках значение: δ = 0. Отклонение регуляторной характеристики от прямолинейной формы оценивают степенью непрямолинейности
Рекомендуемые материалы
 (7.1)
(7.1)
где ωном – угловая скорость при номинальном режиме работы двигателя; ω1 ,ω2 – точки пересечения (с абсциссой) хорды и параллельной ей касательной, проведенных к регуляторной характеристике.
|
|
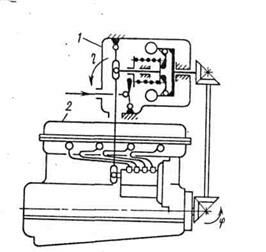
Рис. 7.1. Система автоматического регулирования частоты вращения коленчатого вала с регулятором прямого действия
|
|
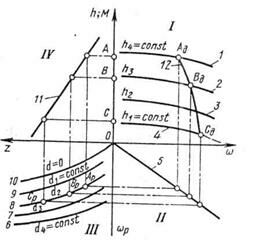
Рис. 7.2. Построение регуляторной характеристики двигателя
7.2. Дифференциальные уравнения САР.
Статические свойства САР определяются совокупностью регуляторных характеристик, соответствующих заданным техническим условиям (степени неравномерности, непрямолинейности, нечувствительности и т.д.). Точки регуляторных характеристик определяют соответствующие установившиеся (равновесные) режимы, при которых положение муфты регулятора всегда соответствует значению заданной угловой скорости.
Однако изменения нагрузки на двигатель или настройки регулятора нарушают эти соответствия, появляются переходные процессы, характер которых определяется динамическими свойствами САР при неустановившихся (неравновесных) режимах работы. Таким образом, оценить динамические свойства САР можно путем исследования переходных процессов. При таких исследованиях, прежде всего, оценивается устойчивость системы регулирования, т.е. ее способность обеспечивать установление и поддержание заданного нового положения равновесия.
Однако если новое положение равновесия устанавливается регулятором лишь через значительный интервал времени или если в течение переходного процесса проявляются недопустимо большие отклонения (забросы) от положения равновесия, то работу такого регулятора нельзя признать удовлетворительной. Эти обстоятельства выдвигают вторую задачу исследования – выявление качества переходного процесса.
Третьей задачей исследований динамических свойств САР является определение таких параметров регулятора, которые при заданном регулируемом объекте обеспечивали бы заданные параметры качества процессов. Эта задача по существу является задачей синтеза САР.
Система автоматического регулирования прямого или непрямого действия сможет выполнять возложенные на нее функции, если ее элементы (двигатель и регулятор) соединены в последовательную цепь взаимодействия с выполнением условия главной отрицательной обратной связи (3.3), которое для системы непрямого регулирования имеет вид:
η = − χ (7.2)
Таким образом, для получения представления о динамических свойствах САР необходимо совместно решить дифференциальные уравнения: двигателя – (1.25) или (2.14); автоматического регулятора прямого действия (его чувствительного элемента) – (6.13); и главной отрицательной обратной связи (7.2). Так, например, для системы автоматического регулирования двигателя без наддува [см. (1.25)] с регулятором прямого действия [см. (6.13)] эти уравнения составляют систему

 (7.3)
(7.3)
При совместном решении системы уравнений необходимо выбрать параметр, изменение которого должно быть исследовано. Наиболее часто в качестве такого параметра выбирают изменение угловой скорости φ вала двигателя.
Далее будет изложена формальная процедура получения одного дифференциального уравнения. Согласно этой процедуре дифференциальные уравнения САР сначала формально представляются в виде одного уравнения:
Δ·φ = Δφ (7.4)
где Δ – главный определитель системы; Δφ – присоединенный определитель, дающий правую часть уравнения системы, характеризующую внешние постоянно действующие возмущения (αд и αр). Главный определитель системы Δ составляется из коэффициентов дифференциальных уравнений при их выходных координатах. Если в качестве исследуемой выбрать систему (7.3), то такими выходными координатами являются φ и η, поэтому уравнения элементов необходимо переписать в виде:
 (7.5)
(7.5)
в соответствии с которыми главный определитель системы будет:
 (7.6)
(7.6)
Присоединенный определитель Δφ составляется путем замены в главном определителе столбца, соответствующего исследуемой координате, термами правой части дифференциальных уравнений (7.5), определяющих возмущающих воздействий на систему.
С учетом сказанного присоединенный определитель системы (7.4) получит вид:
 (7.7)
(7.7)
Раскрытие определителей и подстановка их в уравнение (7.4) приводит последнее к виду:
 (7.8)
(7.8)
где

 (7.9)
(7.9)
Это уравнение можно развернуть, если учесть в нем развернутые выражения собственных операторов двигателя (1.25) и регулятора (6.13). Тогда, наконец получим искомую «естественную » форму уравнения (7.4):
 (7.10)
(7.10)
где

 (7.11)
(7.11)
7.3. Частотные характеристики САР.
Разомкнутые системы. Для получения разомкнутой системы элементов необходимо замкнутую цепь воздействия САР «разорвать».
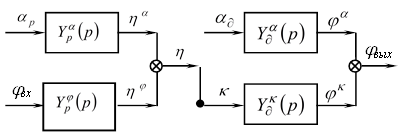 |
Рис. 7.3 Структурная схема разомкнутой САР прямого действия при αр ≠ 0 и αd ≠ 0
На рис 7.3, показана структурная схема разомкнутой системы прямого регулирования, входной координатой φвх которой является угловая скорость валика регулятора, отсоединенного от двигателя, а выходной φвых – угловая скорость вала двигателя. При отсутствии внешних возмущений уравнения элементов для рассматриваемого случая имеют вид:
 (7.12)
(7.12)
При χ = η (главная отрицательная обратная связь в разомкнутой системе отсутствует) совместное решение уравнений дает:
 (7.13)
(7.13)
или с учетом выражения (7.9):
 (7.14)
(7.14)
где  собственный оператор разомкнутой системы.
собственный оператор разомкнутой системы.
Пусть входная координата системы изменяется по закону косинуса. Тогда в соответствии с принципом суперпозиции можно принять, что
 (7.15)
(7.15)
Частное решение неоднородного дифференциального уравнения (7.14) в этом случае можно найти в форме
 (7.16)
(7.16)
Подстановка выражений (7.15) и (7.16) в уравнение (7.13) дает математическое выражение амплитудно-фазовой частотной характеристики разомкнутой системы:
 (7.17)
(7.17)
или в результате сопоставления с выражениями (1.29) и (6.16)
 (7.18)
(7.18)
Таким образом, амплитудно-фазовую частотную характеристику разомкнутой системы находят перемножением соответствующих характеристик ее элементов. Так как  - комплексная величина, то:
- комплексная величина, то:
 (7.19)
(7.19)
где x(Ω), y(Ω) соответственно вещественная и мнимая частотные характеристики разомкнутой системы. Эти характеристики можно построить по вещественным и мнимым частотным характеристикам элементов, входящих в САР. Например, в соответствии с формулой (7.18) можно написать:
 (7.20)
(7.20)
откуда:
 (7.21)
(7.21)
 (7.22)
(7.22)
Задаваясь различными значениями Ω и подсчитывая координаты x(Ω) и y(Ω) строят амплитудно-фазовые частотные характеристики разомкнутых систем.
Амплитудно-фазовые частотные характеристики элементов можно также представить в виде выражений (2.22) и (6.51), подстановка которых в формулу (7. 18) дает:
 (7.23)
(7.23)
где
 (7.24)
(7.24)
 (7.25)
(7.25)
Таким образом, вектор Y (iΩ) разомкнутой системы любого числа элементов, последовательно воздействующих один на другой, определяют перемножением векторов отдельных элементов. При этом амплитуды (модули) перемножаются, а фазы (аргументы) складываются.
Замкнутые системы. Частотные характеристики замкнутых САР получают при гармонических колебаниях одной из координат возмущающих воздействий на систему, т.е. αр или αд, вызывающих результирующие гармонические колебания регулируемого параметра φ. Для получения амплитудно-фазовых частотных характеристик замкнутых САР необходимо использовать дифференциальное уравнение замкнутой системы, например уравнение (7.8), и разделить все члены уравнения на собственный оператор. Если, например, αр = 0 и αд ≠ 0 (рис. 7.4,а), тогда амплитудно-фазовая частотная характеристика замкнутой системы по возмущающему воздействию αд после подстановки р = iΩ получит вид:
 (7.26)
(7.26)
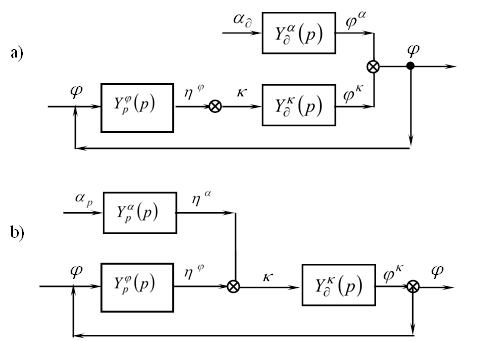 |
Рис. 7.4 Структурные схемы САР прямого регулирования двигателя:
а – с возмущающим воздействием; b – с управляющим воздействием.
Если, наоборот, αр ≠ 0 и αд = 0 (рис. 7.4, б), то система воспринимает управляющие воздействия, и тогда:
 (7.27)
(7.27)
Деление числителя и знаменателя правой части этого выражения на  дает:
дает:
 (7.28)
(7.28)
где амплитудно-фазовой частотная характеристика разомкнутой системы
Амплитудно-фазовая частотная характеристика замкнутой САР является комплексной величиной:
 (7.29)
(7.29)
где xω(Ω) = f(Ω) – вещественная и yω(Ω) = f(Ω) – мнимая частотные характеристики.
С учетом выражений (7.19, 7.28, 7.29) можно получить:
 (7.30)
(7.30)
 (7.31)
(7.31)
Амплитудно-фазовые частотные характеристику  можно также представить в виде:
можно также представить в виде:
 (7.32)
(7.32)
где
 (7.33)
(7.33)
 (7.34)
(7.34)
При заданном значении частоты Ω возмущающего воздействия по формулам (7.30) и (7.31) можно подсчитать значения и построить вещественную и мнимую частотные характеристики, а также амплитудно-фазовую частотную характеристику W (iΩ) замкнутой системы регулирования (рис. 7.5).
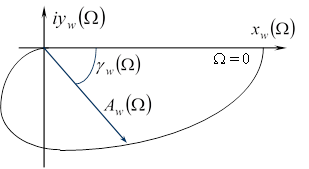 |
Рис. 7.5 Амплитудно-фазовая частотная характеристика замкнутой САР двигателя.
7.4. Устойчивость систем автоматического регулирования.
Понятие об устойчивости САР. Динамические свойства систем автоматического регулирования отражаются в переходных процессах. Обычно наибольший интерес представляют зависимости φ = f(t) регулируемого параметра от времени, которые можно определить решением (получением общего интеграла) дифференциального уравнения САР.
Общее решение (общий интеграл) дифференциального уравнения (7.8) и, следовательно, математическое выражение переходного процесса системы находится в виде суммы решений
φ = φ1 (t) + φ2 (t) (7.35)
где φ1 = f1 (t) - общее решение однородного дифференциального уравнения D (p) φ =0, например, вида
 (7.36)
(7.36)
и φ2 = f2 (t) - частное решение неоднородного уравнения, например, уравнения (7.10).
Решение однородного уравнения имеет вид:
φ1 = Сеpt (7.37)
где С и р – некоторые постоянные величины.
Подставляя выражение (7.37) в уравнение (7.36), найдем характеристическое уравнение:
 7.38)
7.38)
Используя полученное соотношение, общий интеграл уравнения (7.36) можно представить в виде суммы трех его составляющих:
 (7.39)
(7.39)
где рi являются корнями уравнения (7.38), которые могут быть как действительными положительными или отрицательными величинами, так и комплексными сопряженными. В последнем случае общему интегралу (7.39) можно придать тригонометрическую форму. Если уравнение (7.38) имеет один действительный корень р1 и два комплексных сопряженных р23 = α ± iΩ, то общий интеграл с помощью формул Эйлера (6.32) приводится к виду
 (7.40)
(7.40)
где  и
и 
Переходные процессы САР могут быть сходящимися и расходящимися. Сходящимися они являются тогда, когда нарушенный равновесный режим с течением времени восстанавливается, т.е. если φ1(t) → 0 при t → +∞.
Если же среди корней характеристического уравнения имеется хотя бы один действительный положительный корень или пара комплексных сопряженных корней с положительной действительной частью, то первоначальное отклонение φ0 будет увеличиваться во времени. Такие переходные процессы и их составляющие называются расходящимися.
Критерии устойчивости Рауза – Гурвица. Для суждения об устойчивости САР необходимо выяснить лишь алгебраические знаки корней характеристического уравнения. В связи с этим возникла идея отыскания таких условий и признаков, по которым можно было бы судить об устойчивости системы регулирования, не прибегая к решению характеристического уравнения.
В период 1873 – 1877 гг. математик Рауз нашел необходимые и достаточные условия получения отрицательных значений действительной части корней характеристических уравнений n-й степени в виде неравенств, составленных из коэффициентов уравнения. В 1895 г. А. Гурвиц также нашел условия сходимости переходных процессов и представил их в детерминантной форме. Так как раскрытие детерминантов Гурвица приводит к неравенствам Рауза, указанные критерии позже стали называть критериями сходимости (устойчивости) Рауза – Гурвица.
В соответствии с теоремой Виета характеристическое уравнение (7.38) при известных корнях р1, р2, р3,можно представить в виде:
 (7.41)
(7.41)
Если все корни – отрицательны, это произведение примет вид:
 (7.42)
(7.42)
или после раскрытия скобок:
 (7.43)
(7.43)
Так как в рассматриваемом случае в произведении (7.42)отрицательных величин нет, то коэффициенты уравнения (7. 43) могут быть только положительными.
Если сравнить уравнения 7.38) и (7.43), то А2/А3 =f2(pi); A1/A3=f1(p1); A0/A3=f0(pi), Поэтому необходимым условием устойчивости САР являются положительные значения всех входящих в уравнение коэффициентов (т.к. А3 всегда больше нуля)
(А2/А3) > 0; (A1/A3) > 0; (A0/A3) > 0 (7.44)
Кроме того, можно показать, что еще одним дополнительным условием устойчивости применительно к уравнению (7.38) является соотношение:
Рекомендуем посмотреть лекцию "30 Экологический аудит".
 (7.45)
(7.45)
где Δ – называется «детерминант Гурвица»
Критерии устойчивости Рауза – Гурвица дают возможность выяснить влияние на устойчивость тех или иных параметров САР. Пусть, например, переходные процессы двигателя описываются линейным дифференциальным уравнением (7.10) с коэффициентами (7.11). Эта САР оказывается устойчивой только при положительных знаках коэффициентов и при выполнении условия (7.45). После подстановки выражений (7.11) детерминант (7.45) получит вид
 (7.46)
(7.46)
откуда
 (7.47)
(7.47)




















