
Синтез нечетких регуляторов
Лекция № 7. Синтез нечетких регуляторов
Обобщенная процедура синтеза нечетких алгоритмов управления
Обобщенная процедура синтеза нечетких алгоритмов управления может быть сформулирована следующим образом:
1. Определяется множество целей, которые ставятся перед системой. (Какие конечные результаты преследует создание системы?)
2. Уточняются множества входных и выходных переменных регулятора. (какие координаты объекта должны наблюдаться и какие управляющие воздействия должны изменяться, для того чтобы достичь поставленных целей?)
3. Перечисляются возможные ситуации в работе системы. (как должны выбираться лингвистические переменные и какие значения (терм они могут принимать?)
4. Формируется база правил. (Какой набор правил отражает желаемые изменения состояния системы?)
5. Производится выбор метода фаззификации.
6. Конкретизируются механизм вывода и методы дефаззификации. (по каким зависимостям входы нечеткого регулятора должны преобразовываться в его управляющие воздействия ?).
Рекомендуемые материалы
Рассмотрим особенности применения данной процедуры на следующем примере, представляющем прежде всего методический интерес. Пусть структурная схема ИСУ соответствует рис. 3.1, т. е. нечеткий регулятор используется для непосредственного (прямого) управления объектом. Тогда:
Цель синтеза - создание "хорошего" регулятора, обеспечивающего малое перерегулирование, высокое быстродействие и слабую колебательность (т. е. быстрое затухание) переходных процессов.
Входные величины регулятора - сигнал ошибки е = r-у и сигнал ее производной ce=de(t)/dt.
Выход - управляющее воздействие – u.
Для того чтобы выработать стратегию управления, обратимся к рис. 3.4, на котором показан график переходной функции системы y(t), т. е. ее реакции на единичное ступенчатое воздействие r(t).
Разобьем график y(t) на следующие характерные участки:
I - "Начало переходного процесса":
ошибка еk велика, скачок скорости ее изменения сеk; резко увеличить управляющее воздействие  ;
;
II - "Продолжать движение":
ошибка ек велика, но убывает; поддерживать управление uk на прежнем уровне или слегка уменьшить;
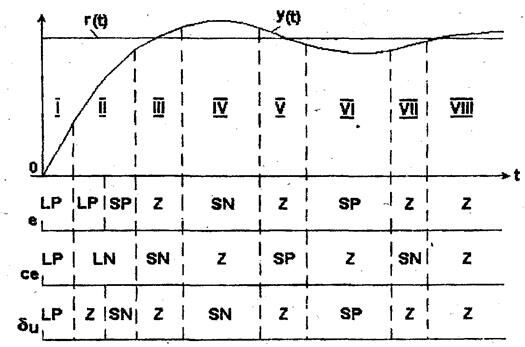
Рис. 3.4. График переходной функции системы
III, V, VII - "Достигли уровня уставки":
ошибка еk около нуля, скорость ее изменения достаточно мала; сохранить управление uk;
IV ,VI - "Достигли локального максимума (минимума)":
ошибка еk невелика, скорость ее изменения сеk около нуля; незначительно уменьшить (или увеличить) uk;
VIII - "Достигли установившегося состояния":
ошибка ek и скорость ее изменения cek около нуля; сохранить управление uk
Здесь ek, cek, uk - значения сигнала ошибки, скорости ее изменения и управляющего воздействия в k-й момент времени tk (k=0,1,2,...); .
4°. Введем следующие обозначения:
LP - "большое положительное" (large positive);
SP - "малое положительное" (small positive);
Z - "около нуля" (zero);
SN - "малое отрицательное"(small negative);
LN - "большое отрицательное" (1аrgе negative);
Тогда правила формирования сигнала управления можно записать в следующем виде (см. соответствующие пояснения на рис. 3.4)
ПРАВИЛО I: "ЕСЛИ  , ТО
, ТО  ";
";
ПРАВИЛО II: "ЕСЛИ  , ТО
, ТО  "; ИЛИ "ЕСЛИ
"; ИЛИ "ЕСЛИ  , ТО
, ТО  ";
";
ПРАВИЛО III: "ЕСЛИ  , ТО ";
, ТО ";
ПРАВИЛО IV: "ЕСЛИ  , ТО ";
, ТО ";
ПРАВИЛО V: "ЕСЛИ  , ТО ";
, ТО ";
ПРАВИЛО VI: "ЕСЛИ  , ТО
, ТО  ";
";
ПРАВИЛО VIII: "ЕСЛИ  , ТО ".
, ТО ".
(Правило VII отсутствует в данном перечне, т.к. номер правила здесь совпадает с номером участка кривой переходного процесса на рис. 3.4, а лингвистические переменные  ,
,  и
и  на участке VII принимают те же значения, что и на участке III).
на участке VII принимают те же значения, что и на участке III).
Как видно, приведенный алгоритм управления представляет собой нечеткий, "расписанный по шагам" вариант реализации ПИД - алгоритма.
Для рассматриваемого случая, когда нечеткий регулятор имеет 2 входа и 1 выход, удобно представить данный алгоритм управления с помощью так называемой таблицы решений (decision table) (табл. 3.1).
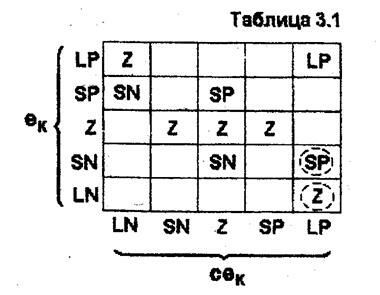
Данная таблица заполняется следующим образом.
Рекомендуем посмотреть лекцию "6в. Программное обеспечение систем управления".
На пересечении i-й строки и j-ro столбца записывается требуемое значение выходной переменной  соответствующее i-му значению (терму)
соответствующее i-му значению (терму)  и j-му значению
и j-му значению  .
.
Анализ полученной таблицы решений показывает, что предложенный выше набор правил I - VIII не является функционально полным (таблица содержит большое число пустых клеток). Для заполнения недостающих клеток необходимо проанализировать большое число ситуаций управления. Например, возможен "инвертированный" вариант реализации Правила II:
"ЕСЛИ  , ТО " ИЛИ "ЕСЛИ
, ТО " ИЛИ "ЕСЛИ  , ТО ",
, ТО ",
что позволяет внести в таблицу решений 2 дополнительных элемента (обведены в табл. 3.1 пунктирными окружностями).
Очевидно, что увеличение размерности таблицы решений приводит не только к определенным трудностям с точки зрения пополнения (доопределения) системы правил принятия решений, но и связано с возрастанием вычислительных затрат при работе регулятора.
Поэтому на практике рекомендуется принимать число значении (уровней квантования) каждой лингвистической переменной равным 3 - 7.



















